作戰空間協同感知及資源沖突消解研究?
2014-12-02 06:06:48
艦船電子工程 2014年8期
(海軍工程大學電子工程學院 武漢 430033)
1 引言
在對敵方目標進行探測的過程中,考慮到在復雜實時動態環境下,由于存在時間約束和資源約束,需要對傳感器及傳感器所在平臺等資源進行有效地協同和管理,以充分發揮探測設備的性能,改善數據的收集過程,以期達到及早發現目標、改善航跡質量、提高目標跟蹤及識別可靠性的目的,該過程被稱為作戰空間的協同感知。在協同感知的過程中,每個感知資源都是自治的,有著自己獨立的結構、知識庫和問題求解策略,與此同時,每個探測設備的資源、能力、信息是有限的,從而產生沖突。在就沖突進行協商的過程中,如果不能就調度任務的時間、順序和資源分配達成一致,則需要采取部分-全局規劃進行沖突消解。
2 協同感知任務的描述
通常,一個任務可以由如下多元組描述:
Task=〈ID,智能體,subtasks,supertasks,arrival_time,earliest_start time,deadline,quality,duration,cost,utility,condition〉
其中,ID 是任務的序號,它是唯一的編碼;智能體是任務涉及到的智能體;subtasks是子結點任務;supertasks是父結點任務;arrival_time是任務到達的時間;earliest_start time是任務的最早開始時間;deadline是任務的最遲完成時間;quality任務涉及的數量;duration是任務涉及的周期;cost是任務涉及的成本;utility是任務涉及的效用;condition是任務完成的約束條件。
任務分解智能體在接受感知任務后,知識庫查找資源智能體所代表的感知設備的探測能力,將任務涉及到的能力需求與感知設備具有的探測能力進行匹配,從而完成任務的分解。
我們以定義的形式,描述智能體集合和具有的領域知識如下:
假定虛擬多智能體系統指控系統中有資源智能體集合A={a1,a2,…,an},ai表示第i個資源智能體。
定義1Ki={Ki1,Ki2,…,Kim}表示第i個資源智能體在某一領域中所具有的知識(即能力);KA=∪i=1…nKi表示所有資源智能體具有的知識。
定義2 當有任務T需要完成時,解決它需要用到的知識為KT={KT1,KT2,…,KTs}時,有分解過程:
1)當KT∈Ki且ai∈A時,任務T能被單一的資源智能體解決,而不需要分解。
2)當KT∈KA但對于所有的ai∈A,不能得到KT∈Ki,則任務T必須分解,需要被多個智能體來共同解決。T={ST1,ST2,…,STp},且對于所有的STj∈T,j=[1,p],有KSTj?Ki,否則任務T中的子任務需要繼續分解,一直到所有的子任務都可以由相應的智能體集合SASTj?A(∪j=1…pSASTj=A)來完成為止。
