船舶動力定位關鍵技術研究綜述
2014-12-05 02:18:34吳德烽楊國豪
艦船科學技術 2014年7期
吳德烽,楊國豪
(集美大學 輪機工程學院,福建 廈門361021)
0 引 言
世界經濟高速發展,導致能源和資源短缺問題日益嚴重,海洋資源成為各國激烈爭奪的目標。然而海洋環境復雜多變,若沒有先進技術裝備起來的海上結構物,即使擁有豐富的海洋資源,也難以開發和利用[1]。船舶定位方式主要有錨泊定位、動力定位(Dynamic Positioning,DP)以及錨泊+動力定位3 種。錨泊定位系統結構簡單、可靠、經濟性好,在船舶作業的淺水區域,一般采用錨泊系統定位。文獻[2]指出,在1 500 m 左右的水深范圍內,錨泊輔助動力定位是較為理想的海上結構物定位方式。但隨著水深的增加,錨泊系統布置安裝變得困難,造價和安裝費用激增。目前,常采用錨泊系統與動力定位系統聯合定位的方式[3]。
一般水深情況下,浮式生產系統的系泊主要采用錨泊系統,但隨著水深的增加,錨泊系統的抓底力減小,拋錨的困難程度增加,同時錨泊系統的錨鏈長度和強度都要增加,進而重量劇增,海上布鏈作業也變得復雜,系泊錨鏈的造價和安裝費用猛增,其定位功能也受到很大的限制。換言之,動力定位系統是船舶不可或缺的定位設備之一,已成為海上作業船舶必不可少的支持系統。
1 動力定位控制系統組成
動力定位系統主要由測量系統、控制系統、推進系統和動力系統組成,測量系統提供了坐標反饋及環境傳感功能,控制系統通過一定算法提供閉環調節功能,推進系統是執行器,動力系統則為系統運行提供能量保證。動力定位系統的硬件組成如圖1所示。
船舶動力定位系統各組成部分的工作原理是:通過精確的推進指令自動控制船舶的位置與首向,以保證船舶作業。在實施動力定位操作時,中央處理器即控制器(圖1所示的DP 控制臺)接收系統中安裝的各種傳感器數據,對所接收到的數據處理后估算出船舶的實際位置和首向,估算值顯示在DP 控制臺上,并實時更新。當系統運行在自動定位模式時,DP 操作員設置所期望的設定點,設定點可以是船舶位置或首向、移動的目標如ROV(遙控水下機器人)或者鉆井作業時曲折的連接角。中央處理器將船舶的估算位置和首向與期望設定點進行比較,通過所設計的控制規律,發出推進命令給推進器,以縮小二者之間的差異。到達設定點后,系統自動進行風、浪、流和其他環境因素的補償,從而保持船舶動態穩定在設定點上。由于DP 系統制造商在設計階段即建立了船舶包含空氣動力學與水動力學因素的精確數學模型,因此,盡管受到海洋環境影響,控制系統在計算推力命令時,仍然能使船舶較好地保持在設定點上。
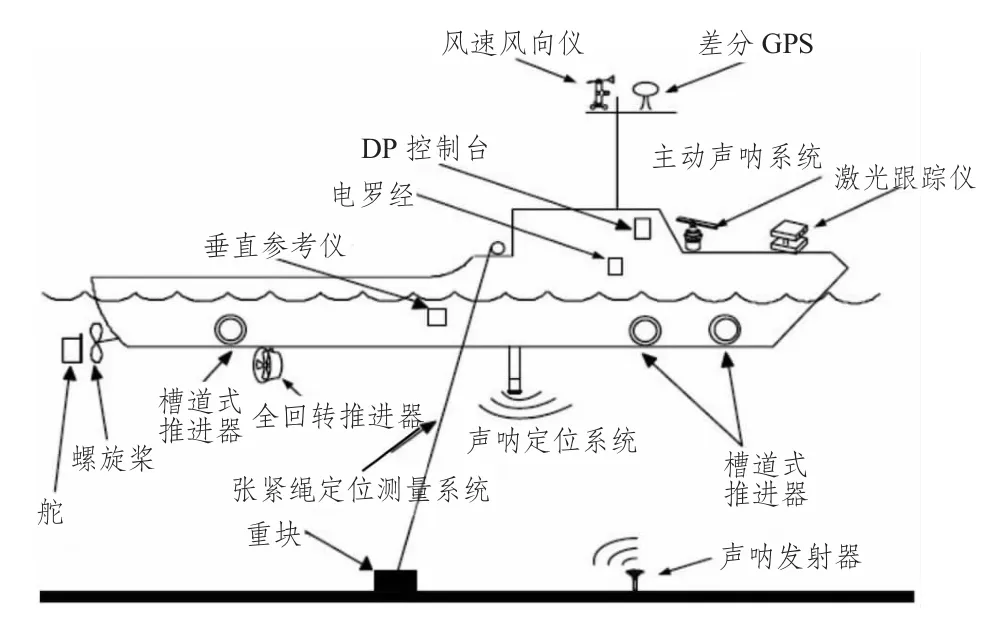
圖1 船舶動力定位系統的硬件組成Fig.1 Hardware components of DPS
2 動力定位控制系統控制器設計研究進展
在動力定位過程中,控制器讀取位置測量系統所得到的位置信號,將其數值與預定的目標值進行比較。經過運算,得到抵消位置偏差和外界干擾力所需要的推力,然后對推力器發出指令,以產生推力使船盡可能靠近所希望的位置。
動力定位系統控制技術可大致分為三大類:第一大類通常采用常規的PID 控制規律;第二大類以現代控制理論為基礎,主要有最優控制和Kalman 濾波理論相結合的方法,非線性控制方法和魯棒控制方法等;第三大類采用智能控制理論和方法,例如神經網絡控制、模糊控制、自適應控制等。需要指出的是,第二大類和第三大類控制器設計方法并無明顯的時間界限,目前仍在發展中。
