“十字”鴨舵控制低旋尾翼彈方法研究*
2014-11-23 07:54:40
艦船電子工程 2014年1期
關鍵詞:方向
(海軍裝備部某軍代室 太原 030027)
1 引言

圖1 制導炮彈結構示意圖
隨著現代戰爭對彈藥精確打擊能力要求的提高,各種低成本制導彈藥成為彈藥行業的重點發展方向之一。其中采用鴨舵,通過彈體自旋對高低和側偏兩個方向進行控制是一種較為有效的彈道控制方法。炮射制導彈藥由于受其空間體積與飛行特性限制,一般采用鴨式氣動布局。與脈沖發矢量的有限次作用不同,鴨舵可進行連續控制,能擴大彈道控制范圍并提高命中率[1~5]。某型艦載炮射增程制導彈藥采用鴨式布局和旋轉雙通道控制原理,其控制力來源于由兩個電機驅動兩對對稱且垂直安裝的“十字”鴨舵,結構示意圖如圖1所示。只有舵機能夠實時準確產生控制系統解算出的彈體需要的控制合力及方向,才能使彈體產生所需的過載,使制導彈藥沿理想彈道飛行并精確命中目標。本文為解決“十字”鴨舵如何實時、準確提供旋轉彈體需要的橫向和高低方向控制力問題,根據其結構和特點,研究了由彈體轉速和姿態角及彈體所需控制力求解兩對舵實時舵偏角的方法。經試驗驗證依據該方法進行鴨舵控制時,能夠實時、準確得到彈體所需控制力。
2 程控飛行鴨舵控制方法
程序控制飛行是制導彈藥進行控制系統原理驗證的一個重要環節[6~7]。該制導彈藥在程序控制飛行中要求彈體控制合力在鉛垂面內向上,進行重力補償的同時實現彈體的滑翔控制飛行。
假設任意時刻,彈體所需向上控制力為F,即鉛垂方向合力FY=F,水平方向合力FZ=0。假設t=0時刻為正姿態(滾轉姿態角q=0°,水平舵舵1在水平位置,鉛垂舵舵2在鉛垂位置),則舵機1、2產生的控制力為:F1=F,F2=0,此時Fy=F1=F。如圖2所示。

圖2 滾轉姿態θ=0°時程序控制示意圖
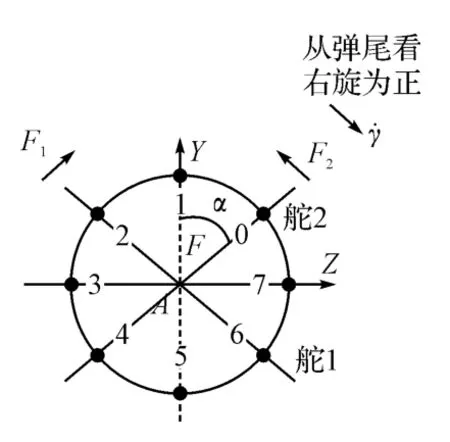
圖3 滾轉姿態θ=α時程序控制示意圖
假設彈體右轉α角度時,舵機位置如圖3所示。合力為F,舵1和舵2的控制力方向與鉛垂方向都存在α角度方向偏差,必須兩舵同時作用形成合力[8~10]。由力學原理可知:

解方程式(1)得:

假設任意時刻由彈體姿態測量裝置測得此時的滾轉姿態角θ=θ0+wt,其中w為彈體轉速,θ0為彈體初始姿態角。將θ=θ0+wt代入式(2)得:

考慮舵機作為執行機構存在延遲,假設延遲時間為T,則系統必須對延遲進行補償,將延遲補償加入式(3)得:

根據舵偏角和舵控制力的關系即可得到兩個舵機的舵偏角,假設舵控制力和舵偏角成比例關系(Fd=mδ,其中Fd為舵控制力,δ為舵偏角,m為比例系數),則

3 制導控制飛行舵控方法

圖4 滾轉姿態θ=α時,控制力方向為φ 的制導飛行控制示意圖
制導控制飛行是制導彈藥進行控制系統精度驗證的一個重要環節。它要求舵機實時、準確提供制導彈藥所需控制力。假設θ為滾轉姿態角,φ為控制合力方向,兩個角度都以從彈尾看向上為0 位,右旋為正,F為合力,彈體在正姿態上,F1向上為正,F2向左為正,如圖4所示。由圖中力學關系可以得到:

解方程組得:

則

考慮舵機作為執行機構存在延遲,假設延遲時間為T,則系統必須進行補償,則

根據舵偏角和舵控制力的關系即可得到兩個舵機的舵偏角。

由式(5)和式(10)對比可知,程序控制是制導飛行控制的一種特殊形式,即當φ=0,制導飛行控制方程等同于程序控制方程。
4 試驗驗證

圖5 舵機反饋曲線圖
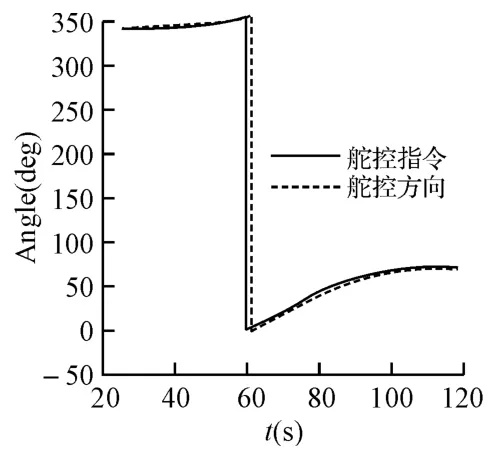
圖6 風洞試驗理論合力方向和實際合力方向對比圖
為了驗證控制方程的正確性,將制導彈放在風洞中進行吹風打舵試驗。試驗中首先定性地對制導彈舵控合力方向進行觀察,合力方向基本滿足要求;同時用黑匣子記錄每一時刻舵機反饋信號(如圖5所示)及彈體姿態角,數據處理的結果如圖6所示,舵機形成的合力方向和控制系統輸出的合力方向基本一致。由此得到該舵控方程正確、可行。
5 結語
本文根據制導彈藥“十字”鴨舵的特點,由彈體滾轉姿態角和轉速,推導了將控制系統解算的彈體所需控制力分配到兩對舵機的舵控方程,經試驗驗證,鴨舵生成的合力和控制系統解算得到的合力大小和方向均一致。為研究方便,文中假設所需控制力和舵偏角成線性關系,在實際應用中可以將控制力與舵偏角的非線性關系加入控制方程中。該控制方法已在某彈藥中得到應用,具有較高的工程應用價值。
[1]Mark F Costello.Potential Field Artillery Projectile Improvement Using Movable Canards[R].ADA324372,1997.
[2]任克偉,徐軍,孟吉紅,等.制導火箭彈射程導引的一種新方法[J].彈箭與制導學報,2007,27(2):119-121.
[3]Ollerenshaw D,Costello M F.Model predictive control of a direct fire projectile equipped with canards[J].Journal of Dynamic System,Measurement and Control,2008,130(061010):1-11.
[4]Dean M.Guidance,navigation and control munitions[D].Philadelphia,USA:Drexel University,2008.
[5]李巖,王中原,易文俊,等.鴨舵控制的防空制導炮彈重力補償分析[J].彈道學報,2008,20(4):32-35.
[6]陳智剛,王志軍,C.N.斯特列夫.運用地磁傳感器對旋轉彈進行程序控制[J].華北工學院測試技術學報,2001,15(3):169-170.
[7]王江,林德福,祁載康.末端修正迫彈程控系統設計參數辨識[J].戰術導彈技術,2008(6):75-77.
[8]李巖,王中原,易文俊,等.基于鴨式布局的有控彈藥攻角運動仿真研究[J].南京理工大學學報(自然科學版),2009,33(2):242-246.
[9]婁壽春.導彈制導技術[M].北京:宇航出版社,1989:70-74.
[10]孫東陽.滑翔增程制導炮彈控制系統設計與分析[D].南京:南京理工大學,2012:9-10.
[11]錢杏芳,林瑞雄,趙亞男.導彈飛行力學[M].北京:北京理工大學出版社,2008:29-35.
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
