2.4m 跨聲速風洞連續變迎角試驗關鍵技術研究
2014-11-21 00:42:00王瑞波薛江平
實驗流體力學 2014年1期
關鍵詞:信號
謝 艷,李 平,蔣 鴻,王瑞波,薛江平
( 中國空氣動力研究與發展中心,四川 綿陽 621000)
0 引 言
目前,我國的高速風洞多為暫沖式風洞,因受風洞運行時間、流場調節能力、數據精細化處理等方面的限制只能采用階梯測力試驗方式,試驗得到的數據點稀疏,難以準確描述氣動試驗曲線細節特征。而連續變迎角測力試驗技術可有效改善上述現象[1]。
連續變迎角測力試驗技術最初是在國外連續式風洞發展起來的試驗技術,它獲得的測力試驗結果具有試驗信息豐富、氣動特性曲線光滑連續、操穩特性評估精確度高、關鍵氣動力參數判讀精準等顯著優點[2]。由于連續式風洞和低速風洞運行時間長,模型迎角可以慢速運動,所以實現連續變迎角試驗有其先天優勢,目前在國內低速風洞中已經得到有效應用[3-5]。在暫沖式高速風洞中,因受風洞運行時間的限制,連續變迎角的迎角運行速度要達到1°/s 左右,這樣就會產生如下幾個關鍵性的問題:(1) 模型運動對流場的擾動大,流場快速精確補償難; ( 2) 試驗信號中高頻成分增加,與干擾信號的頻率界線模糊,數據降噪處理困難;(3) 信號間微小的不同步會隨迎角運行速度的增加而加劇影響試驗數據的準度。
為充分發揮2.4m 跨聲速風洞的優勢,開展了大型暫沖式跨聲速風洞連續變迎角試驗技術研究,較好解決了上述的幾個關鍵性難題,建立了2.4m 跨聲速風洞連續變迎角測力試驗技術。下面詳細介紹針對這幾個關鍵問題的研究。
1 風洞流場的快速跟隨補償
2.4m 跨聲速風洞由于采用多變量控制策略,系統間解耦困難,階梯測力時,僅能滿足階梯采集時刻流場處于穩定狀態的要求[6]。連續變迎角測力試驗時,由于迎角持續運動,不間斷地擾動流場,又要求流場必須時刻保持在穩定狀態,所以原有控制系統就顯得能力不足,致使連續變迎角初次調試時,Ma 數超差0.011。因此對風洞流場控制環路等進行了優化改進[7],提高了連續變迎角測力試驗時Ma 數控制的精準度。
1.1 總靜壓濾波器的優化
風洞總靜壓的實時精確測量是保證精準控制Ma數的前提。為了保證總靜壓測量的精確可靠,通常會對總靜壓信號進行低通濾波處理。濾波截止頻率過低,總靜壓信號會滯后失真,引起流場調節反應遲鈍;濾波截止頻率過高,信號中會疊加高頻干擾信號,引起流場誤調節,反而擾亂流場。因此總靜壓濾波的最優化是首先要解決的問題[8]。
