CTCS3級列控系統ATP防護曲線算法研究
2014-11-29 08:40:36王長林
鐵路計算機應用 2014年7期
譚 莉,王長林
(西南交通大學 信息科學與技術學院,成都 610031)
列車超速防護(ATP,Automatic Train Protection)安全制動模型是列車自動防護系統的核心,直接影響著列車行車間隔、運輸效率和行車安全。對ATP系統建模與ATP系統仿真實現的研究,從理論上,可以通過建立ATP系統模型,探索ATP系統的控車及防護機制。從實踐上,可以及時發現設計疏漏,縮短新產品的研制周期,進行設備參數優化設計。因此,對基于通信的列車自動防護系統關鍵算法的研究具有重要意義。
1 ATP系統分析
ATP 系統是確保列車安全運行的關鍵,它由軌旁設備和車載設備組成。車載設備結構如圖1所示,主要由ATP安全計算機(VC)、應答器信息接收模塊(BTM)、軌道電路接收模塊(STM)、制動接口單元、記錄單元、人機界面(DMI)、速度傳感器、BTM天線、STM天線等組成。
ATP車載設備根據地面設備提供的信號動態信息、線路靜態參數、臨時限速信息及有關動車組數據,生成控制速度和目標距離模式曲線,對列車行車安全進行防護,對安全設備或系統實行監控,實現超速防護、列車間隔控制、臨時限速、列車定位、車門控制和后退防護等功能。記錄單元對列控系統有關數據及操作狀態實時動態記錄。
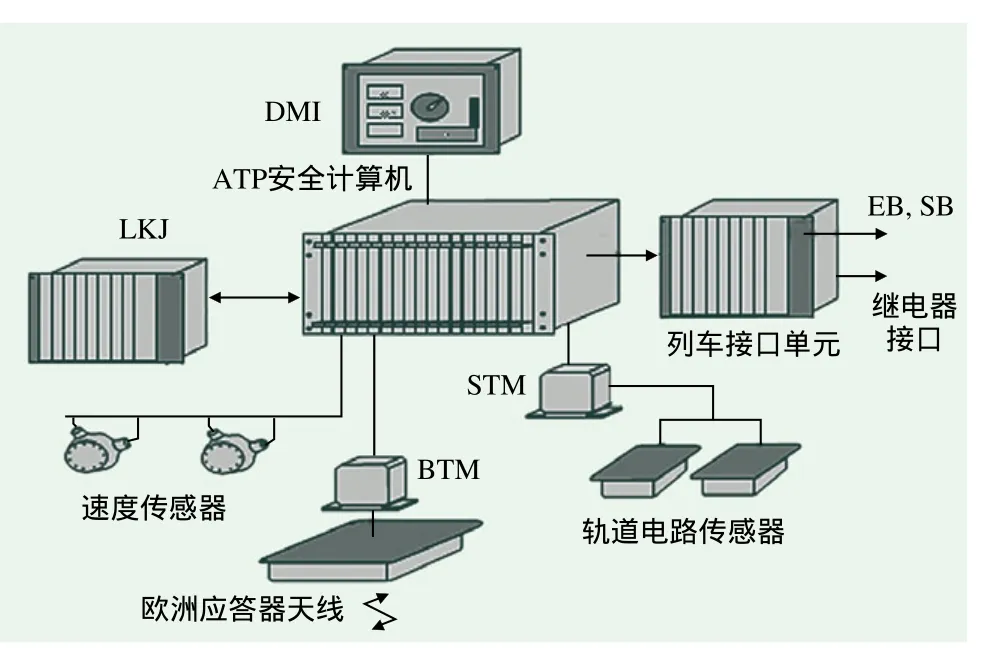
圖1 ATP車載設備系統結構
2 ATP速度防護模型
ATP防護曲線是根據列車制動性能、線路條件等因素采用列車牽引計算得到的。通過列車安全制動曲線,車載ATP 能夠實時地監控列車的運行速度,保障列車的安全運行。在CTCS3級列控系統中,ATP防護曲線采用目標-距離模式,目標-距離模式曲線的算法基礎就是列車安全制動距離的計算。在列車制動過程中,速度在連續變化,故列車制動合力也不斷變化,即列車加速度也是連續變化的,因此采用取步長的辦法進行計算。取步長的辦法可分為時間步長、距離步長,速度步長。列車在整個制動過程中的制動加速度可表示為:

式(1)中:f為列車制動力(N/kN),w為列車單位基本阻力(N/kN),wi為單位坡道附加阻力(N/kN),wr為單位曲線附加阻力(N/kN),ws為單位隧道附加阻力(N/kN)。
因為輪對、電機等回轉物體會消耗一部分動能,轉動部分消耗的動能一般按列車功能的比例計算,該比例值稱為回轉質量系數γ。這樣列車制動加速度修正為:

根據圖2所示,取時間為步長的方法就是把整個列車制動的過程細分為若干個時間段?t,在?t時間內,列車速度恒定,由此列車的制動合力是一個常數。取其中一段?t,根據運動學公式,可得在?t時間內,列車的速度增量?vi為:
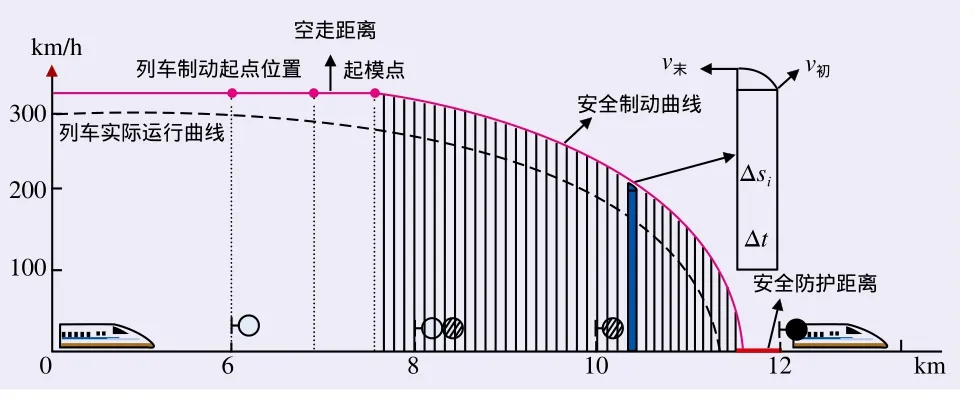
圖2 ATP安全制動曲線計算原理

列車的距離增量?si為:

式(4)中:fi為列車在?t時間內的制動力(N/kN),v初為列車制動初速度(m/s),v末為列車制動末速度(m/s),γ為回轉質量系數。
然后將這些在?t 時間內變化的位移?si疊加,即可得到列車安全制動距離S:

而把所得到的?si、?vi連接起來則可得到V–S圖,即目標-距離模式的ATP安全制動曲線。由于離散計算總是存在一定的誤差,但是當 取足夠小時,列車安全制動曲線的計算誤差可控制在0.5%以內,能夠達到工程要求。
由于列車在進行緊急制動時需要施加最大制動力,即列車從一開始就施加了空氣制動,故車載ATP在計算列車緊急制動曲線(EBI)時需要考慮列車牽引切斷、制動響應的時間,即空走時間。
列車的制動距離長度則為列車安全制動距離和列車空走距離之和,即:

