船舶電站信號采集方案設計
2014-11-25 03:10:23于振國許冬晨
中國修船 2014年4期
于振國,許冬晨
(謝克斯特(天津)海洋船舶工程有限公司,天津 300467)
船舶電站信號采集方案設計
于振國,許冬晨
(謝克斯特(天津)海洋船舶工程有限公司,天津 300467)
文章介紹了為實現船舶電站的自動化監測和實時控制,需對船舶電站的相關參數采集,以提供給以數字信號處理器為處理核心進行計算控制,涉及到電壓、電流、頻率檢測、相角等數據的采集,通過這些采集到的信號,可以判斷船舶電站目前的運行狀態和所需進行的操作。
船舶電站;數字信號處理器;信號采集
1 研究的意義及國內外研究現狀
信號的采集可以說是監控船舶整個系統可靠運行的基礎和前提,對于集成化程度日益提高的船舶電站,在日常的運行過程中,可能因為人為因素或其他原因,不可避免出現各種的故障和不正常的運行狀態。一旦發生故障,監控系統必須第一時間采取反應、及時報警、切斷故障源,否則會導致設備燒毀、產品壽命縮短,更嚴重會產生影響整船電力系統穩定性等嚴重后果。所以,必須要對電力系統進行有效的監控,對于不可抗拒的事故發生應該做到及時發現,自動切斷該設備。[1]
目前,以單片機為處理模塊的監控設備由于其CPU自身處理數據的局限性,使得保護裝置無法選用先進而精確的數字濾波算法和保護算法,導致整體系統的反應速度和安全性遠遠不能滿足日益復雜的船舶電力系統要求。近年來,飛速發展的DSP(數字信號處理器digital signal processor) 已成為通信、計算機、消費類電子產品等領域的核心器件,成為電子產品更新換代的決定因素,國外公司以DSP為處理核心,研制的新一代監控系統技術已經逐步成熟,但由于其要求苛刻,價格昂貴,人機通話困難,使得國內船舶很少裝配,因此研究具有自主知識產權和適應中國船舶需求的監控保護系統顯得日益急迫。[2-3]
2 方案設計思路[4]
此次設計的船舶監控裝置通過采集測量船舶電站電機和母排的電壓、電流、頻率以及相角,實現對電站的逆功、過載、過壓、過流、欠壓、失電等一系列保護以及遠程自動控制等功能,具體流程如圖1所示。本裝置采用TMS320LF2407ADSP作為系統處理器,控制模塊主要功能是根據監控采集的電站信息,發出相應的控制/報警信號,將信息傳遞給顯示模塊和上位機。
顯示模塊主要由單片機控制,液晶顯示模塊采用CM3240128點陣屏顯示。單片機通過串口通訊協議獲得船舶信息,通過顯示屏顯示船舶相關狀態。
