基于三點支撐的等效軸角調(diào)姿法
2014-12-08 03:19:26鄧忠林張哲沈陽航空航天大學航空航天工程學部遼寧沈陽110136
中國科技縱橫 2014年19期
鄧忠林 張哲(沈陽航空航天大學航空航天工程學部(院),遼寧沈陽 110136)
基于三點支撐的等效軸角調(diào)姿法
鄧忠林 張哲(沈陽航空航天大學航空航天工程學部(院),遼寧沈陽 110136)
為提高飛機大部件裝配質(zhì)量,充分發(fā)揮大部件對接并聯(lián)平臺的工作效率,計算驗證在小角度下通過等效軸角姿態(tài)調(diào)整方法,使圍繞參考坐標系坐標軸轉(zhuǎn)動三次減少為繞等效軸轉(zhuǎn)動一次的調(diào)姿方法依然準確有效,并根據(jù)計算定量的給出等效轉(zhuǎn)角與坐標值之間的變化關(guān)系,從而簡化軌跡規(guī)劃任務,最后通過螺旋理論舉例分析并聯(lián)調(diào)姿機構(gòu)的自由度,為以后并聯(lián)結(jié)構(gòu)調(diào)姿平臺的研究提供理論依據(jù)和技術(shù)基礎(chǔ)。
位姿調(diào)整 等效軸轉(zhuǎn)動 軌跡規(guī)劃 自由度
飛機大部件對接在總裝階段對接過程中要求對接部件姿態(tài)和位置快速精確的調(diào)整,調(diào)姿方法基于三點支撐,通過三個精密三坐標POGO柱互相協(xié)調(diào)運動,依次完成平動與轉(zhuǎn)動的姿態(tài)調(diào)整任務[1]。本文在調(diào)姿角度較小的情況下引入基于三點支撐的等效轉(zhuǎn)動方法調(diào)整對接部件姿態(tài),證明在小角度姿態(tài)調(diào)整下將原本需要繞三個坐標軸的旋轉(zhuǎn)運動合為繞空間等效軸線的旋轉(zhuǎn)運動的調(diào)姿方法是可行的,其運動軌跡映射到對接平臺所在坐標系后該運動軌跡在以等效軸為軸線的空間圓弧上;然后定量分析支撐點坐標與等效軸角的變化關(guān)系,最后使用螺旋理論舉例驗證由POGO柱組成的等效并聯(lián)機構(gòu)自由度滿足要求。
1 姿態(tài)轉(zhuǎn)換關(guān)系