式(6)中:v為列車制動起始速度(km/h),t空走為列車空走時間。
3 安全制動曲線步長選取的分析
列車超速防護曲線是按步長計算,不能恰好算到目標值處,設計時給出一個允許誤差ξ,當列車速度值在誤差ξ范圍內,則等同列車速度已滿足目標值vmax,即為迭代計算的終止條件。在列車安全制動距離的計算中,步長的選取辦法可分為時間步長?t,距離步長?s,速度步長?v。在計算過程中,選擇不同參數的步長或者步長的長短取得不同,計算結果的精確度和收斂性都會是不同的。
3.1 變步長?t法
在牽引計算中,通常選擇?t為步長,而為了提高計算結果的精度,采用變步長法進行計算,步長?t取值通常為50 ms~1 000 ms 間,開始時速度比較小,步長取值較大,然后隨著速度增大,步長逐漸縮小。如圖3 所示,其中a為牽引加速度,f(?t)為步長?t的函數,隨著速度大小的變化, ?t將取不同的值。
根據流程圖(如圖3所示)分析,如果列車速度值在循環中跨過允許誤差區間,就需要試湊函數縮小步長?t,使得速度值可以被捕捉到。該方法的缺陷在于試湊需要將計算回滾,將不利于仿真幀穩定和時間同步。而定步長法中,往往將步長設計得非常小,如0.01 s,這樣看似精確且不需要試湊,但是在列車運行的某些階段,如以最大牽引力運行的牽引初始階段,非常小的步長顯然是沒必要的; 其次,如果此時允許誤差值取得不恰當,則列車是以接近允許誤差的下限值在運行,實際上就是列車還沒有達到最大值就開始準備制動了,這不利于提高運行效率。所以為了滿足必要的精確度和運行效率的要求,需要根據列車運行速度的大小選取合適的步長。
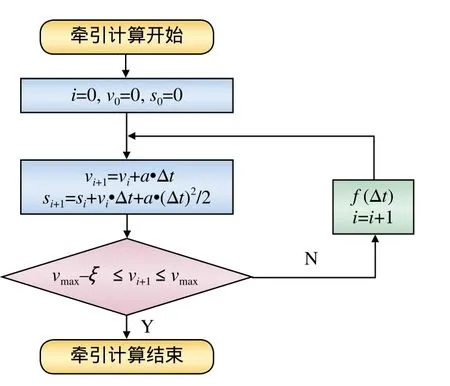
圖3 牽引計算流程圖
3.2 選取不同的步長? t ,? v ,? s法
以CRH3型動車組常規制動作為實例,假設在無坡度,無隧道和彎道的條件下,利用VC仿真計算,當列車接近停車點,取v=7.2 km/h時,a=0.6 m/s2,當列車接近制動點,取 v=300 km/h時,a=1.7 m/s2。
當選取時間為步長時,假設取?t=0.5 s,根據運動學公式:?v= ?t?a,?s=(v2末–v2初)/(2?a)可知:v=7.2 km/h時,計算得?v=0.3 m/s, ?s=1.1 m。v=300 km/h時,計算得 ?v=0.85 m/s,?s=41.7 m。
當選取速度為步長時,假設取?v=3 m/s,根據運動學公式:?t=?v/a,?s=(v2末–v2初)/(2?a)可知:v=7.2 km/h時,計算得?t=5 s,?s=17.5 m。v=300 km/h時,計算得?t =1.76 s,?s=147.1 m。
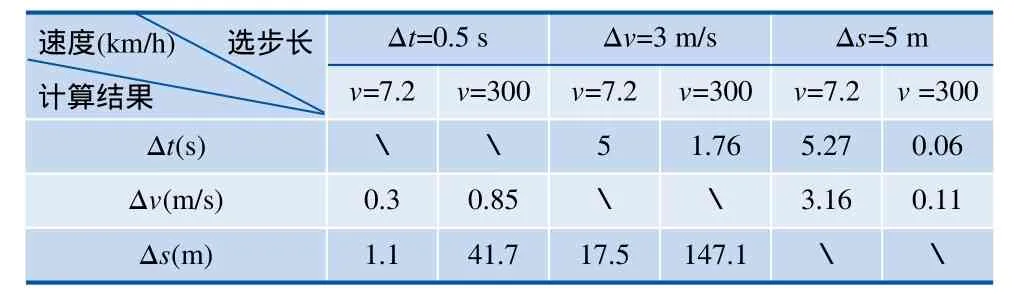
表1 不同步長參數下牽引計算的精度
比較3種取法的結果可知,選取時間為步長的方法,在停車點附近的計算精度較高,但是在制動點附近的計算精度比較差。選取速度為步長的方法,在加速度較大時計算精度較高,在停車點附近的精度較差,容易造成停車點不準確。而選取距離為步長時,在速度較大的情況下,計算精度較高。
考慮到在列車制動過程中,加速度a一般都小于2 m/s2,若選?v為步長計算精度都不會太高,故本文中將選取?t和?s作為牽引計算的步長,在列車低速運行時選?s為步長,在列車高速運行時選?t為步長,這樣既能滿足必要的精度要求,又能提高函數的收斂性。
4 ATP防護曲線仿真算法原理
目標距離模式曲線的算法基礎是列車安全制動距離計算。列車安全制動距離的計算涉及到列車牽引計算。由于ATP防護曲線的計算不涉及牽引工況,故牽引計算中只有制動力和阻力。其單位制動合力即為:

式(7)中,
c—列車的單位阻力(N/kN);
w0—列車單位基本阻力(N/kN);
wi—單位坡道附加阻力(N/kN);
wr—單位曲線附加阻力(N/kN);
ws—單位隧道附加阻力(N/kN)。
b—列車制動力(N/kN);
制動加速度可表示為:

因為輪對、電機等回轉物體會消耗一部分動能,轉動部分消耗的動能一般按列車功能的比例計算,該比例值稱為回轉質量系數γ。修正后的制動加速度為:

目前超速防護曲線的電算方法主要有3種:反算法、直接計算法和雙向遞推算法。直接計算法最接近實際,但實現的步驟太繁瑣,需要大量反復的迭代運算;雙向遞推法過程簡單便于計算,但是需要作圖找交點,如果用曲線擬和的方法太過復雜,但是用離散點組建數組,把求兩曲線交點的問題轉化為求兩直線的交點,又可能精度不夠。反算法結合了上述兩種方法的特點,通過純數學的手段,充分利用計算機處理重復運算快的特點,找到了接近實際、簡單實用的計算方法。
反算法原理如圖4所示,已知列車距目標停車點或減速點的距離,即目標距離為DT,在計算速度控制曲線時,可采用分段迭代法。將長度為DT的區段等分為n個長度為?s的小區段,從已知目標點的目標速度向較高速度反方向計算。
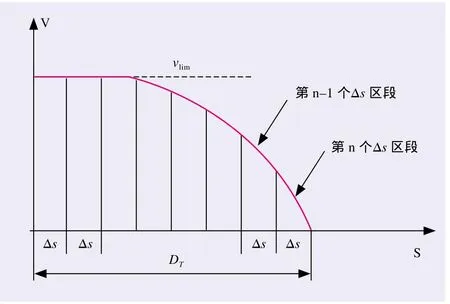
圖4 防護曲線反算法原理
從圖4可知,從第n個?s小區段開始,令該區段的制動末速度vt等于目標速度vT。若選?s為步長,代入式,可算出該區段的制動初速度v0。令相鄰的第(n–1)個?s的制動末速度為第n個區段的制動初速度,計算出第(n–1)個區段的制動初速度,以此類推,當n取足夠大的值時,速度點即形成一條光滑的速度曲線。當計算到某個小區段的制動初速度等于或大于最高限制速度vlim時,表明本點即為制動起點,制動起點到列車當前位置防護速度均為最好限制速度vlim。
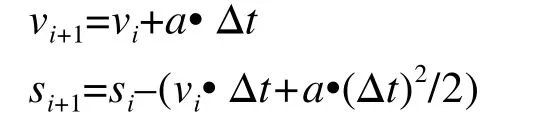
根據前面關于步長選取的分析,在本模型中,選取?t和?s為步長。根據運動學公式,若選?t為步長,則:
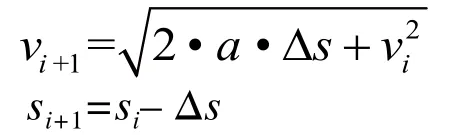