3)如果KT?KA恒不成立,則任務T不能被資源智能體集合A完成。需要人來干預決策。
任務分解完成后,明確任務之間的約束關系,以表的方式存儲在系統數據庫中,等待任務智能體進行任務分配。
3 構建協同感知環境
建立協同感知環境的過程分為以下四步:
1)如果某資源智能體接到一個自己不能夠獨立解決的任務,則要重新對任務進行規劃或與任務的發起者就任務重新進行協商,這時,就需要發送協同請求給任務智能體以建立協同群組。
2)任務智能體接收到資源智能體的協同請求后,根據協同請求信息內容和各用戶的功能服務信息庫來選擇需要協同完成該任務的資源智能體,并將協同請求信息轉發給選擇的資源智能體,獲得了該資源智能體的響應后,注冊該資源智能體到組員列表,重復此過程一直到形成一個能夠完成任務的協同群組。
3)各資源智能體和任務智能體維持群組關系直到任務的完成。群組內的各資源智能體之間可以通過任務智能體互相通信。資源智能體可以根據自己的情況請求退出群組,但必須得到任務智能體的確認。若因某個資源智能體的退出而導致完成任務的協同用戶不夠,則由任務智能體再發送協同請求給新的資源智能體請求加入到協同群組。
4)任務智能體撤銷群組關系。任務智能體在任務全部解決完畢后撤銷群組關系,撤銷時由任務智能體發送完成任務并請求撤銷群組的消息給各資源智能體,得到回復后即撤銷群組。
一個群組智能體必須共享所需達到的協同任務和成員列表。當一個資源智能體加入或離開所在的群組時,任務智能體必須確認并更新共享信息。
4 形成共享態勢視圖[1~3]
共享態勢視圖的形成包括以下兩個步驟:
1)合成全局共享態勢圖,包含了地理環境信息、氣候環境信息、地域信息、態勢信息、情報特征信息等信念集及其屬性集。屬性集包括多個特征屬性和相關變元,如情報特征信息的屬性集包含信源可靠度、可信度、時間等屬性和變元。可信度變元可預設為多級信度指標集,信念模型的實值空間即構成全局態勢知識庫。
態勢圖是一個正在不斷發展的概念,最早源于美軍通用作戰態勢圖(Common Operational Picture,COP)。美國國防部的網絡中心戰報告把通用作戰態勢圖提到了非常重要的地位,將其作為戰斗空間感知的基礎。COP 為部隊提供作戰空間的狀態、行動和環境信息。通過COP,指揮官可以實時、準實地了解作戰態勢的發展,快速、準確、自信地交流作戰意圖,作出正確的軍隊行動計劃,準確、及時、高效地實施指揮、控制。態勢圖是一個分布式的數據處理和交換環境,通過開發一個一致的聯合通用數據庫,使用通用的數據框架和設施,跨組織地共享數據,使得每一個參與者能夠通過各自領域的傳感器、專門技術等,貢獻、糾正、增加該數據庫的價值;不是電子傳送的快照或靜態圖像,而是公共信息的動態顯示;不是由于對所有用戶提供同樣的視圖而稱之為“通用”,而是由于所有用戶都使用同樣的數據;讓所有系統都提供信息并不足以產生態勢圖。
