潛艇自動舵控制方法研究*
2014-11-28 09:39:28黃佳帥
艦船電子工程 2014年9期
黃佳帥
(92730部隊 葫蘆島 125000)
1 引言
潛艇作為一種能長時間在水下隱蔽機動的武器受到各國重視,而如何精準地控制航向和深度在很大程度上決定著潛艇生命力和戰斗力,這就要求舵手操作過硬,經驗豐富,精力集中,然而長時間在海上航行人員容易疲憊,并且人為操舵受到周圍環境影響較大,難以保證萬無一失,如果在潛艇上裝備技術成熟的自動舵,那么潛艇戰力將大大提升。
2 自動舵的發展現狀及趨勢
自上世紀70年代起,國內一些科研院所、高校開展自動舵的理論與開發工作,并取得了不少成果,一些航海儀表廠家也獨立或與研究所、高校合作開展了自動舵的試制和生產,其產品以模擬PID舵為主。目前國外市場上有多種成熟的航向舵、航跡舵產品,其控制方法大多為比較成熟的自適應控制。目前美國、俄羅斯等發達國家已經在潛艇上運用了自動舵技術,并且使用效果較理想[1]。
目前自動舵的發展向著以下幾個方向發展:
1)實現實時綜合數據船橋系統功能。
2)整個系統采用模塊化結構。
3)系統人機界面全部菜單化,采用游戲桿或跟蹤球等進行操作。
4)采用雙羅經、雙計算機控制系統配置以提高可靠性和安全性。
5)配備電子海圖顯示和信息系統。
6)中央控制臺按照設備功能集成的原理,把“監督(雷達,ECDIS)”和“控制(航跡舵)”等集成在一起。
7)采用航行優化和安全系統。它能綜合幾天的天氣預報、海況、船舶經濟性和計劃時間等信息,制定航行策略。
3 自動舵主流控制方法
3.1 PID控制
PID控制是最早發展起來的控制策略之一,由于其算法簡單、魯棒性好、可靠性高等優點,被廣泛應用于工業過程控制。當用計算機實現后,數字PID控制器更顯示出參數調整靈活、算法變化多樣、簡單方便的優點[2]。將偏差的比例(P)、積分(I)和微分(D)通過線性組合構成控制器,對被控對象進行控制,這就是PID控制器。PID控制器系統原理框圖如圖1所示[3]。
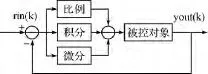
圖1 PID控制器系統原理框圖
常規PID控制系統一般只適用于線性系統,且不能根據實際情況在線調整增益系數,致使其不能滿足在不同的偏差和偏差變化率下對控制器的PID參數進行自整定的要求,從而影響系統的控制精度和系統的穩定性。利用模糊控制規則在線對PID參數進行修改,便構成了自適應模糊PID控制器。
目前較成熟的PID自整定方法有:
1)經驗公式法:Ziegler-Nichols設定方法、ISTE最優設定方法和臨界靈敏度法;
2)仿真試驗法。
Ziegler-Nichols設定方法:受控對象大多可近似用一階慣性加純延遲環節來表示,傳遞函數為

對于典型PID控制器:

Ziegler-Nichols整定公式:
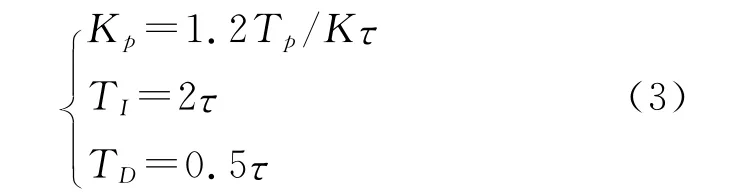
實際應用時,通常根據階躍響應曲線(圖2),人工測量出K、Tp、τ參數,然后按式(3)計算kp、TI、TD。
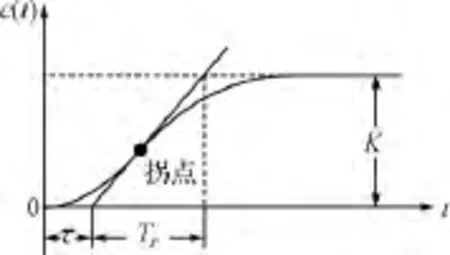
圖2 階躍響應曲線
3.2 自適應控制
目前船舶操縱中提出的自適應方法,主要有自適應PID設計法、隨機自適應法、模型參考法、基于條件代價函數的自校正法、最小方差自校正法、變結構法、自線性二次高斯法等。
一般經典的控制方法運用有兩個前提:一是對象的模型是精確的、不變化的,且是線性的;二是操作條件、運行環境是確定的、不變的。實際上,一般的工業控制系統只是粗略、近似的滿足這些條件,這就導致了系統控制性不高。自適應控制是針對對象特性的變化、漂移和環境干擾對系統的影響而提出來的,其基本思想是通過在線辨識或通過某種算法使這種不確定或變化的影響逐漸降低,以至消除,并修正控制器自己的特性,以適應對象和擾動的動態特性變化。
3.3 智能控制
對有限維、線性、時不變的控制過程,傳統控制法是有效的,但實際船舶系統常具有不確定性、非線性、非穩定性和復雜性,很難建立精確的模型方程,甚至不能直接進行分析和表示。而根據人工操作者的處理經驗和正確的理解,就可有效地控制船舶航行,這就是智能舵。智能舵分為專家系統、模糊舵和神經網絡舵三種。
3.3.1 專家系統
專家系統是目前人工智能中最活躍、最有成效的一個研究領域,它由知識庫、數據庫、推理機、信息獲取、控制算法五部分組成。知識庫以適當形式存儲由專家提供的在某個領域的專門知識和經驗以及書本知識和常識,主要起到知識的存儲功能。數據庫存放專家系統當前工作已知的一些情況,用戶提供的事實和由推理得到的中間結果。推理機主要根據獲取到的輸入信息,利用知識庫中的知識模擬專家的思維過程,控制并執行對問題的求解。信息獲取指的是獲取由其閉環控制系統的反饋信息以及系統的輸入信息。控制算法是專家控制系統的直接控制部分,由推理機作出的決策通過控制機構付諸實現。專家系統PID舵控制系統結構圖如圖3所示。
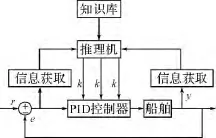
圖3 專家系統PID舵控制系統結構圖
3.3.2 模糊控制
模糊控制通常由模糊化、知識庫、模糊推理和非模糊化幾部分組成[4]。模糊化的作用是將參考輸入、對象輸出等精確量化成模糊量,是得到模糊推理中的前提;模糊推理是模糊控制的核心,具有模擬人的基于模糊概念的推理能力;非模糊化將模糊推理得到的控制量轉化為實際可用的精確量;知識庫包含了用于模糊化和非模糊化的各語言變量的模糊分割、隸屬函數等數據庫信息,以及用于模糊推理的一系列控制規則構成的規則庫,構造了模糊推理中的前提[5]。
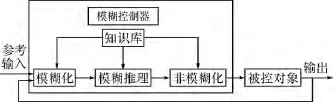
圖4 模糊控制器的基本結構圖
3.3.3 神經網絡控制
神經網絡是人工神經網絡的簡稱,它由若干個人工神經元(簡稱神經元)互聯組成網絡。神經網絡一方面受結構與特性的制約,另一方面受環境的影響,即神經網絡可通過自組織、自學習不斷地適應外界環境的變化,神經網絡的工作方式包括兩個階段[6]:
1)學習期:神經元間的聯接權值(和神經元非線性函數參數),可由學習規則進行調整,以使目標函數達最小。
2)工作期:聯接權值(和神經元非線性函數參數)不變,根據網絡的輸入得到相應的輸出。
神經網絡的模糊PID控制器結構框圖如圖5所示。
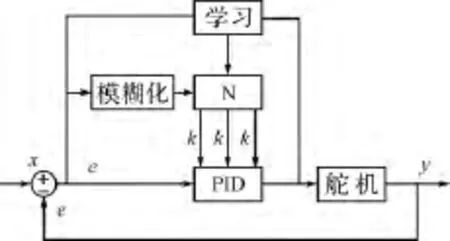
圖5 神經網絡的模糊PID控制系統結構
4 自動舵在潛艇中的應用
潛艇控制系統是一種慣性大、非線性的復雜控制系統。目前潛艇自動舵通常采用常規的PID控制保持定向或定深運動,自動舵舵原理簡圖如圖6所示。

圖6 自動舵原理簡圖
自動舵需要依賴精確的數學模型,而且控制參數確定后,僅能適應特定的環境條件,無法適應環境條件的變化。首先,當船舶的動態特性或外界條件發生變化時,控制參數需進行人工整定,若控制參數不合適,將導致控制效果變差,操舵幅度大,操舵頻繁,舵機損耗大,缺乏對船舶動態變化及海況變化的自適應能力;其次,對于高頻海浪干擾采取的高頻轉舵,將產生持續性偏航,致使航行精度降低,能量消耗加大。因此航向深度變化不大時,自動舵可以精準地控制船舶,保證航行安全,但在用舵頻繁或海區環境變化較大的情況下,自動舵將失去其優勢,取而代之的是人工舵,但是隨著科技的發展,如智能控制等先進控制方法的進一步完善,艦船全面實現自動舵將是一種大趨勢。
[1]程啟明,劉其明,王志宏.船舶自動舵控制技術發展研究[J].計算機自動測量與控制,2000(8):1-4.
[2]劉金琨.先進PID控制MATLAB仿真[M].第二版.北京:電子工業出版社,2004.
[3]康杰.基于MATLAB的模糊PID參數自整定仿真研究[J].儀表技術,2008(12):20-22.
[4]廖力達,王北戰,章運奇.自適應模糊PID控制器的研究與應用[J].建筑機械,2009(15):59-62.
[5]胡錦暉,胡大斌.PID參數模糊自整定控制器的設計與仿真研究[J].海軍工程大學學報,2005(1):97-100.
[6]霍星星,余婷.基于BP神經網絡的PID船舶自動舵[J].中國水運下半月,2013(12):165-167.
[7]梁利華,楊鵬,馬潔.模糊PID控制器在船舶實驗臺橫搖位置系統中的應用[J].船舶工程,2006(1):32-35.
[8]靖固,張科,孫玲玲.不完全微分PID控制的FPGA的研究[J].微計算機信息,2009(13):52-53.
[9]黃勇亮,盧曉春.船舶舵機的模糊PID控制[J].裝備制造技術,2009(7):34-35.
[10]紀玉榮.中小型軋鋼廠加熱爐溫度專家控制的應用[J].新技術新產品,2009(12):23.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年2期)2022-03-29 01:12:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
裝備制造技術(2019年12期)2019-12-25 03:06:46
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45