若選?s為步長,則:
速度控制曲線仿真算法流程如圖5所示。
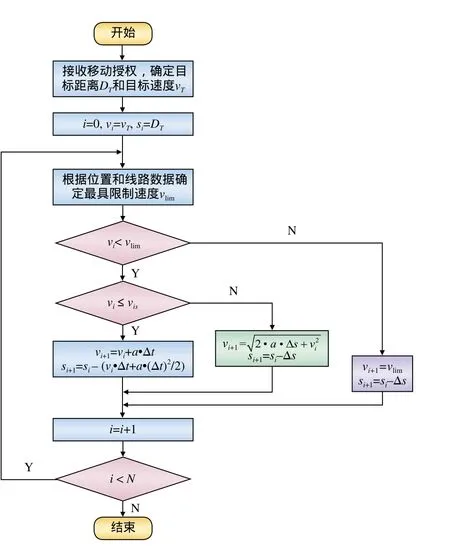
圖5 速度控制曲線仿真算法流程圖
算法流程描述如下:
(1)根據接收的軌道電路信息,確定制動曲線的目標距離點DT和目標速度vT;
(2)令i=0,vi=vT,si=DT即確定制動曲線的初始速度和位移;
(3)根據位移和線路數據確定該位置的最具限制速度,確定本次計算的限速vlim;
(4)判斷vi是否小于vlim,若vi<vlim,再判斷vi是否小于vts(vts為步長由?t換成?s的速度分界值),若vi≤vts,則vi+1=vi+a??s,si+1=si–(vi??t+a?(?t)2/2),若vi>vts,則si+1=si–?s;
(5)若vi≥vlim,則vi+1=vlim,si+1=si–?s;
(6)令i=i+1,判斷i的大小,若i<N,則返回步驟3,否則計算完成。
5 車載ATP曲線的仿真實現
5.1 ATP曲線仿真系統流程圖
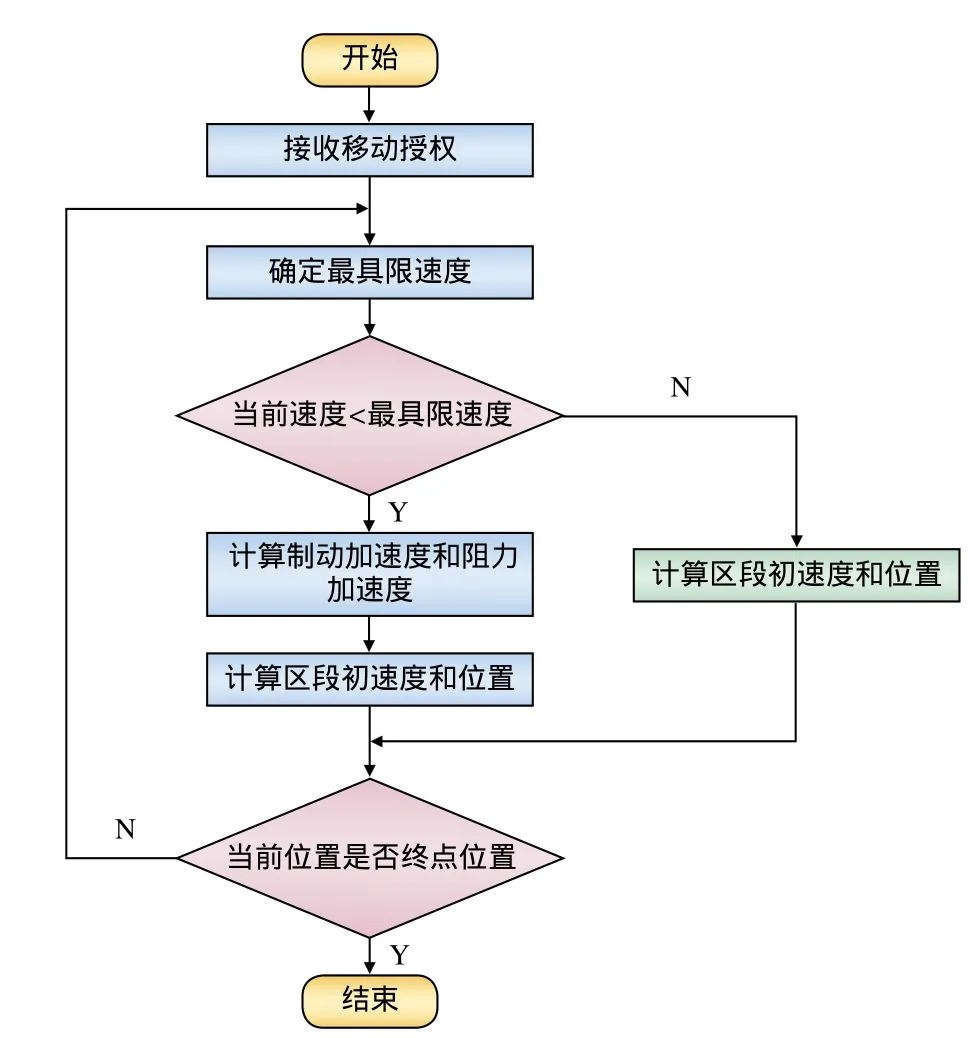
圖6 ATP曲線仿真系統流程圖
如圖6所示,接收到的移動授權包括了目標點的位置和速度,然后利用前面討論的分段迭代法,將目標距離分成N個小區段,從已知目標點的目標速度向較高速度反方向計算。在計算每個小區段的初速度和位置時,要先獲得當前位置的最具限速度,比較當前速度與最具限速度的大小,若當前速度小于最具限速度,然后計算當前位置的加速度,再計算區段初速度和初位置。如當前速度大于最具限速度,則區段初速度等于最具限速度。如此循環,直到計算得到列車所在位置。
5.2 仿真線路參數和車輛參數
在ATP曲線仿真過程中,需要選擇一定的線路參數,線路參數選擇兩站一區間,包括線路長度、坡道、彎道、隧道和最具限制速度等,具體參數見表2和表3。