戰態勢圖服務體系可以分層部署,逐級上報,態勢圖的生成可以經過通用戰術數據集(Common Tactical Dataset)、通用戰術態勢圖(Common Tactical Picture,CTP)、COP 三個階段。由態勢圖服務體系的參與者實時主動提供數據,在分布式數據管理技術支持下,經過去偽存真、歸一化處理,并保持數據的一致性,建立通用戰術數據集;對各個通用戰術數據集進行關聯/融合處理后,成為在一定領域的通用戰術態勢圖,并主動實時提供給高級指揮部門;高級指揮部門對各戰術態勢圖進行實時統一管理,形成COP,經過權限控制,為每一用戶主動提供實時態勢圖服務。
2)進行信息校驗,包含信息不一致、信息缺失、信息錯誤三個子類型。以信息缺失目標過程為例,定義有屬性信息缺乏、證據缺乏、特征信息缺乏等。屬性信息缺乏指當前目標數據的重要屬性信息不完整,比如速度、位置等。證據缺乏指當前目標信息無法得到其它信息來源的證實。特征信息缺乏指根據當前信息不足以進行目標識別,無法歸入信念集。
5 協同感知任務分配
感知任務的分配過程可以描述為:任務智能體首先將包括截止時間的子任務發送到有能力完成任務的資源智能體,資源智能體針對多個招標的子任務,參考各自的資源條件來進行選擇優化,并提出自己的建議開始時間和截止時間、空閑的其他時間段以及其它任務特性參數。任務智能體接收到多個資源智能體的投標信息后,進行投標的多屬性決策。一旦資源智能體對投標進行了確認,它將鎖定投標任務的時間段,將其保留下來完成該任務,使得別的投標任務不能占用該時段。投標確認后,其它的資源智能體不參與任務的完成,但是如果出現意外情況時,如傳感器故障等,任務智能體與這些替代資源智能體協商來完成任務,這將大大減少調度時間。
6 協同感知沖突消解
資源智能體交互協商目的是進行沖突消解。沖突問題的解決受到沖突資源的性質、資源智能體的主體結構模型、資源智能體的角色、資源智能體的模型種類和資源智能體的行為約束以及推理方法的綜合影響[4]。
沖突消解[5~7]一般包括以下兩種方法:
1)交互協商
協商操作發生在兩個或多個具有相同等級的資源智能體之間[8~9],由某一資源智能體向其它資源智能體發出協商請求,若得到對方允許,則接著發出協商意見,若得到其它資源智能體的認可,則這些資源智能體達成共識,消除了局部決策方案之間存在的矛盾。
資源智能體之間交互協商的抽象算法框架如圖1所示。