動力定位控制技術的第一大類,采用的控制方法一般是經典控制,即PID 控制器[4-5],利用此控制器分別控制海平面上船舶在縱蕩、橫蕩以及首搖3 個自由度上的運動。在早期階段,動力定位中應用PID 控制器取得相當大的成功,但其亦具有不可避免的缺點,即設計控制器時,選擇合適的PID 參數較為困難。此外,由于PID 控制器使用的是P,I,D 的線性組合,而動力定位是復雜的非線性系統,其所取得的控制效果必將受到一定限制。
由于PID 控制的局限性,促進了動力定位控制技術第二大類的產生和發展[6-15]。該階段的工作一大部分由Kalman 濾波和最優控制相結合[6],利用Kalman 濾波器對測量得到的船舶綜合運動位置信息,估計出低頻運動狀態,并將之反饋形成針對船舶低頻運動的線性隨機最優控制。由于上述方法系統計算時有多個狀態變量和上百個狀態協方差,導致系統在線計算量很大,因此其中很多協方差值難以在線調整。
非線性控制和魯棒控制也被引入動力定位系統中。文獻[8-11]應用Backstepping(后推法)為動力定位系統設計了非線性反饋控制器,避免了上述在假設條件下對船舶運動方程的線性化。后推法的不足在于構造李雅譜諾夫函數方面,尚缺乏系統方法。文獻[12-13]提出了一些新動力定位系統非線性觀測器和反饋控制規律設計方法,并證明了系統的穩定性。文獻[14-15]基于非線性滑模控制,設計動力定位系統控制器,并證明了所設計控制器具有全局穩定性。文獻[16]基于自抗擾控制技術,設計了船舶動力定位非線性控制器。針對船舶具有推力及力矩存在約束的特點,文獻[17]提出了基于非線性模型預測控制的船舶動力定位控制器。文獻[18]設計了強風中商船動力定位的航向保持非線性魯棒控制器與基于閉環增益成形算法的速度魯棒控制器。
此外,為了避免后推法對非線性模型的多次微分,簡化控制器設計,文獻[19]提出了用動態面控制算法簡化控制器的設計,同時采用挖泥干擾的前饋補償辦法,解決挖泥船動力定位的控制問題。
第三大類主要采用智能控制理論和方法設計控制規律,代表性工作主要有:文獻[20]用Kalman 濾波器處理低頻運動,用自校正濾波器處理高頻運動修正低頻估計值,達到提高調節精度目的且計算量小。文獻[21]利用人工神經網絡強大的建模能力,自適應地將波浪和流產生的力作為前饋反饋到系統中,提前抵制船舶可能發生的漂移,仿真結果驗證算法的有效性。文獻[22]基于模糊控制理論設計了海纜動力定位船舶的控制器。為了彌補模糊控制器在平衡點附近出現的盲區缺陷,設計了模糊-PID 復合控制器。文獻[23]引入自適應模糊控制方法,使控制器的參數能夠在定位過程中不斷調整,以適應外部環境變化。
3 動力定位推力系統推力分配研究進展
國外方面,文獻[24-28]提出無約束二次推力分配方法,雖然推力分配問題被轉化為無約束二次優化問題,文獻[24-28]中的方法均考慮了奇異性的處理,表明該類方法可避免推力配置的奇異結構。文獻[24-26]通過一個擴展推力向量的低通濾波器來計算推力的方向,避免奇異性則通過修正的奇異值分解方法解決。文獻[26]解決了旋轉推進器可產生正向和負向推力的問題。文獻[27]中,推力的方向通過一個低通濾波的期望廣義力計算而得,奇異性是利用在計算推力大小時通過阻尼最小二乘法解決的。文獻[28]提出了多種固定多推進器的無約束二次推力分配方法,同時還考慮了其中某個推進器失效下的推力分配。