表2 線路坡道、彎道、隧道的參數表
動車組的數據包括編組長度,質量(包括自重和定員重量)、單位阻力、回轉慣量、牽引特性曲線和制動特性曲線等。CRH3型動車組主要參數如表4所示。

表4 CRH3型動車組參數表
5.3 列車運行阻力的仿真計算
列車運行過程中由于機械摩擦、空氣摩擦、坡道、彎道等因素產生的與列車運行方向相反,阻礙列車運行的力叫做列車運行阻力。按照引起阻力的原因,可分為基本阻力和附加阻力。附加阻力又包括坡道附加阻力、曲線附加阻力和隧道附加阻力。
查資料可知,CRH3型動車組的單位重量基本阻力:

坡度附加阻力公式為:

式(12)~式(13)中,wr為單位重量曲線阻力(N/kN),R為曲線半徑(m),ws為單位重量隧道附加阻力(N/kN),Ls為隧道長度(m)。
5.4 ATP曲線仿真系統的仿真結果
仿真結果如圖7~圖9所示。
從圖7可以看出,當線路上無臨時限速時,ATP曲線從目標點反方向一直算到列車當前允許速度,然后保持該速度不變,一直到列車當前位置。緊急制動的加速度比常規制動的加速度大,所以緊急制動距離小于常規制動距離。
在有臨時限速的條件下:由圖8可知,當列車從高速度降為較低的速度時,依然要根據線路參數、列車性能等數據進行制動曲線的計算,此次制動的目標點為臨時限速的起點,制動的目標速度為臨時限速的大小,一直計算到列車當前最大允許速度,然后保持該速度不變到列車當前位置;由圖9可知,當列車從低速度升為較高速度時,列車有一個施加牽引的過程,但在這個過程中列車的速度始終小于最大允許速度,所以防護曲線可以從較低的速度瞬間跳變到較高的速度,此時同樣能夠保證行車安全。
