現代三維工業測量系統研究進展及發展趨勢分析
2014-11-25 06:24:46崔希民馬開鋒黃桂平
華北水利水電大學學報(自然科學版) 2014年3期
崔希民,馬開鋒,,黃桂平
(1.中國礦業大學(北京)地球科學與測繪工程學院,北京100083;2.華北水利水電大學,河南 鄭州450045)
近年來,隨著現代工業的發展,尤其是以數字制造為核心的先進制造技術的迅猛發展,要求對工業精密測量技術進行革新.其中測繪領域的現代三維工業測量系統就是應用廣闊、測量精度高、方便快捷的一種測量新技術.工業測量是指在工業生產和科研各環節中,依據設計圖紙和規范的要求,采用高精度(精度達亞毫米±0.1 mm,甚至更高達到±0.01 mm ~±0.05 mm)的測量方法和技術對三維部件、工件、整機或結構進行檢查、檢核、調整、裝配、安裝和維護;包括為了獲取三維坐標,進行準直、水準、幾何形狀擬合、質量保證審核、靜態/動態變形監測等而進行的精密測量[1].
由于測量目標與測量手段的多樣性,導致三維工業測量與常規工程測量的區別顯著. 常規工程測量以土木工程等露天目標的空間坐標和其他幾何尺寸為主要測量目的,以常規測角測距儀器和全球定位系統(GPS)等為主要測量設備,點位絕對精度與測量頻率較低,作業距離較長,目標物尺寸較大;而三維工業測量大多以車間或實驗室內或室外特定的設備、模型、工業產品或其零部件的幾何量或物理量等為主要測量目的,采用多達10 余類測量手段的理論、方法和設備,點位絕對精度與測量頻率高,作業距離一般較短,目標幾何尺寸一般相對較小[2]. 這里主要指用于精密定位的三維坐標測量系統.
1 三維工業測量系統研究進展
根據所使用的主要傳感器的不同,三維工業測量系統分為三坐標測量機、經緯儀測量系統、全站儀測量系統、激光跟蹤測量系統、激光掃描測量系統、關節式坐標測量機、室內GPS、數字近景工業攝影測量系統等八大類.目前三維工業測量系統的一個最新發展趨勢是多個傳感器的集成和綜合使用.
1.1 三坐標測量機
三坐標測量機是指在一個三維空間內,對幾何形狀、長度及圓周分度等進行測量的儀器,它是傳統通用三維坐標測量儀器的代表,通過測頭沿導軌的直線運動來實現精確的坐標測量[3]. 具有測量準確、效率高、通用性好的優點;但對測量環境要求高、不便攜、測量范圍小,而且屬于接觸式測量方式、不易對準特征點. 目前,Brown & Sharpe 公司生產的LAMBDA SP 型龍門式巨型坐標測量機的最大測量空間達到了3 m×10 m×2 m,如圖1所示.

圖1 LAMBDA SP 型CMM
1.2 經緯儀測量系統
經緯儀測量系統是由兩臺或兩臺以上的高精度電子經緯儀(如Leica 的T3000,水平角和垂直角的測角精度皆為0.5″)構成的空間角度前方交會測量系統,原理如圖2所示.它是在大尺寸測量領域應用最早和最多的一種系統,由電子經緯儀、基準尺、通訊接口和聯機電纜及微機等組成[4],如圖3所示.