上位機通訊采用CAN總線技術,由于DSP集成了CAN控制器,只需接入CAN收發器即可實現與其他模塊通訊,SN65HVD230D是TI公司DSP芯片和CAN總線接口的專用收發器,能實現良好通訊速率和抗干擾性,在實際應用中被廣泛采用。
3 信號采集方案[5]
為實現船舶電站的準確監控,前提要能夠對船舶電站和電網的電壓、電流和頻率實現有效準確實時的采集,然后通過對采集到的信號進行處理,使模擬信號成為控制模塊可以識別的數字信號。
信號采集設計方案主要包括信號采集模塊、信號預處理模塊和模數轉換模塊。其中信號采集模塊主要是電壓電流互感器、隔離裝置組成,主要是為了實現信號線性采集,以保證控制模塊中算法的可靠和控制的精確。
信號采集模塊分為電壓采集和電流采集兩部分。電壓采集使用電壓互感器進行隔離降壓,將信號提供給信號預處理模塊。電流信號采集需要將電流互感器采集到的信號轉換為電壓再提供給信號預處理模塊。
預處理模塊是本文的重點,主要包含濾波電路,轉換電路和比較電路等。
3.1濾波電路
由于電站運行環境相對較差,信號中存在干擾諧波,影響控制模塊獲得信號準確性,嚴重時會為控制模塊傳遞錯誤的信息,為保證采樣的準確性,系統首先對采集到信號進行處理,采用的壓控電源型二階低通濾波器,過濾信號中的雜波,原理圖如圖2所示。
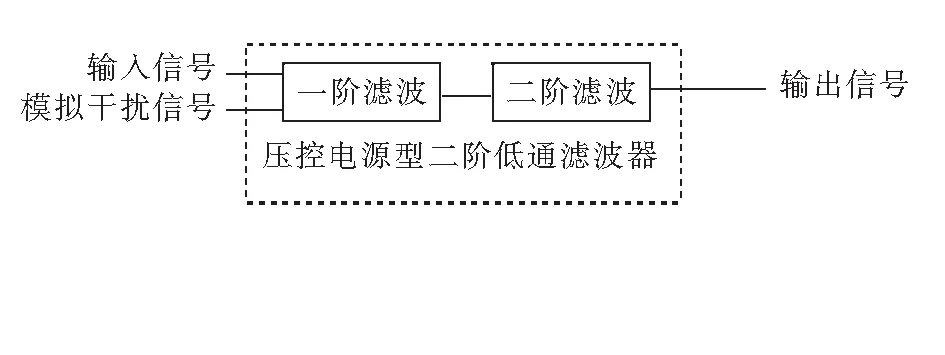
圖2 壓控電源型二階低通濾波器原理圖
通過包含過零點毛刺和高頻分量等干擾信號的輸入信號,模擬出現實工況下采集到的雜波信號。具體仿真結果如圖3~圖5所示。通過圖3、圖4、圖5可以看出,包含干擾信號的采集信號在經過一階濾波后,擾動信號明顯消除,但獲得信號仍不夠平滑,經過二階濾波后,干擾信號消除的效果更佳。
3.2轉換電路
經過濾波后的信號,接入有效值轉換TRMS/DC芯片AD536AJH芯片,美國模擬數字器件公司的AD536AJH真值轉換芯片,計算精度高,反應迅速,可以直接獲得采集信號的有效值,可以被控制模塊直接采集,獲得電壓,電流的有效值后,通過相應的算法完成相關數據的監控,電路圖見圖6。
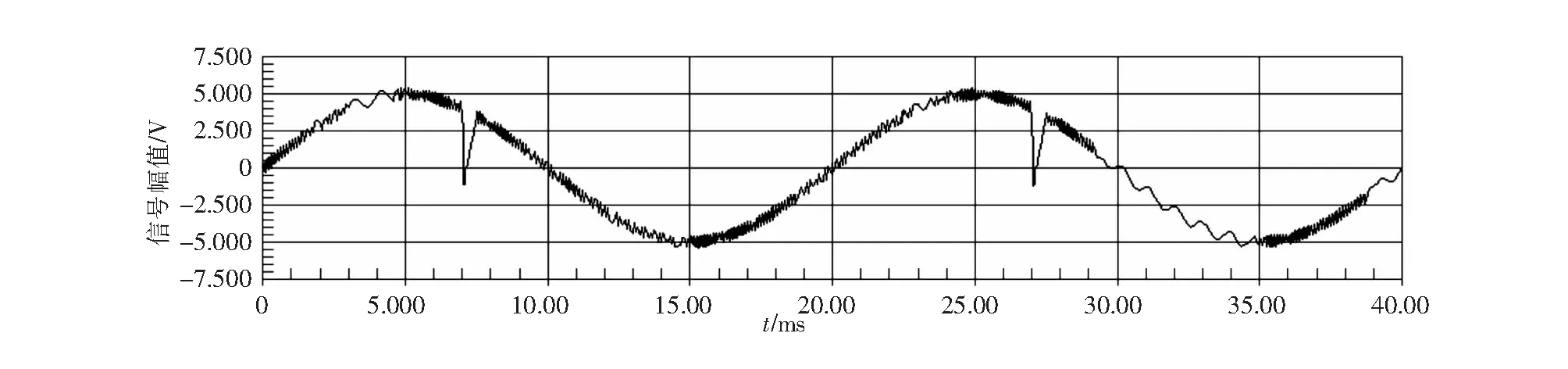
圖3 采集信號圖
圖4 一階濾波后信號圖
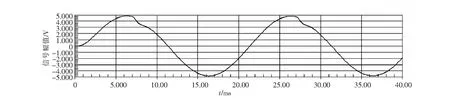
圖5 二階濾波后信號圖