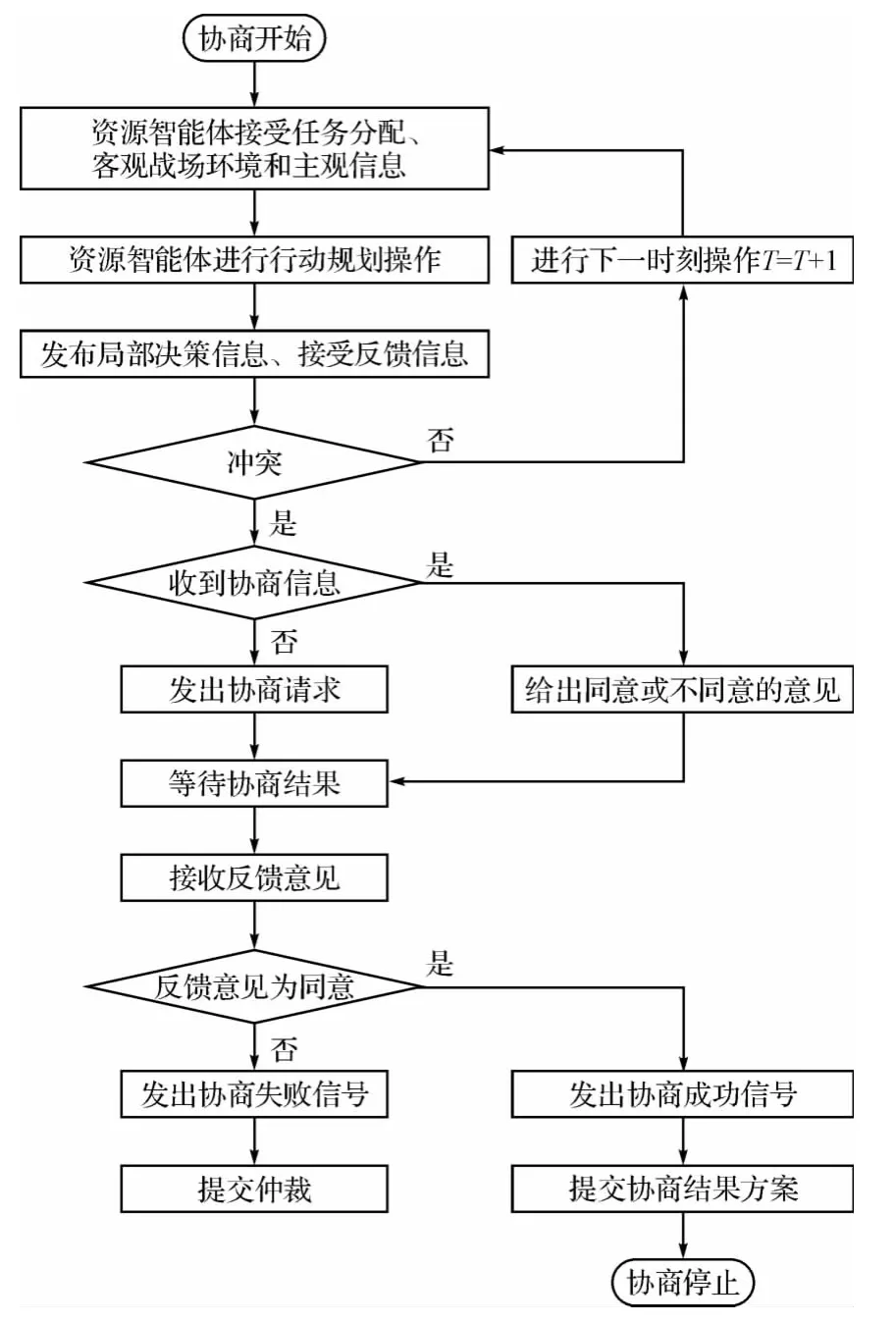
圖1 資源智能體之間交互協商的抽象算法
2)仲裁
若資源智能體無法達成共識,或在所要求的時間范圍內沒有能夠產生一致的局部方案,則通過任務智能體的仲裁功能進行仲裁[10],進而給出一個不矛盾的局部方案。任務智能體提供有規則依據的中心協調強制決策執行的功能。
資源智能體之間提交仲裁的抽象算法如圖2所示。
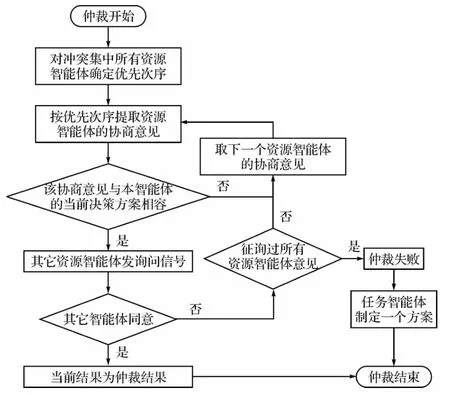
圖2 資源智能體之間提交仲裁的抽象算法
7 結語
本文細化了對探測設備進行任務管理的內涵,使之涵蓋到協同感知環境的構建、協同感知任務的分配以及感知任務的沖突消解等方面,以解決有限時間、有限資源情況下的資源分配、系統組織、行為協調等問題。
[1]趙宗貴,李君靈.共用作戰圖現狀與發展趨勢[J].中國電子科學研究院學報,2008(4):385-392.
[2]王澤根.COP及其GIS應用需求[J].測繪科學,2009(5):151-152.
[3]羅佳,黃璽瑛.基于多重信息單元的戰場態勢要素構建研究[J].國防科技,2012(3):66-70.
[4]徐潤萍,王樹宗,顧健.兵力協同計劃資源沖突協商方法研究[J].系統仿真學報,2005(5):1216-1220.
[5]徐選華,周聲海.非常規突發事件應急決策沖突消解協調方法[J].控制與決策,2013(8):1138-1144.
[6]屈正庚.協同工作中沖突消解機制的研究[J].計算技術與自動化,2012(3):104-108.
[7]王進,徐洸.計算機支持的協同計劃沖突消解問題研究[J].空軍雷達學院學報,2003(3):5-8.
[8]孟秀麗,易紅.基于多目標決策的協同設計沖突消解方法研究[J].計算機集成制造系統,2005(5):625-629.
[9]孫林夫.面向網絡化制造的協同設計技術[J].計算機集成制造系統,2005(1):1-6.
[10]李濤,熊光楞.基于優化算法的沖突仲裁策略[J].計算機學報,2002(1):57-62.
猜你喜歡
吉林廣播電視大學學報(2021年4期)2022-01-14 02:35:48
作文成功之路·小學版(2020年5期)2020-06-11 12:48:26
文苑(2018年23期)2018-12-14 01:06:06
小天使·一年級語數英綜合(2018年11期)2018-11-23 09:47:26
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
資源再生(2017年3期)2017-06-01 12:20:59
中外會展(2014年4期)2014-11-27 07:46:46