通過多種測試和分析,選定2.4m 風洞總靜壓最優濾波截止頻率的區間為1Hz ~10Hz。同時考慮到風洞控制參數的適應性,優化改進是采取循序漸進逐步靠近最優濾波截止頻率的方法進行的。即首先將總靜壓濾波截止頻率由最先的0.7Hz 改進為1Hz,待風洞控制參數適應后,再逐步將1Hz 改為2Hz,2Hz改為3Hz。改進前后的Ma 數對比見圖1。結果表明總靜壓濾波的優化改進明顯改善了控制系統對流場擾動的控制能力。
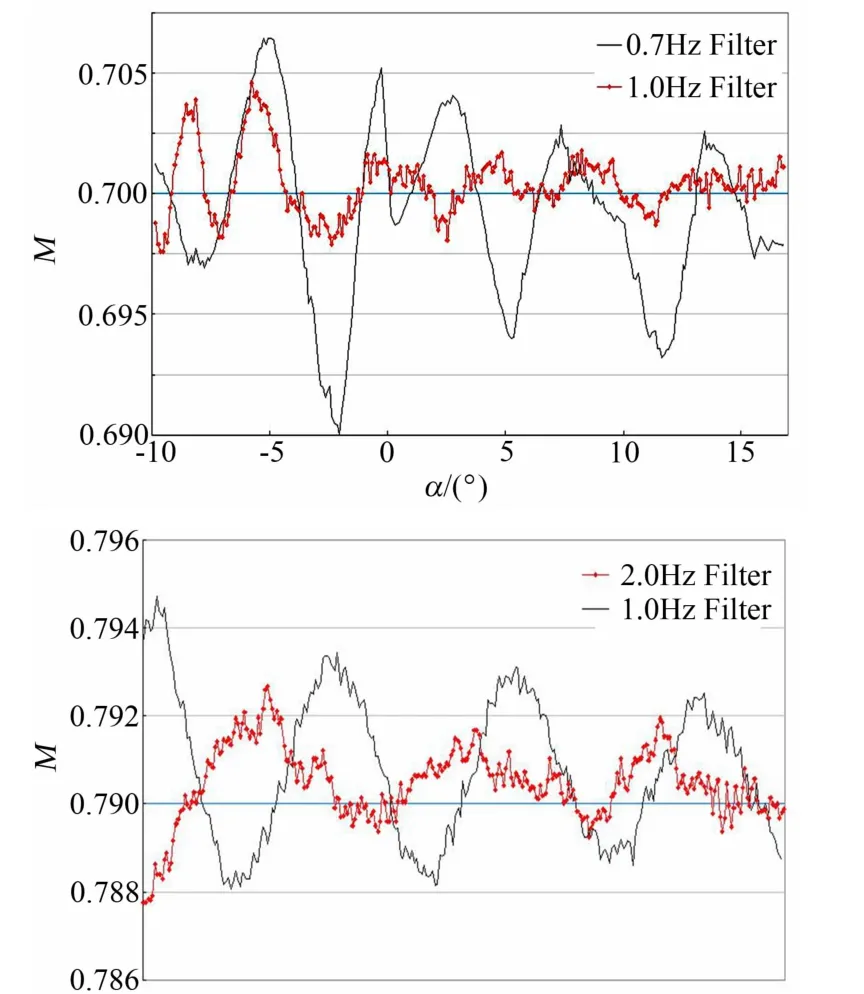
圖1 濾波截止頻率優化改進的效果Fig.1 Effects of optimizing cutoff frequency of filter
1.2 柵指PID 參數優化
2.4m 跨聲速風洞總靜壓的控制是多個獨立的控制環路完成,主要是總壓控制環路、柵指( 當Ma 數≤0.9 時使用) 控制環路、駐室抽氣( 當Ma 數>0.9 時使用) 控制環路。
對風洞試驗數據進行分析后,可得知靜壓控制精度是影響Ma 數的關鍵性因素。另外,從靜壓與迎角相關分析中,可明顯看出模型迎角變化帶給靜壓的擾動。因此采用進一步優化柵指PID 參數,強化PID 調節效果,加速Ma 數的收斂。圖2 顯示優化PID 參數中的KI( 積分補償系數) 的效果。PID 調節參數優化,加速了流場Ma 的收斂和穩定。
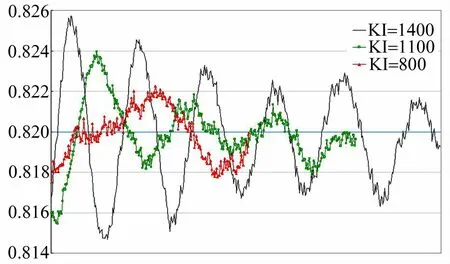
圖2 柵指PID 中KI 優化的效果Fig.2 Effects of optimizing KI parameter of PID for choke finger control
1.3 駐室抽氣系統的前饋補償
2.4m 跨聲速風洞在Ma 高于0.9 時采用駐室抽氣調節Ma 數,但是因2.4m 風洞大駐室壓力的變化也需要時間,致使此環路的調節滯后較多,從而造成Ma 數的波動較大。
采用在原駐室抽氣PID 調節的基礎上,增加適量的前饋補償。具體做法是:當檢測到Ma 數接近誤差帶的上下邊緣時,在駐室抽氣系統的反饋量中增加適量前饋補償,使駐室抽氣機構提前快速運動,將Ma數拉回給定值。
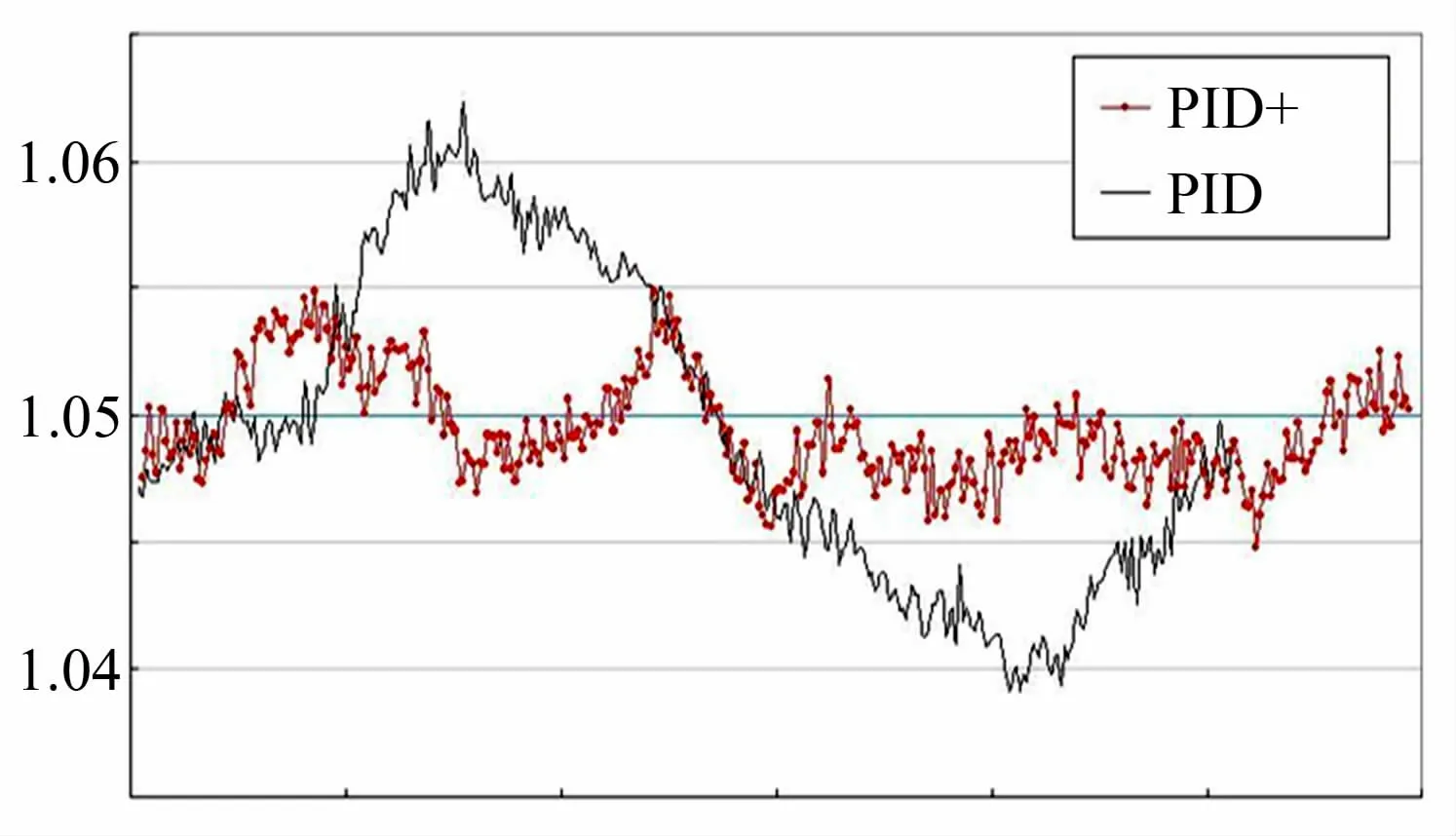
圖3 駐室抽氣的前饋補償效果Fig. 3 Effects of feedforward compensation for air exhaust of plenum chamber
在駐室抽氣環路中增加的前饋補償,有效改善了駐室抽氣調節響應滯后的問題,保證了連續變迎角測力試驗Ma 數的快速精準控制。
2 連續變迎角試驗數據的濾波降噪處理
2.1 階梯、連續測力試驗信號的頻譜分析