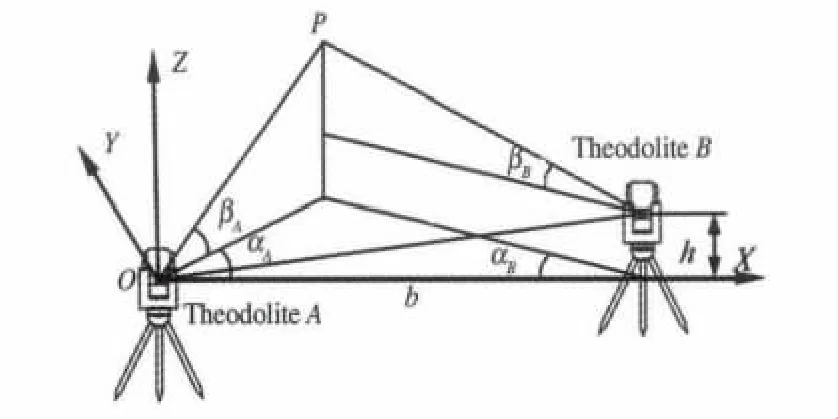
圖2 經緯儀坐標測量原理
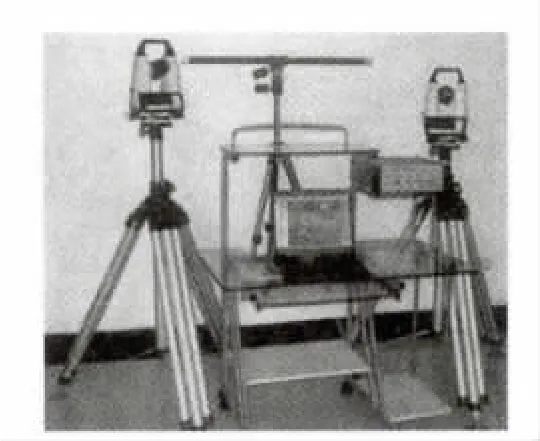
圖3 MetroIn 經緯儀測量系統
經緯儀測量系統的優點是光學、非接觸式測量,測量范圍較大(2 m 至幾十米),測量精度比較高,在20 m 范圍內的坐標精度可達到10 μm/m;其不足是一般采用手動照準目標,逐點測量,效率低、自動化程度不高. 但目前已出現了帶馬達驅動的經緯儀(如Leica 的TM5100A),在重復測量時不需手動瞄準目標、實現了自動化測量[3]. 如鄭州解放軍測繪學院推出的國產化的商業系統MetroIn[5].
1.3 全站儀測量系統
全站儀是一種兼有電子測角和測距的測量儀器.其坐標測量采用空間極(球)坐標測量的原理,如圖4所示,它是測繪行業應用最廣和最通用的一種坐標測量機.
早在1990年之前,瑞士Leica 公司就推出了商業化系統PCMSplus,其全站儀采用TC2002,測角精度為0.5″,測距標稱精度為1 mm+1 ×10-6(D 為測距,單位為km).目前,被稱為測量機器人的帶自動照準和自動識別目標(ATR)技術的全站儀(如TDA5005,如圖5所示)已出現并廣為應用[6].
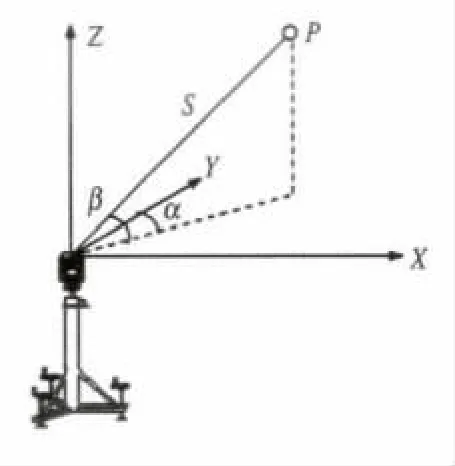
圖4 球坐標測量原理
圖5 TDA5005 全站儀
全站儀坐標測量系統只需單臺儀器即可測量,因此儀器設站非常方便和靈活,測程較遠,特別適合測量范圍大的情況,Leica 的TDA5005 構成的系統在120 m 范圍內使用精密角偶棱鏡(CCR)的測距精度能達到0.2 mm;日本SOKKIA 公司推出了MONMOS 全站儀測量系統,采用NET1200 全站儀在100 m范圍內對反射片測量精度優于0.7 mm. 由于一般必須要合作目標(如棱鏡或反射片)才能測距,所以它無法直接測量目標點;測距固定誤差的存在,使其在短距離(<20 m)測量時相對精度較低.雖然目前已出現了無需棱鏡測距的全站儀(如Leica 的TCR1101),但測距精度均低于3 mm.
1.4 激光跟蹤測量系統
激光跟蹤測量系統是由單臺激光跟蹤儀構成的球坐標測量系統,其測量原理和全站儀一樣,僅測距方式(單頻激光干涉測距)不同[7].測量時又可分為單站距離法、角度法和多站純距離法,如圖6所示.
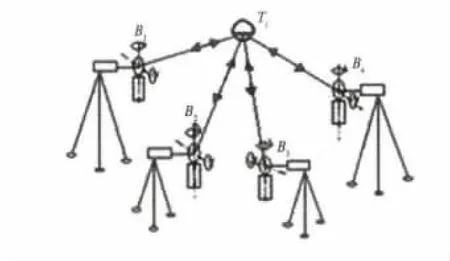
圖6 多站距離交會測量
Leica 公司于1990年就推出了第一代商用激光跟蹤測量系統SMART310,美國的API 公司和FARO公司也相繼推出了各自的系統,如圖7所示.