線性二次規劃法用于求解推力分配問題有文獻[29-33],文獻[29-31]利用多參數二次規劃可以得到分片的線性函數從而可以預先計算,并且實時計算出推力分配方案。其中,文獻[31]解決了固定方向推進器的推力分配問題,并且概要介紹了動態推力約束的解決方案。此結果于2007年在文獻[31]中被擴展到包含旋轉推進器的情況和非凸問題的分解。文獻[32]提出的顯式分配方案,并未考慮不等式約束。文獻[34-40]提出了非線性約束的推力分配解決方法。其中,文獻[36]利用序列二次規劃法解決推力分配問題,然而它們并未考慮奇異問題,同時該方法容易陷入局部最優。文獻[38-40]利用Lyapunov 方法解決推力分配問題。
國內方面,吳顯法和王言英[41]利用序列二次規劃法解決動力定位系統的推力分配問題,該方法能降低油耗,避免奇異結構。楊世知和王磊等[42]提出偽逆方法用于動力定位推力分配,該文通過實例驗證了所提方法的有效性。施小成等[43]提出組合偏置思想并設計了自適應組合偏置策略,該算法基于能量最優方法,能夠自適應地調整偏置量。
上述方法均為確定性方法,由于確定性方法大多要求目標函數連續可微并且在求解最優值時常容易陷入局部最優,近年來,研究者嘗試將智能優化算法用于解決具有復雜約束條件的推力分配問題,例如文獻[44-45]利用遺傳算法合理地解決了推力分配問題。文獻[46]論證了遺傳算法和序列二次方法2 種算法的可行性與穩定性,并且對比2 種算法的優缺點,指出序列二次法較遺傳算法收斂速度快,然而序列二次法對初值的依賴較大。而遺傳算法對初值依賴較小,然而收斂速度慢。
4 動力定位測量系統濾波與數據融合技術研究進展
動力定位測量系統的信息精度和可信度至關重要。大多數動力定位船舶均配備多種位置參考系統和多個傳感器,船舶在定位過程中受到風、浪、流等外界因素干擾,使得傳感器被高頻噪聲污染,為此需要研究測量系統濾波技術。姜華等[47]基于船舶數學模型,研究設計了Kalman 濾波器,利用仿真結果驗證了利用此濾波器可較好地估計船舶實際船位和方向。王宗義等[48]采用Kalman 濾波器計算得到船舶三自由度低頻運動,還能濾除測量得到的船舶綜合位置信息中的高頻噪聲。王曉聲等[49]結合最優控制和自適應Kalman 濾波技術,對在復雜多變的海洋環境下工作的船舶高、低頻運動實施估計,保證定位系統僅對船舶低頻運動進行控制。劉芙蓉等[50]研究了滾動時域濾波方法在動力定位船舶控制系統設計中的應用。付明玉等[51]建立船舶低頻和高頻運動數學模型,設計了濾除偏差信號中高頻分量的最優估計濾波器和有限沖擊濾波器。
為了克服卡爾曼濾波要求系統具有準確的動態模型并且要求噪聲是白噪聲的缺點,李蘭花等[52]采用H∞濾波方法獲得船舶的低頻運動。齊國鵬[53]將動力定位過程中的挖泥船劃分為2 種狀態:自由航行狀態和變吃水作業狀態。在自由航行狀態下,引入了Sage-Husa 自適應濾波算法;變吃水作業狀態下,采用了Sage-Husa 自適應濾波和強跟蹤卡爾曼濾波相結合的改進的自適應濾波算法,很好解決了動力定位系統中的濾波問題。信洪杰[54]則采用自適應線性神經網絡濾波器有效地消除船舶的高頻分量。
由于動力定位系統中的位置參考系統和傳感器存在冗余,必須應用數據融合技術得到船舶的精確位置信息。現有相關的數據融合方法主要針對具體融合算法的研究,針對動力定位系統方面的較少。衣鵬飛[55]采用基于置信測度的融合方法,仿真和半實物仿真結果表明該方法可實時處理數據并融合,且能給出融合最優結果。Shi 等人[56]提出綜合無跡卡爾曼濾波(UKF)和聯邦濾波(Federated filter)的數據融合方法,UKF 可提高算法的精度,而聯邦結構則改善了多速率信息融合的濾波能力。
5 結 語
本文總結了船舶動力定位系統中控制器設計、推力分配方法、測量系統濾波與數據融合等幾個關鍵技術的研究進展,得出如下結論:
1)我國在動力定位基礎研究方面由于比國外起步晚,尚顯落后。然而近年來,呈現出趕超國際先進水平的趨勢。