對于階梯測力試驗方式,每個階梯穩定時,流場、迎角均是穩定的,此狀態下試驗信號趨于恒定值,信號能量集中在0Hz 處,換句話說,就是非0Hz 處的信號都是干擾信號。因此,此狀態下濾波處理相對容易。對于連續變迎角測力試驗,流場穩定后迎角持續勻速運動,并同步采集,此狀態下試驗信號是一種漸變的信號,所以信號能量會根據迎角變化的快慢分布在一段較寬或者較窄的頻帶中。雖然信號的主要能量仍然集中在低頻段,但高頻段或多或少分布著有用信號。所以在高頻段,其少量的有用信號與干擾信號交織疊加在一起,導致連續變迎角測力試驗數據的濾波降噪處理困難:一是濾波截止頻率的選取困難;二是在信號和干擾交織的頻段,濾波無法分辨信號和干擾[9]。
2.2 連續變迎角試驗數據濾波降噪策略
針對連續變迎角試驗信號頻譜分析的結果,制定下述的濾波降噪策略。第一步: 硬件濾波,采用較高頻率( f ≧6Hz) 的硬件濾波先對數據進行濾波處理;第二步:軟件濾波,通過可逆的軟件濾波精選出較佳的軟件濾波參數,用精選出的濾波參數對數據再進行軟件濾波處理; 第三步,小波降噪,對殘留在高頻段的干擾信號進行小波降噪處理。
采用此濾波降噪策略較好的解決了連續變迎角試驗數據的濾波降噪問題。
3 試驗數據的同步處理
3.1 數據不同步的影響分析
測力試驗時,模型姿態角通常由角度傳感器測得,而氣動力和力矩則由天平測量得到。由于角度傳感器和天平的響應特性不同,所以信號之間存在小量(0 ~0.05s 左右) 的時序差。對于階梯測力,階梯穩定時間遠大于此時序差,因此對試驗數據毫無影響。而迎角運行速度較快的連續變迎角試驗使信號之間時序差的影響凸顯出來,從而使得連續變迎角測力試驗數據發生迎角的平移現象。
3.2 不同步量的精確測量及同步修正
為精確求出信號之間的時序差,創新引用互相關函數解決此難題。
互相關函數的原理:假設兩個平穩隨機信號的時間歷程為x(t)、y(t),則兩個信號的互相關函數Rxy(τ)為:

根據互相關函數的性質,假定x( t) 是系統的輸入信號,而y( t) 是系統的輸出信號,則互相關函數Rxy( τ) 最高峰處的τ 就是該系統的滯后時間[10-11]。
下面以天平升力元信號Y( t) 和模型迎角傳感器信號α( t) 為例具體說明此原理和方法。由氣動知識可知Y( t) 是α( t) 的函數,且在小角度范圍內Y( t) 近似是α( t) 的線性函數,可將α( t) 看作系統的輸入,而將Y( t) 看作系統的輸出,因此當α 為最大值時,Y元也應該為最大值; 當α 為最小值時,Y 元也應該為最小值。假如這兩個信號之間存在不同步,則Y 元的最大值就不會對應α 的最大值。此時,利用互相關函數的性質及特點,求互相關函數:
互相關函數RαY( τ) 最高峰處的τ,就是天平升力元Y( t) 對迎角α( t) 的精確延遲時差。以此類推計算出天平其它元和迎角傳感器之間的延遲時差。
在精確求出天平各元信號與迎角傳感器信號的延遲時差后,再以迎角傳感器信號的時序為標準時序,對原始數據進行時序對齊修正,得到完全同步的原始數據。
應用互相關函數,可精確計算出風洞試驗中各信號之間的時序差,并據此對數據進行同步修正,從而保證了連續變迎角測力試驗數據的準確性。

4 標模驗證情況
解決了上述的關鍵問題后,在2.4m 跨聲速風洞建立了連續變迎角測力試驗技術。并先后使用J7、Ty-154 等多個模型進行了驗證試驗,驗證結果如下:
(1) 連續變迎角試驗,Ma 數控制的精準度達到了±0.002( M=0.3 ~0.9) ( 見圖4) ;
(2) 連續變迎角試驗數據的準度與階梯測力數據的準度相當,連續與階梯氣動系數差量已進入測量的正常誤差帶范圍( 見圖5) 。具體的差量為: 縱向:|ΔCL|≤0.003,|ΔCm|≤0.0002 和|ΔCD|≤0.0003;橫向:|ΔCY|≤0.0003,|ΔCl|≤0.0001 和|ΔCn|≤0.0002;
( 3) 連續變迎角測力試驗數據的精度在迎角±4°范圍內與階梯測力的精度相當,而在迎角4° ~20°范圍,連續變迎角試驗數據的精度優于階梯測力試驗的精度( 見圖6) ;
(4) 模型的勻速運動可有效減小模型的振動,從而提高數據的精度和試驗的安全性;
(5) 連續變迎角測力比階梯測力節約約16%的風洞試驗時間。
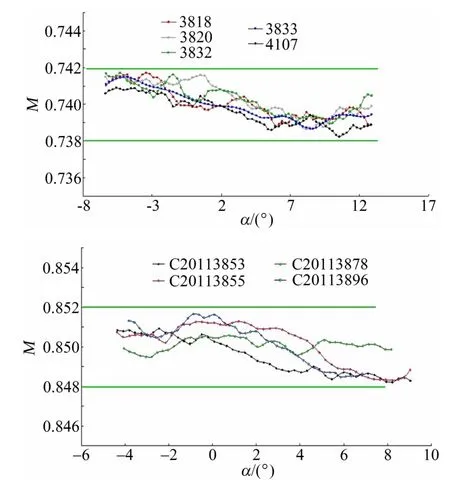
圖4 連續變迎角試驗Ma 數精準度情況Fig.4 Accuracy of Ma for continuous sweeping test
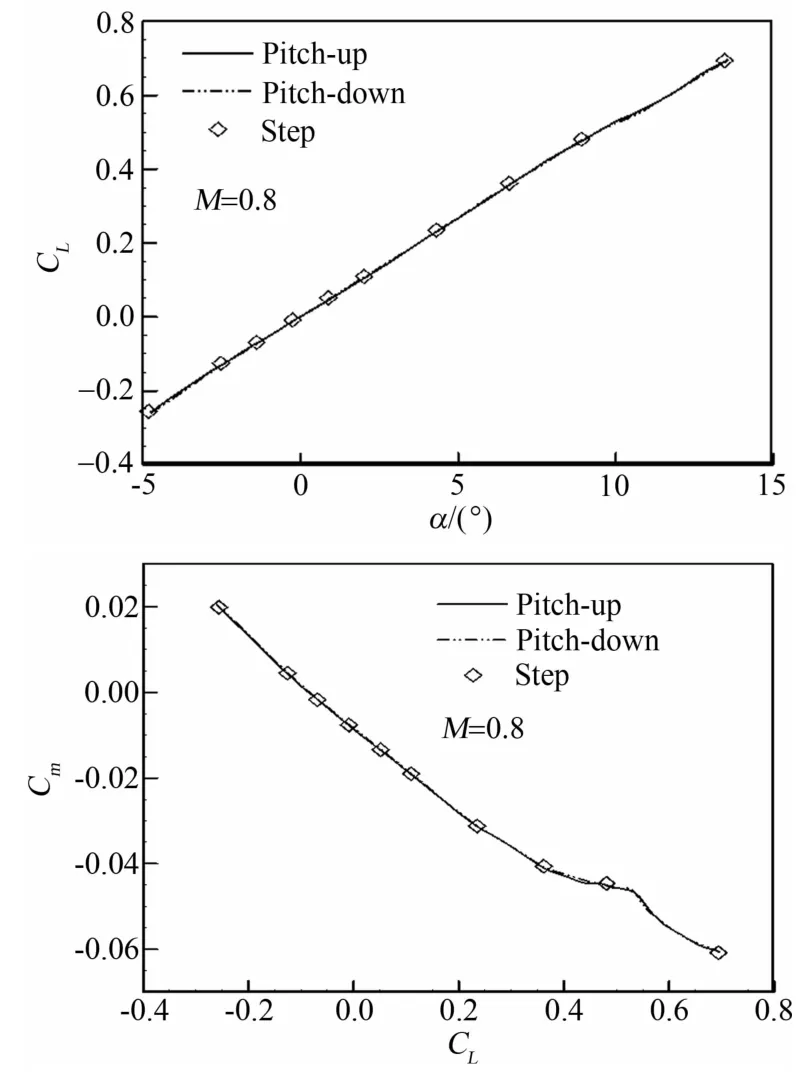
圖5 連續變迎角數據與階梯數據對比情況Fig.5 Accuracy comparison of continuous pitch-pause( step) test

圖6 連續變迎角數據與階梯數據的精度比較情況Fig.6 Precision comparison of continuous pitch-pause( step) test
5 結 論
以2.4m 跨聲速風洞為研究平臺,解決了實現連續變迎角試驗技術中的Ma 數快速跟隨、數據降噪處理、信號精確同步等幾個關鍵性的技術難題,建立了工程實用的暫沖式高速風洞的連續變迎角測力試驗技術,既提高了試驗數據的數質量,又提高了試驗的效率和安全性。