圖7 商用激光跟蹤測量系統
由于干涉法距離測量的精度高、速度快,因此激光跟蹤儀的整體測量性能和精度要優于全站儀. 在測量范圍內(一般<50 m),坐標重復測量精度達到5 ×10-6(即5 μm/m);絕對坐標測量精度達到10 ×10-6(即10 μm/m). 但在單項指標上,如測角精度比全站儀的要低,測量范圍也比全站儀小.
1.5 激光掃描測量系統
激光跟蹤測量系統具有測距精度高的特點,但是測距為相對測距,需要在跟蹤過程中保持激光束不能丟失,另外測距需要合作目標(反射器)配合.因此,是一種接觸式的測量系統,往往給測量帶來諸多不便.采用其他非干涉法測距方式可不需要合作目標,將這類系統稱為激光掃描測量系統.激光掃描儀的測距原理分為3 種:①脈沖法激光測距;②激光相位法測距;③激光三角法測距[8].
基于脈沖法測距的激光掃描儀精度較低,一般為毫米級,但其測程較長,如Leica 公司的HDS3000型激光掃描儀(最大測程100 m,測距精度4 mm,曲面建模精度優于2 mm,如圖8所示),主要應用于土木工程測量、文物和建筑物的三維測繪等領域.
相位法測距的精度和調制頻率有關,一般全站儀的測距頻率最高為50 ~100 MHz,但美國Metric Vision 公司推出的激光雷達掃描儀(Laser Radar Scanner)LR200 則達到100 GHz,它在10 m 距離上絕對距離測量精度可以達到0.1 mm,測量范圍為2 ~60 m,如圖9所示.

圖8 激光掃描儀HDS

圖9 激光雷達掃描儀LR200
基于激光三角法測距原理的掃描測量系統又稱結構光掃描儀(Structured Light Scanner). 以半導體激光器作光源,使其產生的光束照射被測表面,經表面散射(或反射)后,用面陣CCD 攝像機接收,光點在CCD 像平面上的位置將反映出表面在法線方向上的變化,即點結構光測量原理,如圖10 所示[8].
目前,世界上生產各種型號結構光掃描儀的廠家很多,如德國GOM 公司的ATOS、Steinbichler 公司的Comet 與Breuckmann 公司的optoTOP-HE 系列以及法國Mensi 公司的S10/S25 等. 法國Mensi公司的S10 掃描儀(圖11)掃描距離0.8 ~10 m,掃描精度優于0.2 mm,三維建模精度優于0.05 mm,圖12 是S10 掃描某坦克后得到的實體三維點云.

圖10 激光三角法測距原理示意圖

圖11 Mensi 的S10 激光掃描儀
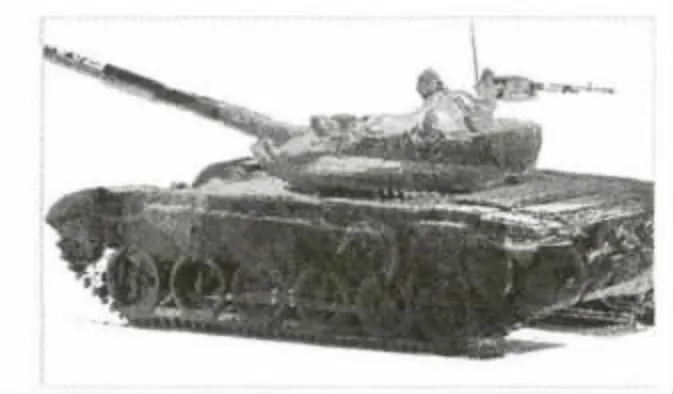
圖12 坦克的三維點云圖
激光掃描儀可以獲取海量的點云數據,尤其適用于實體的三維建模,其不足之處在于無法對某一特定的點進行精確測量.
1.6 關節式坐標測量機
關節式坐標測量機是一種便攜的接觸式測量儀器,對空間不同位置待測點的接觸實際上是模擬人手臂的運動方式.儀器由測量臂、碼盤、測頭等組成,如圖13 所示.各關節之間測量臂的長度是固定的,測量臂之間的轉動角可通過光柵編碼度盤實時得到,轉角讀數的分辨力可達1.0″,測頭功能同三坐標測量機,甚至可以通用.