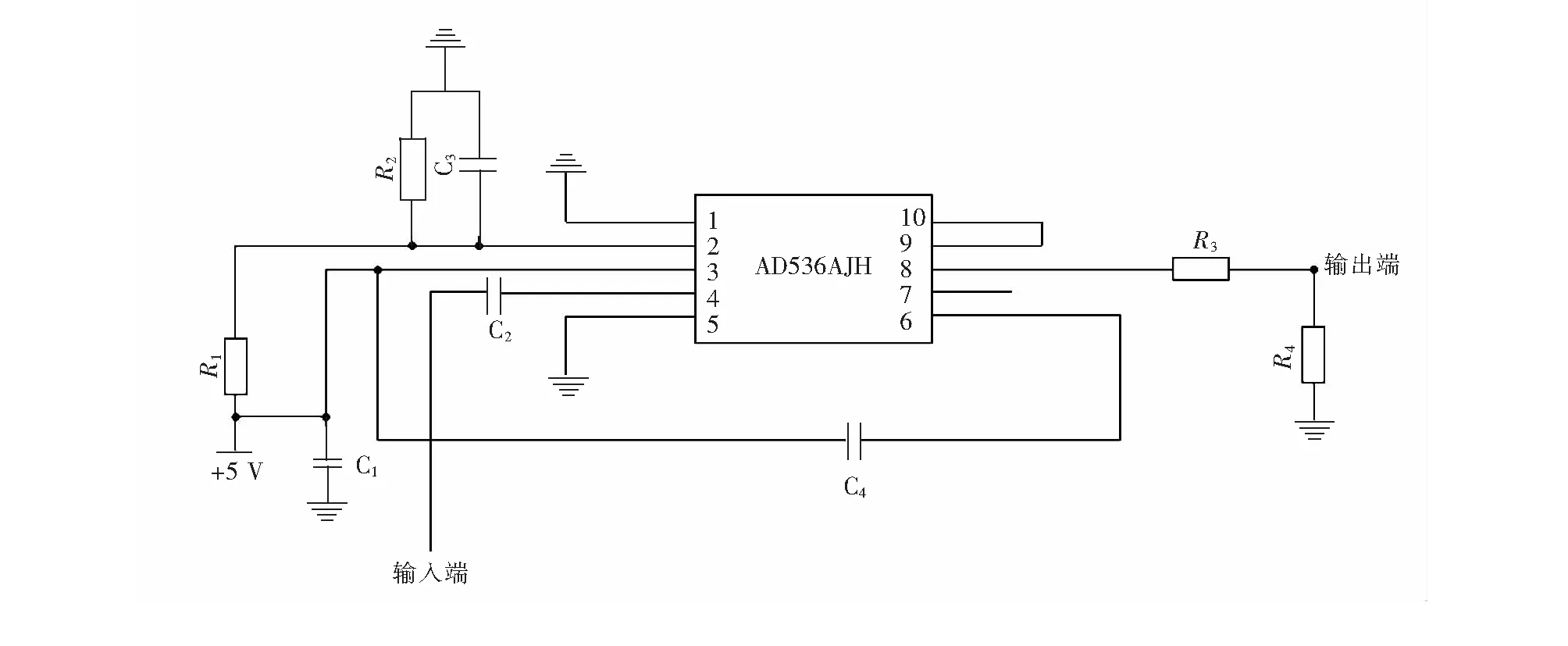
圖6 真有效值計算電路圖
圖6是以AD536芯片為核心搭建的有效值轉換電路,轉換后的有效值經過芯片第8腳輸出,經過電阻R3和電阻R4分壓后,轉換為DSP可以采集的3.3 V信號,輸入控制模塊。
3.3頻率采集方案
頻率采集使用周期測定法,通過計量基準計時脈沖信號在采集信號一個周期內通過的數量,獲得采集信號的周期,同時也得到了頻率。DSP具有檢測方波波形上升沿和下降沿變換功能,將采集信號通過過零電路轉換為方波,被DSP控制模塊捕捉,同時計數通過計時脈沖數量,就可以換算出信號的頻率:
其中,f為換算出的信號頻率,t1為第一次捕捉到上升沿的基準時間點,t2為第二次捕捉到上升沿的基準時間點,t2-t1為DSP 2次捕捉點的基準時間計數間隔,tbase為計數器單步運行周期。
過零電路采用LM339比較芯片,電路圖見圖7。LM339實際為電壓比較芯片,2個輸入端可分別接入參考信號電壓和采集信號電壓,采集電壓高于參考值時,輸出高電平;采集電壓低于參考值時,輸出低電平。參考信號為零時,即為過零比較電路,波形圖見圖8,U1為輸入信號,U2為經過過零比較電路后輸出的方波,可以用DSP自帶的捕捉端口直接采集上升沿或下降沿,通過對基準時間的計時,獲得變換的時間差,計算出相應的頻率。
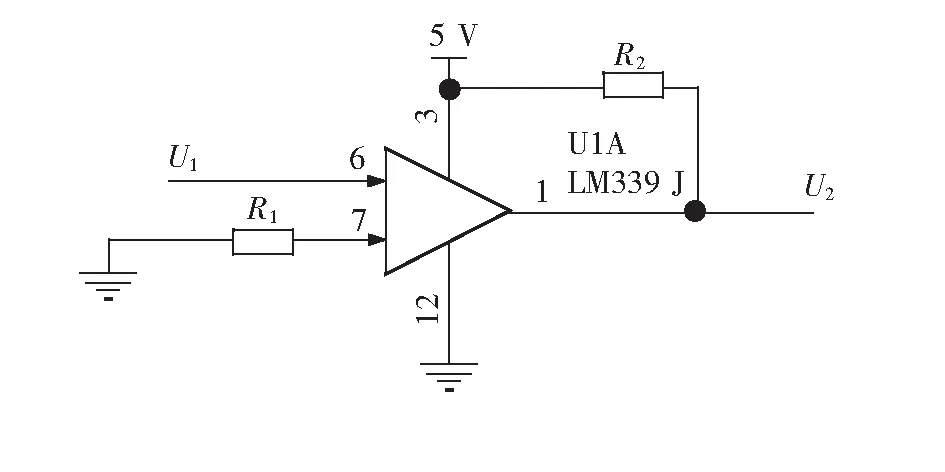
圖7 過零比較電路圖
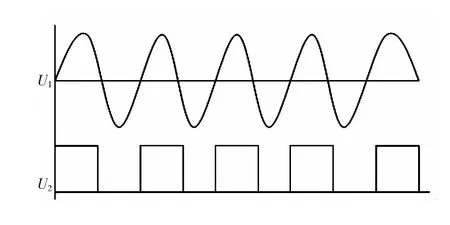
圖8 過零比較波形圖
3.4相位差
測量相位差主要獲得電壓電流間的相位角,進而計算獲得電站的功率因數。計算功率因數的公式為:
其中,cosφ功率因數,φ為相角,T為周期,t為時間差。
實際中將采集到的電壓信號和電流信號通過過零比較電路,轉換為下圖中的同頻方波信號,通過異或門電路的比較,得到電壓電流差值的方波信號和頻率測定的方法一樣,通過DSP的檢測方波變換功能,獲得信號相異的信號方波,進行換算成電壓電流信號的相位角和功率因數,具體波形圖如圖9所示,VU為電壓方波信號,Vi為電流方波信號,經過異或門電路后,輸出Vo為相角波形信號,通過DSP的捕捉腳CAPx連續捕捉異或門輸出波形信號的上升沿和下降沿時刻,將兩者的時間差再轉化成角度,就可以獲得相位差。
4 結束語
