矢量陣被動合成孔徑算法
2014-12-05 02:18:40余桐奎劉文帥李欣童
艦船科學技術 2014年7期
關鍵詞:信號
余桐奎,劉文帥,王 郁,李欣童
(1.大連測控技術研究所,遼寧 大連116013,2.哈爾濱工程大學 水聲技術國家級重點實驗室,黑龍江 哈爾濱150001)
0 引 言
水下聲隱身性是水下航行器最主要的性能之一,如何有效估計其水下輻射噪聲是一個非常重要的問題。傳統的水下目標輻射噪聲測量多采用單聲壓水聽器進行,該測量方法原理簡單,工程實施難度低,雖不能獲得空間增益,但是可以使用聲壓水聽器陣列獲得空間增益,如果需要獲得的空間增益越大,則需要的水聽器陣列越長,從而使得工程實現難度大,代價昂貴。同時,隨著減振降噪技術的發展,水下航行器輻射噪聲在不斷下降,采用聲壓線陣也難以獲得更高的增益,利用矢量水聽器具有的指向性,且不隨頻率改變,可以用小尺寸的矢量水聽器獲得較大尺寸常規基陣同樣的增益,該技術已經廣泛應用于低噪聲目標的輻射噪聲測量中。伴隨著水下航行器輻射的降低和頻率的下移,采用單矢量水聽器的方法還很難滿足檢測要求,矢量水聽器線列陣必然是一種首要的選擇。基于此原因,本文將被動合成孔徑技術應用于矢量線列陣,并給出仿真研究結果。
1 被動合成孔徑測量模型
被動合成孔徑處理技術是一種通過接收水聽器的運動來增加線列陣有效孔徑的一種技術。其最主要的優點是通過一個短的拖曳線列陣的勻速直線運動可以獲得與長的線列陣相同的增益,從而降低長線列陣的設計建造成本及控制難度。
相對于傳統的波束形成技術,信號的增益和角度分辨率都與線列陣的孔徑長度有關,常規波束形成的信號增益可以表示為
式中:N 為陣元的個數;d 為陣元間距;λ 為入射信號的波長;θ 為入射角度;θs為變化的角度。
由式(1)可以看出,對于傳統的波束形成技術,在相同陣元間距的前提下可以通過增加陣元個數來提高陣增益,同時也增加了線的長度,從而給陣的設計及布放增加了難度。基于此原因,人們提出了一種新的思路,就是通過相對勻速直線運動的線列陣進行采樣,經過相位及空間補償進行子陣合成,得到虛擬的大孔徑的一種算法,即稱為合成孔徑方法。
被動合成孔徑的核心思想是利用信號的相關性,擴展的陣元可視為物理陣元時間上的延遲,通過對相位及空間位置的補償合成一個虛擬長線列陣。
圖1 被動合成孔徑原理圖Fig.1 The theory of passive synthetic aperture
圖1 中,拖曳線列陣的陣元個數為N,陣元間距為d,拖曳速度為v。t=0 時刻,N 元線列陣開始對聲場進行空間采樣,經τs 后,線列陣運動距離為vτ,選擇適當的參數v 使得vτ=qd,即線列陣正好移動了q 個陣元的位置,陣元個數增加了q個;當t=Kτs 時,得到的虛擬陣元個數為N+Kq,即得到1 個擴展陣元后的虛擬陣,用此虛擬陣對接收信號進行處理,可以獲得比原來線列陣更高的增益。
假設在利用被動合成孔徑對艦船進行噪聲檢測過程中,傳播介質均勻且各向同性,拖曳陣位于所測聲源的遠場,陣元間距遠小于入射波波長(d <<λ),且不考慮陣元間的相互耦合作用。根據圖1,t=ti時刻,第n 個陣元的輸出信號可表示為:

式中:c 為海水中的聲速;ψn(ti)為均值為0 的高斯白噪聲(由于ψn(ti)為均值為零的高斯白噪聲,與聲源信號相互獨立,因此,在下面推導過程中將噪聲項省略)。
由于聲源與拖曳線陣之間的相對運動會產生多普勒效應,若目標為窄帶聲源 s(ti)=Aexp(j2πf0ti),f0為聲源頻率,v/c <<1,則拖曳陣列接收到的頻率為f=f0(1 ± vsinθ/c)。
若忽略高階項(n-1)vdf0sin2θ/c2,且目標與拖曳陣做相對遠離的運動,則ti時刻第n 個陣元的輸出信號可寫成:

t=ti+τ 時刻,第n 個陣元的輸出信號可表示為:

選擇適當的v和c,使得vτ=qd,則式(4)可以寫成:

t=ti時刻,虛擬陣的第n+q 個陣元的輸出信號可表示為:

對比式(5)和式(6)可發現,兩式僅差1 個相位差exp(j2πf0τ)項,二者關系可以寫成:

因此,可以通過對ti+τ 時刻的xn(ti+τ)進行相位修正合成ti時刻的xn+q(ti),即將N 個陣元的線列陣擴展成N+q 個陣元的虛擬陣,然后利用該虛擬陣對聲源信號進行檢測。
對式(2)進行傅離葉變化得:
則第K 個子陣波束形成輸出為:
其中θs為波束的變化角度。因此被動合成孔徑的陣列輸出為:


圖2 矢量陣被動合成孔徑算法流程圖Fig.2 The flow chart of passive synthetic aperture based on vector sensor array
2 仿真研究
仿真算例1:假設遠場目標聲源頻率f=1 000 Hz,入射角度θ=25°到達接收陣列,采樣頻率fs=10 kHz,水聽器陣元間距d=0.5 m,采用8 元聲壓水聽器組成的均勻線列陣接收到達目標信號。測量船以6 kn 勻速拖曳著水聽器陣列沿著拖曳線列陣的方向向前移動。假定在垂直與陣列方向的速度為0,合成次數H=6 次,仿真結果如圖3所示。
由圖3 可以看出,相比常規波束形成,被動合成孔徑具有更高的空間分辨率,而且具有更低旁瓣級,可以實現水下噪聲源近場高分辨定位。