圖13 關節式坐標測量機
關節式坐標測量機利用空間支導線的原理實現三維坐標測量功能,它也是非正交系坐標測量系統的一種[9].和三坐標測量機相比,關節式坐標測量機的測頭安置非常靈活,和其他光學測量系統比較,它不需要測點的通視條件,因此在一些測點通視條件較差的情況下(隱藏點)非常有效,例如汽車車身內點的測量等.但由于關節臂長的限制,它的測量范圍有限(最長可以到4 m),但可以采用“蛙跳”的方法(公共點坐標轉換法)或附加擴展測量導軌支架的方法來擴大其測量范圍.
目前生產關節式坐標測量機的廠家較多,主要有美國Faro 公司和ROMER 公司,德國的ZettMess公司、意大利的Garda 公司等.
有些廠家正在采用在其測頭上附加小型結構光掃描儀來實現對工件的三維快速掃描,稱為激光掃描測量臂.這種系統集接觸式與非接觸式系統優點于一體,圖14 是Faro 公司的產品ScanArm.

圖14 激光掃描測量臂ScanArm
1.7 室內GPS
所謂室內GPS 是指利用室內的激光發射裝置(基站)不停地向外發射單向的帶有位置信息的紅外激光,接收器接收到信號后,從中得到發射器與接收器間的兩個角度值(類似于經緯儀的水平角和垂直角),在已知了基站的位置和方位信息后,只要有兩個以上的基站就可以通過角度交會的方法計算出接收器的三維坐標,如圖15 所示. 基站的位置和方位通過光束法進行系統定向后完成,這樣不需要已知控制點,只要一個基準尺度就可以了.

圖15 Arc Second 公司的室內GPS
與GPS 不同的是,室內GPS 采用室內激光發射器來模擬衛星;它不是通過距離交會,而是用角度交會的方法.與經緯儀系統不同的是,它不是通過度盤來直接測量角度,而是通過接收紅外激光來間接得到角度值,因此不再需要人眼去瞄準待測點.
美國Arc Second 公司生產的室內GPS(圖15),其測量速度達到了20 Hz,測量空間范圍從幾米到幾百米,如果采用4 個以上的基站,10 m 測量空間內測量精度可以達到0.125 mm.
1.8 數字近景工業攝影測量系統
數字近景工業攝影測量是通過在不同的位置和方向獲取同一物體的2 幅以上的數字圖像,經計算機圖像匹配等處理及相關數學計算后得到待測點精確的三維坐標.其測量原理和經緯儀測量系統一樣,均是三角形交會法.
數字近景工業攝影測量系統一般分為單臺像機的脫機測量系統、多臺像機的聯機測量系統,如圖16 所示.此類系統與其他類系統一樣具有精度高、非接觸測量和便攜等特點.此外,還具有其他系統所無法比擬的優點:測量現場工作量小、快速、高效和不易受溫度變化、振動等外界因素的干擾.國外的生產廠家和產品很多,如美國GSI 公司的V-STARS系統(圖17)、挪威Metronor 公司的Metronor 系統(圖18)和德國AICON 3D 公司的DPA- Pro 系統(圖16(a))等.
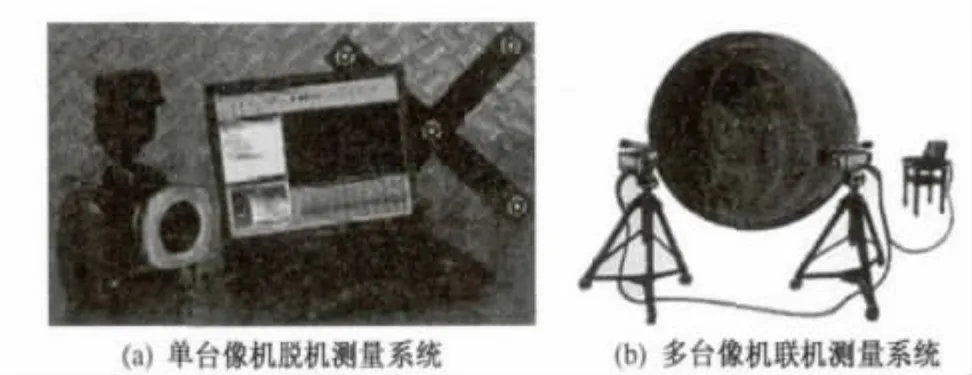
圖16 數字近景工業攝影測量系統

圖17 V-STARS 系統
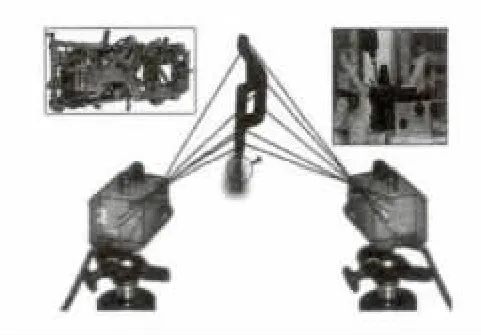
圖18 Metronor 系統
2 三維工業測量系統的應用領域
2.1 大型工業目標方面
