西門子840D SL 系統垂直軸抱閘的雙路控制
2014-12-02 01:32:22中捷機床有限公司遼寧沈陽110141馬俊杰
金屬加工(冷加工) 2014年3期
中捷機床有限公司 (遼寧沈陽 110141)馬俊杰
隨著現代科技的迅猛發展,人們對設備安全的要求越來越高,在數控機床中應用更先進更安全的設計理念已經成為一種趨勢。在數控機床的調試和應用過程中,垂直軸的抱閘控制一直是設計中安全性要求最高的部分。引入一種更加安全的設計思路當然也是刻不容緩。什么是抱閘控制?在數控機床中,為了鎖住與伺服電動機相連的垂直軸的運動,防止機床垂直軸下滑,須對伺服電動機或減速機進行抱閘控制。本文將從多方面分析入手,介紹一種比較有效的控制方法,實現更安全可靠的抱閘控制。本文主要以我公司生產的重大型機床設備應用的西門子840D SL 系統為例予以說明,其他產品的抱閘控制方法可參考其進行。
抱閘的控制原理:當制動器線圈通電時,線圈產生磁場使銜鐵盤吸向磁軛,銜鐵盤與制動盤脫離;當線圈斷電時,磁通消失,銜鐵盤被釋放,彈簧施壓于銜鐵盤,將制動盤壓緊,由摩擦產生制動力矩達到制動的目的。
總體要求:機床上電后正常工作時,垂直軸抱閘釋放;機床斷電或伺服報警后,抱閘實現制動并保持垂直軸不下滑。而且,在機床上電時,要保證伺服電動機先使能,延時后再松開抱閘。機床報警或突然掉電時,高速運轉下的電動機先減速后再抱緊電動機,延時后再關閉電動機使能。機床下電時,先抱緊電動機,由于制動器動作需要時間,因此,必須延時后才能再關閉電動機使能。
在數控機床設計中,關于垂直軸抱閘的控制部分,我們普遍應用的方式是通過驅動模塊自帶的抱閘點控制電動機抱閘或減速機抱閘。硬件的連接方式,如圖1 所示。
當驅動模塊檢測到一切準備好,電動機有使能后,驅動模塊會通過抱閘點輸出24V 的高電平,控制電動機抱閘或減速機抱閘的松開。當電動機模塊檢測到報警或斷開電動機使能的同時,電動機模塊的抱閘輸出點會自動斷開。從而保證了電動機的垂直軸不會因為意外報警或電動機沒使能導致垂直軸突然下滑。
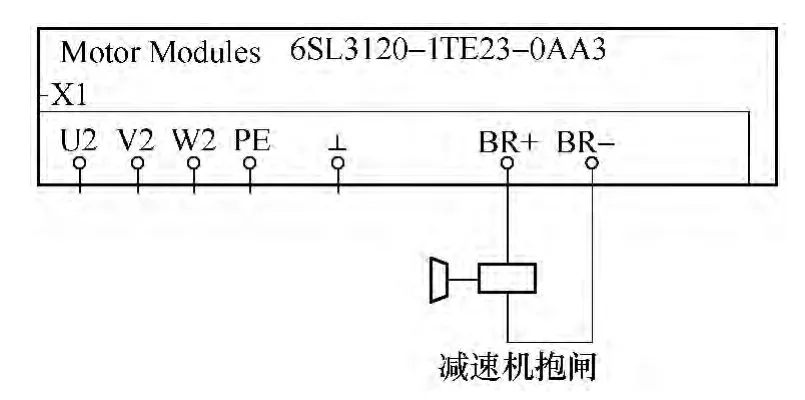
圖1