2)控制系統的控制器設計是動力定位的核心。控制理論的發展推動了動力定位控制器設計的發展,眾多控制理論的新成果均被應用到動力定位系統中。進一步地,結合多種控制策略的復合方式正被研究者們用于設計具有動態不確定性的動力定位控制器中。未來的動力定位控制系統研究必將朝著復合型、更快速準確的方向發展。
3)推力系統中的推力分配方法主要有確定型方法和基于智能優化的方法。為了提高基于智能優化算法的推力分配策略解算推力的快速性,研究混合智能推力分配理論和策略是推力系統的研究方向。
4)Kalman 濾波方法仍是測量系統濾波技術的主流方法,研究更加高效濾除傳感器噪聲的濾波方法勢在必行。動力定位中的數據融合技術在國內研究較少,應吸收借鑒數據融合中相關技術和方法,進一步將其應用于動力定位系統中。
[1]陳恒.深海半潛式平臺動力定位推力系統設計研究[D].上海:上海交通大學,2008.
CHENG Heng.Research on design of DP thruster system of deepwater semi- submersible platform[D].Shanghai:Shanghai Jiao Tong University,2008.
[2]孫攀,王磊,王亮.深水半潛平臺錨泊輔助動力定位系統功率消耗研究[J].海洋工程,2010,28(3):24-30.
SUN Pan,WANG Lei,WANG Liang.Research on power consumption of position mooring system for a deep sea semi-submersible platform[J].Ocean Engineering,2010,28(3):24-30.
[3]趙志高,楊建民,王磊,等.動力定位系統發展狀況及研究方法[J].海洋工程,2002,20(1):91-97.
ZHAO Zhi-gao,YANG Jian-min,WANG Lei,et al.The development and research method of dynamic positioning system[J].Ocean Engineering,2002,20(1):91-97.
[4]SARGENT J S,COWGILL P N.Design considerations for dynamically positioned utility vessels[C].Proceedings of the 8th Offshore Technology Conference,Dalas,1976:175-196.
[5]MORGAN J M.Dynamic positioning of offshore vessels[M].Petroleum,Tulsa,1978.
[6]BALCHEN J G,et al.A dynamic positioning system based on Kalman filtering and optimal control[J].Modeling,Identification and Control,1980,1(3):135-163.
[7]GRIMBLE M J,PATTON R J,WISE D A.The design of dynamic positioning control systems using stochastic optimal control theory[C].OCEANS′79,USA:San Diego,1979:488-497.