三維工業測量系統主要用于(航天)飛機的設計、仿制、改型等的外形測量以及安裝、調試過程中的檢測、定位測量;轎車外殼或船(艇)體外形的設計、仿制或改型過程中的測量工作;還用于油船艙體容積的測定,船模在試驗池內的性能檢測,風帆外形動態性能測試,大型船艦推進器葉片的外形測定,艦船主設備的安裝,船體靠泊時對碼頭總壓力的間接測定等;以及大量人工構筑物內結構測量,如鐵路、公路、海底或水下隧道、城市地下鐵道、礦山大型巷道和采空區、各類地下軍事或防空工程、艦艇或飛機洞庫、油庫與彈藥庫、水電站的排水泄水洞、排沙洞和壩內結構、大型管道、窟室及亭臺樓閣的內結構、各類運輸車船的內結構、裝載油氣化學品的倉體罐體等;風洞實驗室與水工實驗室中運動目標的動力學參數測定等[2].
2.2 在線快速檢測方面
采用三維工業測量系統可進行工業生產流水線(傳送帶)上各種產品的在線快速檢測,如快速檢測光纖的直徑、光盤的厚度、芯片導體部分的厚度與斑痕、標識符的印刷質量、防偽標志的遺漏、藥片尺寸一致性、矽片寬度與厚度、卷煙松緊度、人造大理石色彩一致性、玻璃平整度、精密軸承加工質量等,使得三維工業測量成為工廠車間生產的必須環節.
2.3 動態目標測量方面
三維工業測量系統可用于轎車的破壞性試驗、新型飛機起飛著陸運動狀態測定、火箭發射狀態、空拋物體或艦船模型或發動機運動軌跡、精密機床熱變形、風動試驗目標姿態、土石方爆炸三維記錄、炮彈出膛速度、兩飛船間“接軌”過程控制等.
3 現代三維工業測量系統發展趨勢
由于觀測目標的多樣性與復雜性,而單一觀測方法又存在一定的局限性,隨著計算機科學和信息技術的發展,面向復雜應用背景的多傳感器系統大量出現,由此產生了一門新興學科——多傳感器信息融合(Multisensor Data Fusion,MSDF). 信息融合是針對使用多個和/或多類傳感器的系統問題進行的一種信息處理的新方法,又稱為多源關聯或合成、傳感器混合或多傳感器數據融合. 數據融合是利用計算機技術對按時序獲得的若干傳感器的觀測信息在一定規則下加以自動分析、優化綜合,以完成所需的決策和估計任務而進行的信息處理過程[10].多傳感器系統比單傳感器系統在可量化的狀態估計性能上有很大優越性,比如包括提高了系統的可靠性與穩定性、擴大了空間覆蓋范圍、減少了信息的模糊性及提高了空間分辨力等. 由于多傳感器系統的復雜性增加,相應會產生成本增高,設備的尺寸、重量、功耗等物理因素隨之增大等不利因素.因此,數據融合系統的最終目標是對觀測對象的形勢狀態給出精確的評估,以便對觀測對象采取適當的應對措施,使得數據融合系統達到最優.
3.1 數據融合的模型框架
在應用數據融合的眾多研究領域中,為統一起見,軍事組織于1986年在美國成立了實驗聯合理事會數據融合工作組,并發布了一部數據融合詞典和數據融合處理模型.該模型適用于各個領域,包括如下處理步驟[10-11].
1)原始信息.包括安置在各待融合點的傳感器或分布式傳感器以及操作者或數據庫的先驗信息.
2)信息預處理.對處于不同融合階段的數據進行預選和分配,避免融合處理器的輸入數據過于擁塞以及適時提供相關數據.
3)對象處理(第1 級處理).對觀測對象的信息加以融合,完成4 個基本功能. ①數據整合:將數據變換到一組通用的坐標系和單位制下;②跟蹤:提取位置、速度及其他狀態特征;③數據聯合:將數據與對象關聯;④鑒別:提取對象確認評估信息.