以上的設計能夠滿足簡單的小型機床的垂直軸抱閘控制。但在重大型機床的設計中,對垂直軸抱閘控制的安全性要求就要非常嚴格。對復雜的抱閘進行控制設計以及減速機抱閘電流要求較大時,就需要更加完善的設計。而且畢竟上述方法是單路控制,如果該路控制邏輯出現了錯誤,后果就不可想象。為了進一步提升設備的安全性,我們對垂直軸的抱閘控制采用雙路外接電源控制。這樣就彌補了上述單路控制方式的缺陷,大幅度提高了機床的安全性能。
下面我們就以重大型機床中的垂直軸(Z 軸)的減速機抱閘控制為例來說明抱閘雙路控制的實現方法。
1.硬件連接
(1)第一路通過伺服的抱閘控制點控制繼電器K14。如圖2 所示。
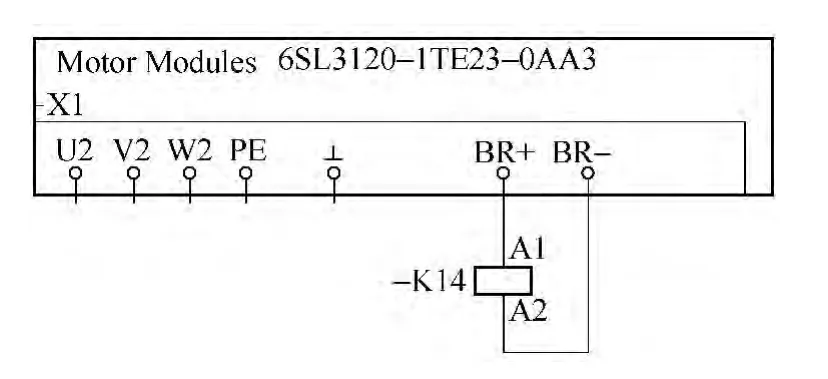
圖2
(2)第二路通過NCU 快速I/O 點控制繼電器K14A。如圖3 所示。
(3)將兩個繼電器串聯控制電動機減速箱抱閘松開的24V 端(也可以控制非24V 的D 電壓電源端)。如圖4 所示。
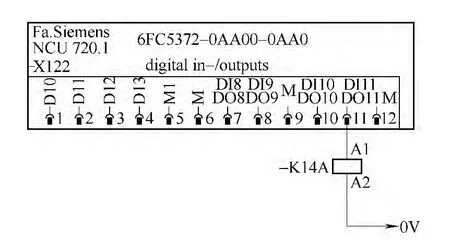
圖3
2.具體控制方法
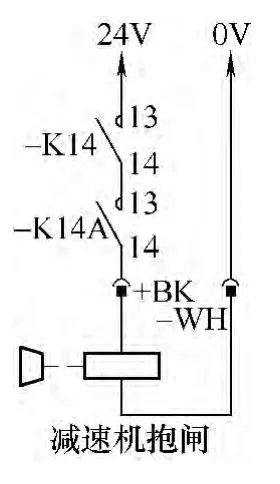
圖4
(1)第一路控制 伺服抱閘控制需要在配置驅動時將該軸配置成有抱閘的電動機軸。配置完成后,當驅動模塊檢測到一切信號準備好,驅動軸有使能的同時,伺服的抱閘控制點會有高電平輸出。如圖2 所示,繼電器K14 得電有動作。
(2)第二路控制 如圖3 所示,我們需要將NCU 硬件X122 的11 腳配置成NC 程序中所用到的快速I/O,例如$A_ OUT [1]。這樣就可以通過NC程序編程來控制$A_ OUT [1]的狀態值,從而控制了NCU 硬件X122 的11 腳的輸出狀態。
如圖5 中所示,在操作面板的參數界面中找到NCU 控制器參數,將其中的參數P728 的bit11 改寫為1,以上操作是將X122 的11 腳設置為輸出。
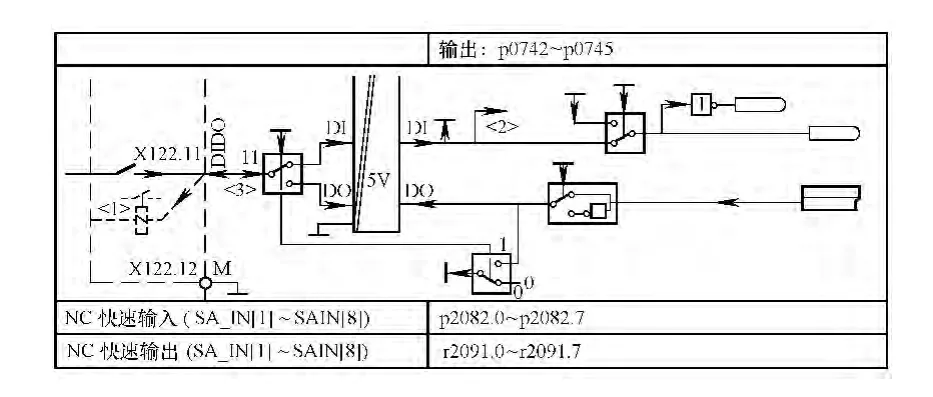
圖5
通過圖5 可以看出:將X122 的11 腳配置成輸出后,該腳輸出的源頭為參數P0741。也就是說當P0741 為1 時,X122 的11 腳就會有高電平的輸出。NC 變量$A_ OUT [1]在NCU 控制器中與參數r2091.0 相關聯。當NC 變量$A_ OUT [1]的狀態值變為1 時,參數r2091.0 的值就會變為1。在NCU控制器P 參數中將P0741 更改為r2091.0。參數r2091.0 的狀態值就會傳送給參數P0741。