[8]FOSSEN T I,GRVLEN A.A tutorial on nonlinear backstopping:applications to ship control[J].Modeling,Identification and Control,1999,20(2):83-135.
[9]ROBERTSON A,JOHANSSON R.Comments on“nonlinear output feedback control of dynamically positioned ships using vectorial observer backstepping”[J].IEEE Transactions on Control Systems Technology,1998,6(3):439-441.
[10]張宇華,李璟延,姜建國.基于力與力矩補償的挖泥船動力定位反步法控制研究[J].船舶工程,2010,32(4):17-20+23.
ZHANG Yu-hua,LI Jing-yan,JIANG Jian-guo.Study on the dynamic positioning of dredgers backstepping control based on torque compensation[J].Ship Engineering,2010,32(4):17-20+23.
[11]趙之韻.船舶動力定位系統控制器設計[D].大連:大連海事大學,2009.
ZHAO Zhi-yun.The controller design of marine dynamic positioning system[D].Dalian Maritime University,2009.
[12]LORIAL A.FOSSEN T I,PANTELEY E.A separation principle for dynamic positioning of ships:theoretical and experimental results[J].IEEE Transactions on Control Systems Technology,2000,8(2):332-343.
[13]PAULSEN M,EGELAND O,FOSSEN T I.A passive feedback controller with wave fiter for marine vehicles[J].International Journal of Robust and Nonlinear Control,1998,8(15):1239-1253.
[14]TANNURI E A,AGELAND A C,MORISHITA H M.Dynamic positioning systems:an experimental analysis of sliding mode control[J].Control Engineering Practice,2010,18(10):1121-1132.
[15]GIRARD A R,HEDRICK J K.Dynamic positioning of ships using nonlinear dynamic surface control[C].Proceedings of the 5th IFAC Symposium on Nonlinear Control Systems,Saint-Petersburg,2001.
[16]趙大威,邊信黔,丁福光.非線性船舶動力定位控制器設計[J].哈爾濱工程大學學報,2011,32(1):57-61.
ZHAO Da-wei,BIAN Xin-qian,DING Fu-guang.Design of a nonlinear controller for dynamic ship positioning[J].Journal of Marine Science and Application,2011,32(1):57-61.
[17]王元慧,隋玉峰,吳靜.基于非線性模型預測的船舶動力定位控制器設計[J].哈爾濱工程大學學報,2013,34(1):1-7.
WANG Yuan-hui,SUI Yu-feng,WU Jing.Marine dynamic position system based on nonlinear model predictive control[J].Journal of Marine Science and Application,2013,34(1):1-7.
[18]張楊,張顯庫,王新屏,等.強風中普通商船動力定位的研究[J].船舶工程,2008,30(2):58-62.
ZHANG Yang,ZHANG Xian-ku,WANG Xin-ping,et al.Study on the dynamic orientation of common commercial vessels in the strong wind[J].Ship Engineering,2008,30(2):58-62.
[19]張宇華,姜建國,郜登科.結合非線性動態面和前饋補償的挖泥船動力定位控制[J].應用科學學報,2012,30(2):203-208.
ZHAGN Yu-hua,JIANG Jian-guo,HAO Deng-ke.Dynamic positioning of dredgers using nonlinear dynamic surface control and feed-forward compensation[J].Journal of Applied Sciences,2012,30(2):203-208.
[20]陳禹六,馮子葵.應用自校正濾波器的動態船舶定位系統設計[J].自動化學報,1985,11(3):274-281.
CHEN Yu-liu,FENG Zi-kui.The application of self-tuning filters in design dynamic ship positioning control system[J].Acta Automatic Sinica,1985,11(3):274-281.
[21]DING Li,MAO Xiang-gu.Dynamic positioning of ships using a planned neural network controller[J].Journal of Ship Research,1996,40(2):164-171.
[22]孫俊.模糊控制技術在海纜作業船動力定位的應用研究[D].上海:上海交通大學,2010.
SUN Jun.Research on dynamic positioning of submarine cable workboat based on fuzzy control.Shanghai:Shanghai Jiao Tong University,2010.
[23]芮世民,朱繼懋,黃根余.應用自適應模糊控制實施船舶動力定位[J].上海交通大學學報,2000,34(1):56-59.