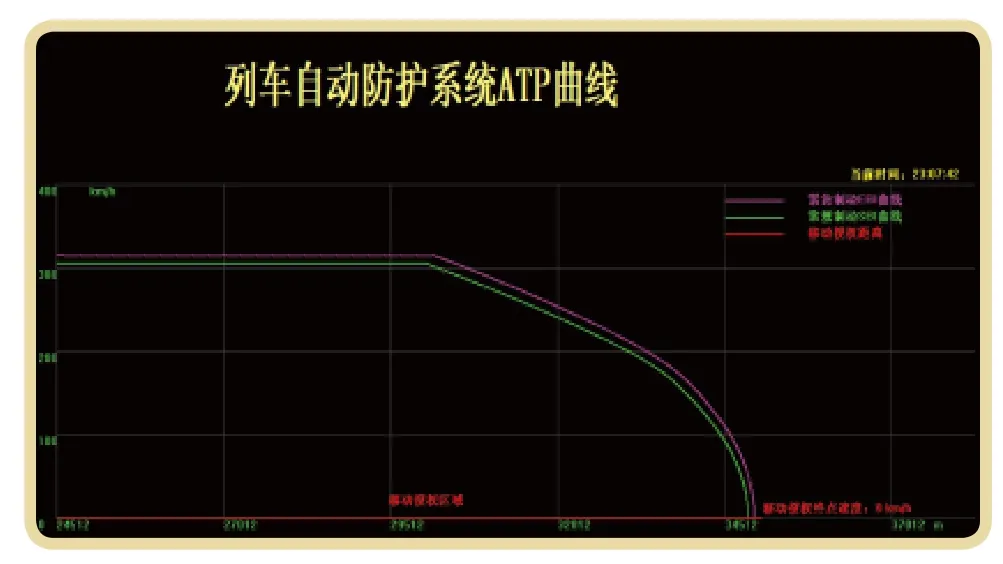
圖7 無臨時限速時的ATP曲線仿真圖
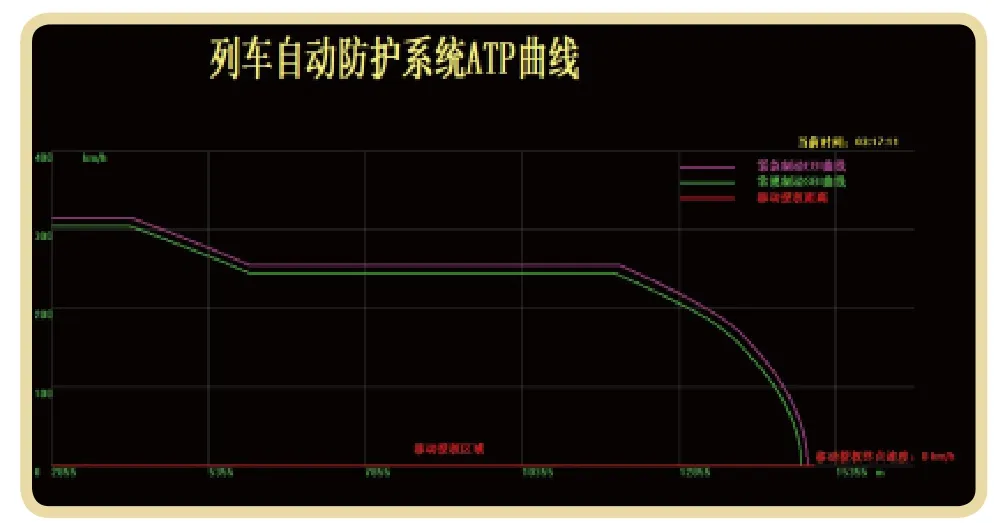
圖8 有臨時限速時的ATP曲線仿真圖(a)
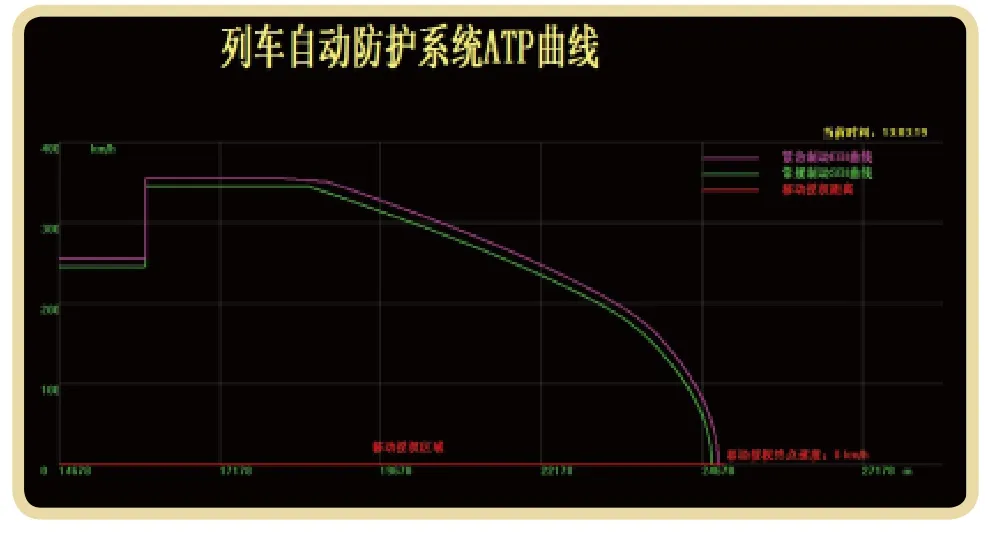
圖9 有臨時限速時的ATP曲線仿真圖(b)
6 結束語
本文從速度防護曲線生成的角度,研究了列車超速防護算法。討論了ATP防護曲線仿真的主要算法,采用分段迭代法,并給出了該算法的軟件設計流程和過程描述,便于軟件仿真實現。在VC++6.0的軟件平臺上實現常規制動曲線和緊急制動曲線的仿真。解決了參數選取、制動力和阻力計算、線路限速等問題。對仿真結果進行了簡要的分析,對解決ATP實際應用中出現的問題具有一定的參考意義。
[1]郭 寧.CTCS2級列控系統超速防護仿真研究[D].成都:西南交通大學,2008:43-44.
[2]談 敏.CTCS3級車載設備測試平臺研究[D].北京:北京交通大學,2008:5-9.
[3]張曙光. CTCS-3級列控系統總體技術方案[M]. 北京:中國鐵道出版社,2008:2-3,92-105.
[4]王長林,林 穎. 列車運行控制技術[M]. 成都:西南交通大學出版社,2004:23-35.
[5]鄧子淵. 城軌車載ATP系統的仿真設計與實現[J]. 鐵道通信信號,2006(2):42-43.