經過以上配置,在NCU 的內部將形成一個BICO連接。$A_ OUT [1]—>r2091.0 —>P0741 —>X122 的11 腳。此時,只要NC 變量$A_ OUT [1]有輸出,在X122 的11 腳就會有高電平的輸出。也就是說我們只要對NC 變量$A_ OUT [1]進行編程控制,就可以控制NCU 硬件X122 的11 腳的輸出。這個步驟我們會在下面的步驟(3)中應用到。
PLC 程序如下:
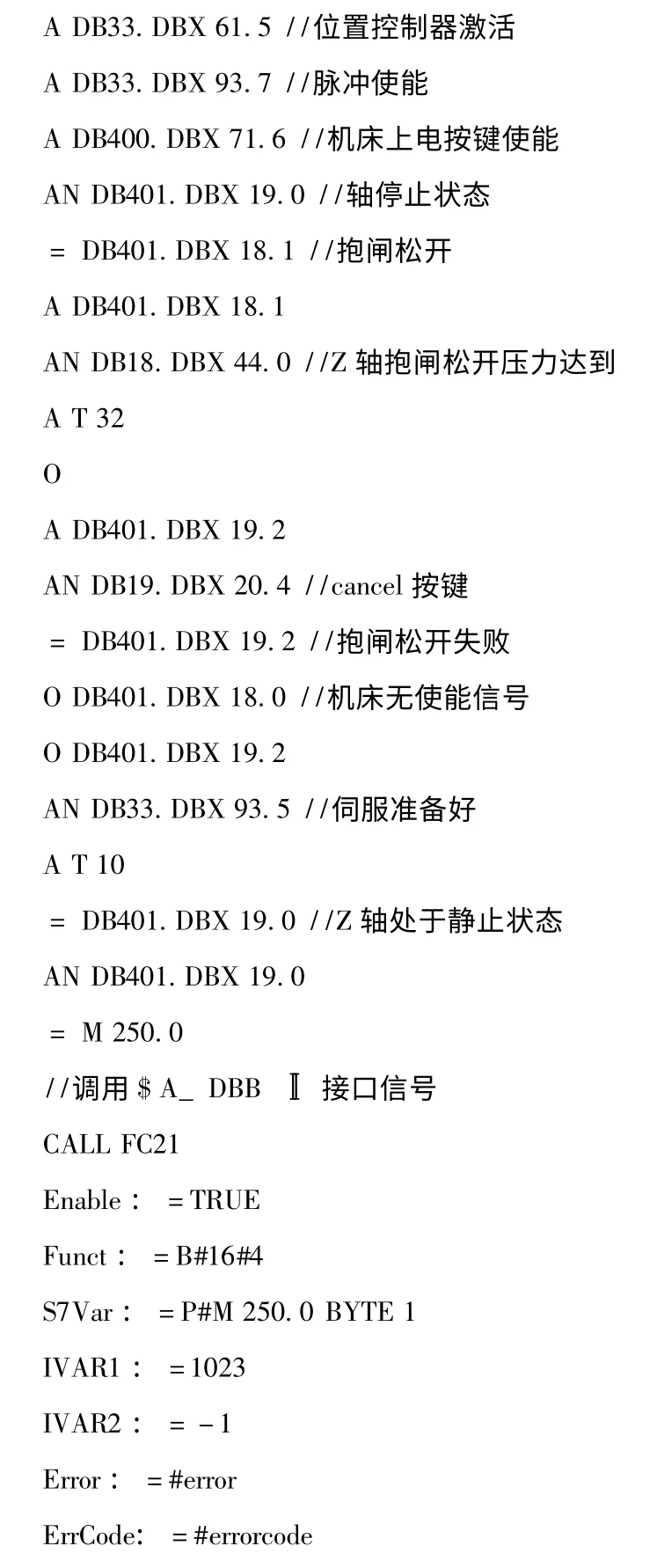
以上PLC 程序中可以看出,當Z 軸處于正常狀態,沒有軸禁止的報警并且確保關于Z 軸的一切信號正常時,M250.0=1,此時狀態代表Z 軸可正常移動,抱閘可以打開。
通過FC21 功能的調用,將MB250 的整個字節狀態位值與$A_ DBB [1023]的整個字節狀態相關聯。在PLC 程序中只要有MB250 字節狀態的改變,NC 變量$A_ DBB [1023]的整個字節狀態就會發生相應的變化。
在NC 同步子程序IDS.SPF 中編入以下程序段:
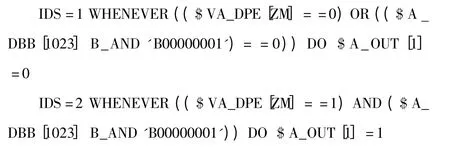
其中,$VA_DPE [ZM]為驅動的脈沖使能,只要該驅動有脈沖使能,$VA_ DPE [ZM]=1。當Z 軸處于正常狀態,沒有軸禁止的報警時,PLC變量M250.0=1,會引起NC 程序中($A_DBB[1023]B_AND 'B00000001')=1 的變化。
從以上子程序的執行過程中可以看出,當M250.0=1 并且$VA_DPE [ZM]=1 時,$A_OUT [1]=1,NCU 硬件X122 的8 腳就會有高電平的輸出。繼電器K14A 得電有動作。
通過以上兩路的控制,只有在所有條件都滿足的情況下,才可能使K14 和K14A 同時得電有動作,共同控制電動機減速機的抱閘打開。在這個過程中無論發生NC 錯誤、PLC 死機還是驅動失效都不會打開減速機的抱閘,從而實現了NC、PLC、驅動多路控制抱閘的功能,全方面保證了垂直軸的安全。