圖3 常規波束與被動合成孔徑波束對比圖Fig.3 Beam output of conventional beam and passive synthetic aperture
圖4 聲壓陣與矢量陣被動合成孔徑波束對比圖Fig.4 Beam output of passive synthetic aperture based on vector sensor array and sound pressure array
仿真算例2:考慮矢量水聽器陣列,其他仿真條件與仿真算例1 相同。
由圖4 可以看出,采用常規聲壓水聽器陣被動合成孔徑波束在高頻段會出現空間混疊,難以準確找到聲源的真實位置,對聲源定位產生干擾;而矢量水聽器陣列就可以有效抑制聲源定位中的左右弦模糊,波束主瓣寬度較窄,提高了方位分辨力,獲得的空間增益也相對較高。
仿真算例3:考慮矢量水聽器陣列,分別只改變陣元數,合成次數,陣元間距及陣元重疊數等參數,其他仿真條件與仿真實驗一相同,分析結果如圖5所示。
由上述仿真結果可以得到如下結論:
1)陣元數目越多,得到的波束主瓣寬度越窄,獲得的陣增益越高;
2)合成孔徑次數越多,波束主瓣寬度越窄,獲得的陣增益越高;
3)陣元間距取λ/2 時,波束主瓣寬度比λ/3 、λ/4和λ/6 理想,可以降低旁瓣,抑制柵瓣的產生;
4)重疊數越高,波束主瓣寬度越窄,獲得的陣增益越高,但是,相對于陣元數、合成次數及陣元間距參數,效果一般。
綜上所述,增加陣元數,增加合成孔徑次數,選擇適當陣元間距和重疊水聽器陣元個數,更利于對艦船噪聲的檢測;但是,也不能無限制的增加陣元數和合成孔徑的次數,陣元數過多,工程實現難度加大,同時,合成孔徑的基本要求信號的空間相關時間要大于合成孔徑的積分時間。
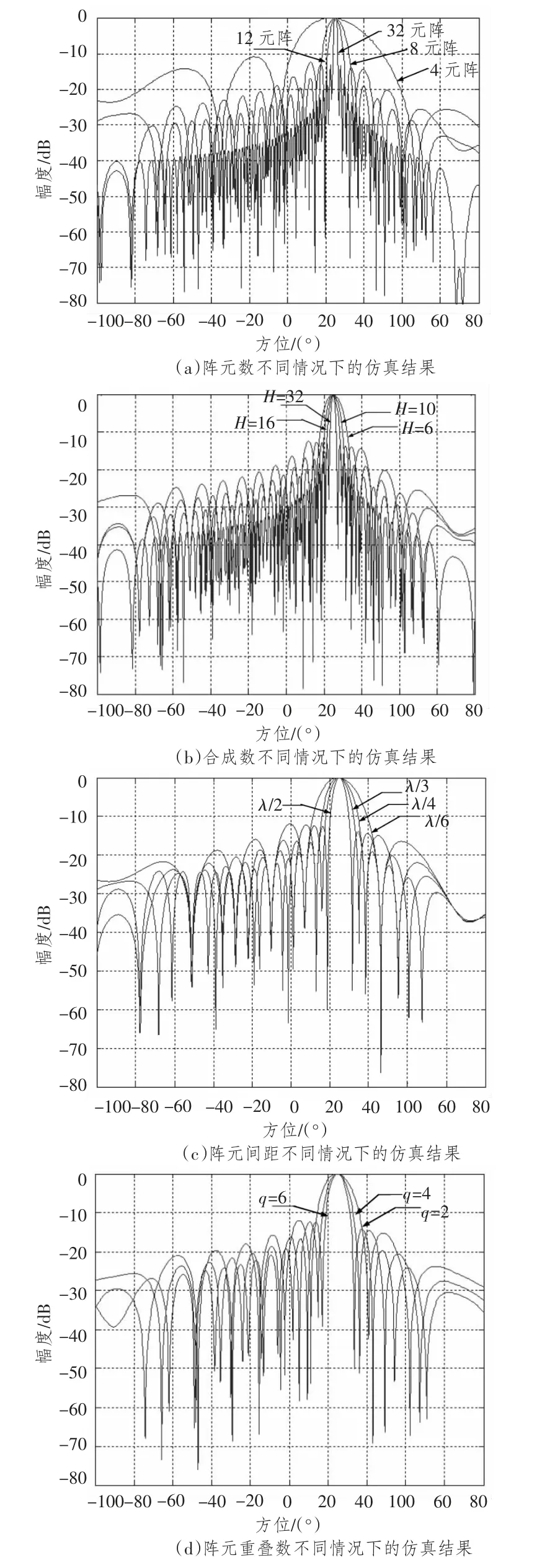
圖5 不同參數條件下的仿真結果Fig.5 The simulation results of different parameters
3 結 語
矢量陣被動合成孔徑技術將合成孔徑應用于矢量線列陣中,通過理論及仿真表明,該方法要優于常規聲壓陣列,它可以通過陣元數目較少的陣列,得到可以覆蓋多個倍頻程信號的大孔徑的虛擬陣列,具有更高的目標定位精度及可以獲得長陣具有的陣增益和方位分辨力,可以降低工程實施難度,適合低噪聲目標的輻射噪聲測量,具有良好的工程應用價值。
[1]王之程,程宗歧,于沨,等.艦船噪聲測量與分析(1 版).北京:國防工業出版社,2004.
[2]孫大軍.合成孔徑聲吶技術研究綜述[J].哈爾濱工程大學學報,2000(1):51-56.
[3]HALD J.Combined NAH and beamforming using the same array[J].B&K Technical Review,2005(1):11-39.
[4]白云.噪聲測量中矢量水聽器被動合成孔徑聲納方法研究[D].哈爾濱工程大學,2010.
[5]李瑞英.合成孔徑雷達動目標檢測與成像[D].哈爾濱工業大學,2010.
[6]GRAF H R.Deeonvolution techniques for imProved array resolution[J].Sixth Intemational Congress on Sound and Vibration.5-8 July 1999,Copenhagen,Denmark:829-836.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