[1] 魏志,謝艷,吳軍強,等. 連續變迎角試驗技術在大型暫沖式跨聲速風洞中的應用[J]. 實驗流體力學,2011,25(4) : 99-102.Wei Z,Xie Y,Wu J Q,et al. Application of continuous sweeping force measuring technology in large intermittent transonic wind tunnel[J]. Journal of Experiments in Fluid Mechanics,2011,25(4) : 99-102.
[2] 惲起麟. 實驗空氣動力學[M]. 北京: 國防工業出版社,1991.
[3] 顧藝,岑飛,溫渝昌,等. 基于非接觸測量技術的低速風洞連續掃描試驗技術研究[J]. 實驗流體力學,2013,27(5) : 98-104.Gu Y,Cen F,Wen Y C. Research about continuous scanning test technique based on non-contact measurement technique in low speed wind tunne[J]. Journal of Experiments in Fluid Mechanics,2013,27(5) : 98-104.
[4] 唐喬喬,張衛國,劉忠華,等. 8m ×6m 風洞特大迎角機構連續掃描試驗技術研究與應用[J]. 實驗流體力學,2012,26(2) : 81-85.Tang Q Q,Zhang W G,Liu Z H,et al. Research and application of the continuous scan technique to the high angle of attack equipment in 8m×6m wind tunnel[J]. Journal of Experiments in Fluid Mechanics,2012,26(2) : 81-85.
[5] 程松,劉曉暉,溫渝昌. 大攻角連續掃描試驗技術在某型號飛機上的應用[J]. 實驗流體力學,1999,13(4) :27-31.Cheng S,Liu X H,Wen Y C. An application of the continuous scan technique to the high angle of attack fighter model test[J]. Journal of Experiments in Fluid Mechanics,1999,13(4) : 27-31.