RUI Shi-min,ZHU Ji-mao,HUANG Gen-yu.Adaptive fuzzy control for ship dynamic positioning system[J].Shanghai:Shanghai Jiao Tong University,2000,34(1):56-59.
[24]S?RDALEN O J.Thrust allocation:singularities and filtering[C].13th World Congress of IFAC,volume Q,San Francisco,USA,1996:369-374.
[25]S?RDALEN O J.Full sea trials with optimal thrust allocation[C].IFAC Conference on Maneuvering and Control of Marine Craft,Brijuni,Croatia,1997:177-182.
[26]S?RDALEN O J.Optimal thrust allocation for marine vessels[J].Control Engineering Practice,1997(5):1223-1231.
[27]BERGE S P,FOSSEN T I.Robust control allocation of overactuated ships:experiments with a model ship[C].IFAC Conference on Maneuvering and Control of Marine Craft,Brijuni,Croatia,1997:193-198.
[28]GARUS J.Optimization of thrust allocation in the propulsion system of an underwater vehicle[J].International Journal of Applied Mathematics and Computer Science,2004,14(4):461-467.
[29]JOHANSEN T A,FOSSEN T I,T?NDEL P.Efficient optimal constrained control allocation via multiparametric programming[J].Journal of Guidance,Control and Dynamics,2005,28(3):506-515.
[30]JOHANSEN T A,FUGLSETH T P,T?NDEL P,FOSSEN T I.Optimal contrained control allocation in marine surface vessels with rudder[J].Control Engineering Practice,2008,16(4):457-464.
[31]JOHANSEN T A,FUGLSETH T P,T?NDEL P T,et al.Optimal constrained control allocation in marine surface vessels with rudders[J].Control Engineering Practice,2008,16(4):457-464.
[32]LINDEGAARD K P,FOSSEN T I.Fuel-efficient rudder and propeller control allocation for marine craft:experiments with a model ship[J].IEEE Trans.Control Systems Technology,2003,11(6):850-862.
[33]RUTH E,S?RENSEN A J,PEREZ T.Thrust allocation with linear constrained quadratic cost function[C].7th IFAC Conference on Control Applications in Marine Systems,Bol,Croatia,2007:337-342.
[34]SINDING P,ANDERSON S V.A force allocation strategy for dynamic positioning[C].Proceedings of the Eight International Offshore and Polar Engineering Conference,Montreal,Canada,1998:346-353.
[35]WEBSTER W C,SOUSA J.Optimum allocation for multiple thrusters[C].Proc.International Society of Offshore and Polar Engineers Conference,Brest,France,1999:83-89.
[36]LIANG C C,CHENG W H.The optimum control of thruster system for dynamically positioned vessels[J].Ocean Engineering,2004,31(1):97-110.
[37]JOHANSEN T A.Optimizing nonlinear control allocation[C].Proceedings of 43rd IEEE Conference on Decision and Control,Paradise Island,Bahamas,2004:3435-3440.
[38]JOHANSEN T A,FOSSEN T I,BERGE S P.Constrained nonlinear control allocation with singularity avoidance using sequential quadratic programming[J].IEEE Trans.Control Systems Technology,2004,12(1):211-216.
[39]TJ?NN?S J,JOHANSEN T A.Optimizing nonlinear adaptive control allocation[C].IFAC World Congress,Prague,Czech Republic,2005:849-854.
[40]TJj?NN?S J,JOHANSEN T A.On optimizing nonlinear adaptive control allocation with actuator dynamics[C].7th IFAC Symposium on Nonlinear Control Systems,Pretoria,South Africa,2007:3780-3785.
[41]吳顯法,王言英.動力定位系統的推力分配策略研究[J].船海工程,2008,37(3):92-96.
WU Xian-fa,WANG Yan-ying.Design of the thrust allocation for the dynamic positioning system[J].Ship and Ocean Engineering,2008,37(3):92-96.
[42]YANG Shi-zhi,WANG Lei,SUN Pan.Optimal thrust allocation logic design of dynamic positioning with pseudoinverse method[J].Journal of Shanghai Jiaotong University(Science),2011,16(1):118-123.
[43]施小成,魏玉石,寧繼鵬,等.基于能量最優的組合偏置推力分配算法研究[J].中國造船,2012,53(2):96-104.