隨著信息技術和集成芯片技術的進一步發展,機艙無人值守逐步成為現實,實時準確的監控設備在船舶中的得到了廣泛的應用。在本設計基礎上設計的船舶電站監控系統將國外昂貴的設備實現國產化、廉價化,為船舶設計進一步集成化、網絡化發展提供有力的支持。同時在其他領域如太陽能發電、潮汐發電、風力發電等新能源領域也有廣泛應用前景。

圖9 相位差波形圖
[1] 王克廷.船舶電站集散型微機實時監控系統的設計與研究[D].大連:大連海事大學,1990.
[2] 劉和平,王維俊,江渝,等.TMS320LF24XDSP C語言開發應用[M].北京:北京航空航天大學出版社,2002.
[3] 劉宗得,陳定先.船舶電站及自動化裝置[M].北京:科學技術文獻出版社,1992.
[4] 黃建新.船舶電站微機保護及自動準同步并車系統研究[M].大連:大連海事大學,2006.
[5] 解源,楊國豪.船舶電站自動并車裝置信號檢測原理與實現[J].傳感器技術,2001,20(3):42-44.
This article mainly focuses on the methods of collecting signal from ship power station,including voltage,current,frequency detection and phase angle,which can be transmitted to digital signal processor(DSP) to make the state-judgement and operation more convenient more real-time and more automatically.
ship power system;digital signal processor;signal collection
U672
10.13352/j.issn.1001-8328.2014.04.009
于振國(1973-),男,天津人,工程師,大學本科,主要從事船舶與海洋石油電氣、儀表工程設計、技術咨詢工作。
2014-04-02
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國船檢(2017年3期)2017-05-18 11:33:09
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00