4)形勢處理(第2 級處理).嘗試通過分析背景信息和含義,推理對象、事件以及先驗信息的關系.
5)預測處理(第3 級處理).在評估當前形勢的基礎上推理未來.
6)過程信息處理.這是相對其他步驟的中間輔助過程,通過監控系統性能,提取可用于提高系統性能的信息來控制融合過程,并按系統目標要求操作傳感器和分配資源.
7)數據庫管理.融合系統是否成功的關鍵組成部分,包括:數據的恢復、存儲、存檔、壓縮、相關查詢和數據保護等.
8)人機界面. 提供一種人機信息交換渠道,操作者到計算機的通信方式,如操作者發出索取信息指令并對融合系統生成的結果做出主觀評價等,而計算機到操作者的通信主要包括警報和結果顯示.
3.2 數據融合系統的體系結構
在多傳感器組成的系統結構中有著不同的配置方式,其結構形式取決于其應用背景.其中一種為串級或前后式拓撲結構形式,而另一種則為不同的傳感器同時觀測的分布式網絡拓撲結構或并行結構的最普通的形式.
由于所采集數據可以在信號處理鏈的各個階段進行融合,即融合點所在的數據水平是關鍵點,一般廣泛采用的是數據級、特征級和決策級三級模型.數據級融合是直接綜合來自各個傳感器的原始信息,即可獲得最精確的結果;但要求所用的傳感器是同類的,即觀測到的數據具有某種類似并可以實現融合;同時全部傳感器的觀測數據都必須傳輸到一個集中處理設備上,意味著需要一個較大的傳輸帶寬.特征級融合是將從原始數據中提取的特征向量加以綜合,雖然可以降低數據傳輸要求,但由于特征向量提取時丟失了有效信息,從而可能降低了融合結果的精度.決策級融合是每個傳感器均基于自己的觀測做出決策,將這些決策集中起來生成最終結論;由于該過程中信息被極大壓縮,融合精度是3 種方式中最低的,但其優點是可大大降低傳輸帶寬要求,并可實現不同類型傳感器的融合[10].
在實際融合系統設計中,并不限定僅僅使用其中某一模型,而是可以像搭積木一樣設計整套融合系統.雖然低水平的融合綜合了更多傳感器信息,但融合水平越低,系統噪聲也越大,但適當地加入反饋,有助于提高系統性能.
4 結 語
隨著國民經濟的發展,越來越多的工業部門認識到了三維工業測量系統的優點,并在各種規模巨大的工程建設中得到了廣泛的應用. 不管是測繪部門還是航空、航天、汽車、船舶工業等部門均在引進并使用三維工業測量系統;如大型衛星天線的組裝、汽車制造工業與大飛機制造過程中產品的安裝和檢測等等.但引進不等于自主、制造不同于創造,因此開展這一領域的理論和學術研究,開發相應的國產化三維工業測量系統,更好地為系統的精度檢驗和技術服務己成為當務之急.
[1]李廣云.工業測量系統最新進展及應用[J].測繪工程,2001,10(2):36-40.
[2]馮文灝.關注我國“工業測量”事業的發展[J].地理空間信息,2004,2(6):5-8.
[3]黃桂平.數字近景工業攝影測量關鍵技術研究與應用[D].天津:天津大學,2005.
[4]李廣云,倪涵,徐忠陽. 工業測量系統[M]. 北京:解放軍出版社,1994.
[5]黃桂平,葉聲華,李廣云,等.經緯儀大尺寸柔性三坐標測量系統的開發與應用[J]. 儀器儀表學報,2002,23(3)增刊:607-610.
[6]范百興.高性能全站儀的研究及其在動態測量中的應用[D].鄭州:解放軍信息工程大學測繪學院,2004.
[7]Lau K,Hocken R J,Haight W C.Automatic laser tracking interferometer system for robot metrology[J].Precision Engineering,1986,8(1):3-8.
[8]孫長庫,葉聲華.激光測量技術[M].天津:天津大學出版社,2001.
[9]李廣云.非正交系坐標測量系統原理及進展[J].測繪信息與工程,2003,28(1):4-10.
[10]文成林,周東華. 多尺度估計理論及其應用[M]. 北京:清華大學出版社,2002.
[11]Varshney P K. Multi-sensor data fusion[J]. Electronics &Communication Engineering Journal,1997,9(6):245-253.
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
北京測繪(2020年12期)2020-12-29 01:37:18
現代出版(2020年3期)2020-06-20 07:10:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
電測與儀表(2016年9期)2016-04-12 00:29:52