SHI Xiao-cheng,WEI Yu-shi,NING Ji-peng,et al.Research on group biasing thrust allocation algorithm based on power optimization[J].Shipbuilding of China,2012,53(2):96-104.
[44]劉曰強.半潛式平臺動力定位系統推力分配優化算法研究[D].哈爾濱:哈爾濱工程大學,2009.
LIU Yue-qiang.Research on the thrust allocation for dynamic positioning system of semi-submersible platform[D].Harbin:Harbin Engineering University,2009.
[45]ZHAO Da-wei,DING Fu-guang,TAN Jin-feng,et al.Optimal thrust allocation based GA for dynamic positioning ship[C].Proceedings of the 2010 IEEE International Conference on Mechatronics and Automation,Xi′an,China,2010:1254-1258.
[46]楊世知,王磊,張申.基于能耗最優化的動力定位推力分配邏輯算法研究(英文)[J].船舶力學,2011,15(3):217-226.
YANG Shi-zhi,WANG Lei,ZHANG Shen.Optimal thrust allocation based on fuel-efficiency for dynamic positioning system[J].Ship Mechanics,2011,15(3):217-226.
[47]姜華,王建平.Kalman 濾波技術在船舶動力定位技術中的應用[J].大連海事大學學報,1998,24(2):54-57.
JIANG Hua,WANG Jian-ping.The use of kalman filtering techniques in dynamic ship positioning system[J].Journal of Dalian Maritime University,1998,24(2):54-57.
[48]王宗義,削中,等.船舶動力定位數學模型和濾波方法[J].哈爾濱工程大學學報,2002,23(4):24-28.
WANG Zong-yi,XIAO Zhong,et al.Mathematical models and filtering methods for dynamic ship positioning[J].Journal of Marine Science and Application,2002,23(4):24-28.
[49]王曉聲.船舶動力定位系統設計及試驗研究[J].中國造船,1991(3):11-19.
WANG Xiao-sheng.Design and test of dynamic positioning system[J].Shipbuilding of China,1991(3):11-19.
[50]劉芙蓉,陳輝,高海波.滾動時域濾波在動力定位船舶中的應用[J].武漢理工大學學報,2010,32(12):117-120.
LIU Fu-rong,CHEN Hui,GAO Hai-bo.Application of moving horizon filter for dynamic positioning ship[J].Journal of Wuhan University of Technology,2010,32(12):117-120.
[51]付明玉,丁福光.船舶動力定位系統濾波器的設計與研究[J].船舶工程,1996(2):43-46.
FU Ming-yu,DING Fu-guang.The design and study of filter in ships dynamic positioning system[J].Ship Engineering,1996(2):43-46.
[52]李蘭花,夏國清.H∞濾波器在船舶動力定位系統中的應用[J].自動化技術與應用,2005,24(11):35-37.
LI Lan-hua,XIA Guo-qing.Application of H∞filtering to dynamical positioning of the ship[J].Techniques of Automation and Application,2005,24(11):35-37.
[53]齊國鵬.耙吸挖泥船的船舶運動建模及濾波技術研究[D].鎮江:江蘇科技大學,2012.
Qi Guo-peng.Ship motion modeling and filtering technology research on trailing suction hopper dredger[D].Zhenjiang:Jiangsu University of Science and Technology,2012.
[54]信洪杰.船舶動力定位系統濾波及控位方法研究[D].哈爾濱:哈爾濱工程大學,2011.
XIN Hong-jie.Research on method of filtering and position controlling for a dynamic positioning ship[D].Harbin Engineering University,2011.
[55]衣鵬飛.船舶動力定位位置參考系統信息融合方法研究[D].哈爾濱:哈爾濱工程大學,2010.
YI Peng-fei.Research on data fusion for position reference system of DP ship[D].Harbin Engineering University,2010.
[56]SHI Xiao-cheng,SUN Xing-yan,FU Ming-yu,et al.Federated filter for multi-sensor data fusion of dynamic positioning ship[C].Proceeding of the IEEE International Conference on Automation and Logistics,Zhengzhou,China,2012:13-18.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
鐵道通信信號(2020年9期)2020-02-06 09:15:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