[6] 劉政崇. 高低速風洞氣動與結構設計[M]. 北京: 國防工業出版社,2003.
[7] 張永雙,陳旦,陳嬌,等. NF-6 連續式跨聲速風洞馬赫數控制方法比較與研究[J]. 實驗流體力學,2013,27(2) :95-100.Zhang Y S,Chen D,Chen J,et al. Comparison and research on the Mach number control methods for the NF-6 continous transonic wind tunnel[J]. Journal of Experiments in Fluid Mechanics,2013,27(2) : 95-100.
[8] 李平,芮偉,秦建華,等. 2m ×2m 超聲速風洞測量系統與運行管理系統研究[J]. 實驗流體力學,2012,26(4) : 96-100.Li P,Rui W,Qin J H,et al. Development of measurement and operation management system in 2m × 2m supsonic wind tunnel[J]. Journal of Experiments in Fluid Mechanics,2012,26(4) : 96-100.
[9] 張鵬,魏志,王春,等. 基于小波變換的風洞連續信號降噪分析[J]. 兵工自動化,2013,32(5) : 63-67.
[10]楊建軍,張俊,張龍,等. 基于PSD 的模型姿態角和振動測量技術原理性研究[J]. 實驗流體力學,2012,26(4) : 79-82.Yang J J,Zhang J,Zhang L,et al. Priniciple and method research for optical measuring system of model attitude angle and vibration based on PSD[J]. Journal of Experiments in Fluid Mechanics,2012,26(4) : 79-82.
[11]彭玉華. 小波變化與工程應用[M]. 北京: 北京科學出版社,1999.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