奇異值分解法能夠較準確地計算兩個點集之間的位姿轉(zhuǎn)換關(guān)系[2]。其核心思想是計算是在兩個點集擬合后偏差最小的情況下,通過兩個點集的質(zhì)心求出轉(zhuǎn)化關(guān)系,這個轉(zhuǎn)化關(guān)系就是對接部件姿態(tài)調(diào)整所需要的旋轉(zhuǎn)矩陣R與平動矢量T。
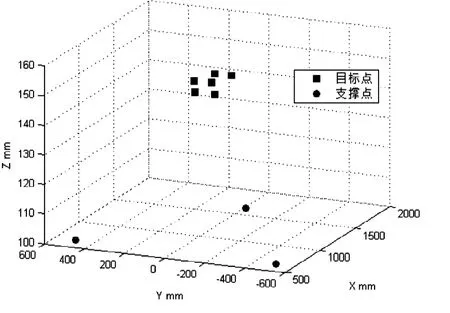
圖1 支撐點與{ Pt}Fig 1 Supported Points and { Pt }
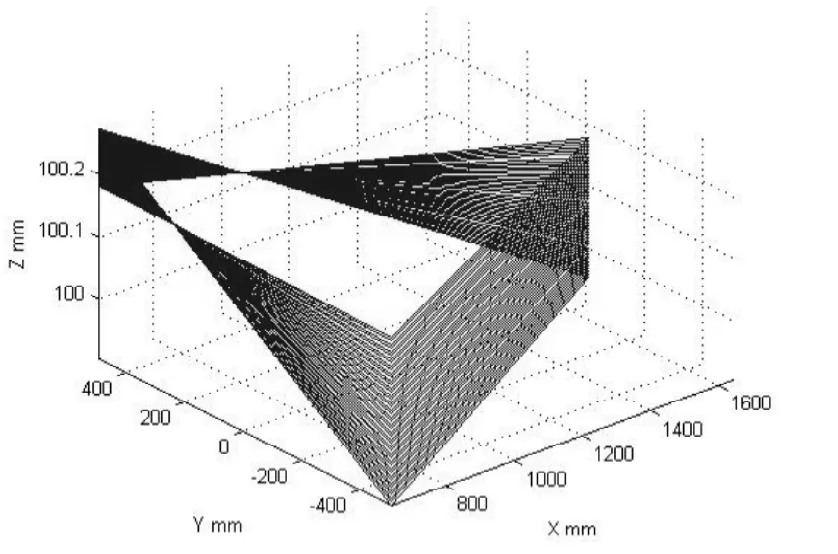
圖2 軌跡Fig 2 Trajectory

以上算法在 det(R)=1時成立,這里旋轉(zhuǎn)矩陣R與平動向量T為部件對接過程中姿態(tài)調(diào)整的轉(zhuǎn)換關(guān)系。
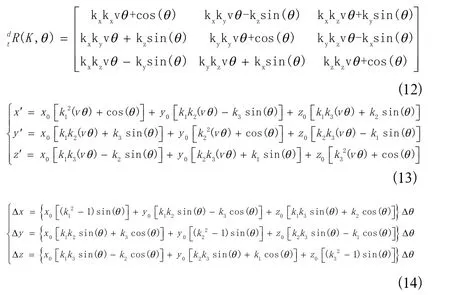
本文討論的等效軸角坐標系表示法是在空間中找到一個通過原點的一般轉(zhuǎn)軸,圍繞該轉(zhuǎn)軸轉(zhuǎn)動角度 θ使對接點集與目標點集重合后誤差最小,該軸線的單位向量由旋轉(zhuǎn)矩陣R反解出來,為了簡化問題,需要使目標點集與對接點集坐標系的原點重合,實際操作中通過該一般軸旋轉(zhuǎn)后使對接部件直接入位,由此會產(chǎn)生碰撞損壞部件,所以計算時先將對接點集在對接方向上平移矢量-1
RT,即先平移使兩點集中心重合,等效軸通過參考坐標系原點,然后進行旋轉(zhuǎn);但是實際對接過程中則是先旋轉(zhuǎn),再平移入位。
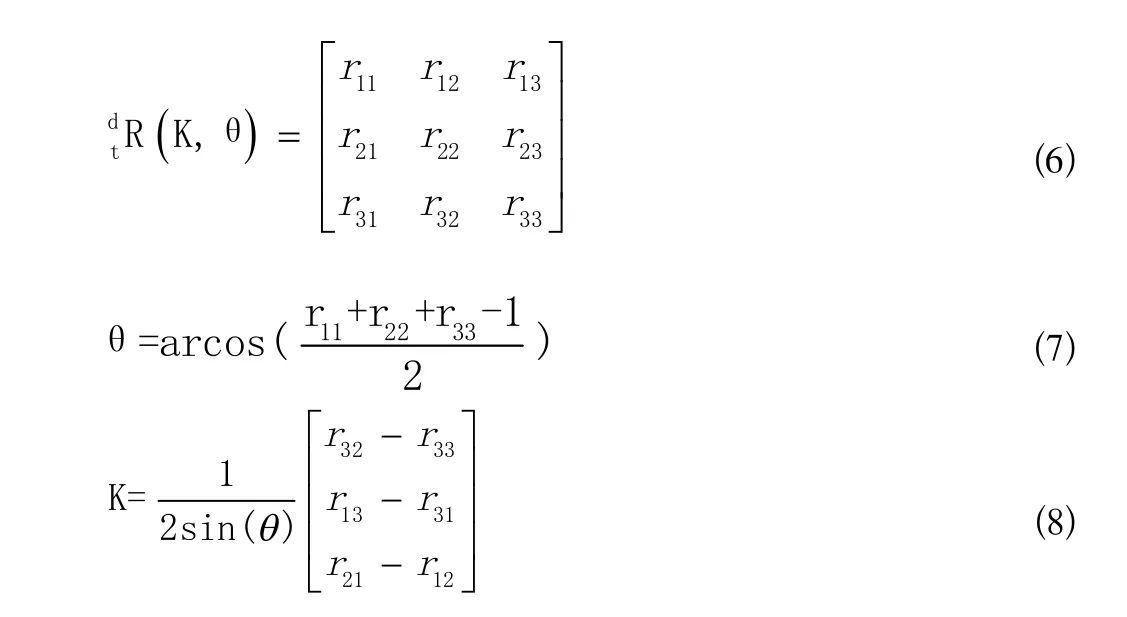
設(shè)矢量K為有限旋轉(zhuǎn)的等效軸,則對接點集相對于目標點集的一般姿態(tài)可用等效旋轉(zhuǎn)矩陣表示,當選擇目標點集坐標系的主軸作為旋轉(zhuǎn)軸時,等效旋轉(zhuǎn)矩陣變?yōu)槠矫嫘D(zhuǎn)矩陣。從一個給定的旋轉(zhuǎn)矩陣反求出單位向量K和旋轉(zhuǎn)量θ,公式(7)(8)總能計算出一個0°在到180°之間的值[6]。通過計算當
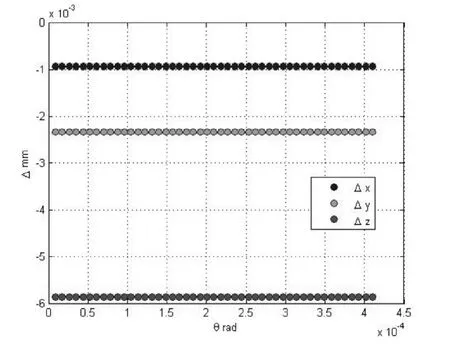
圖3 坐標值與 θ變化關(guān)系Fig 3 Coordinate Values and θ
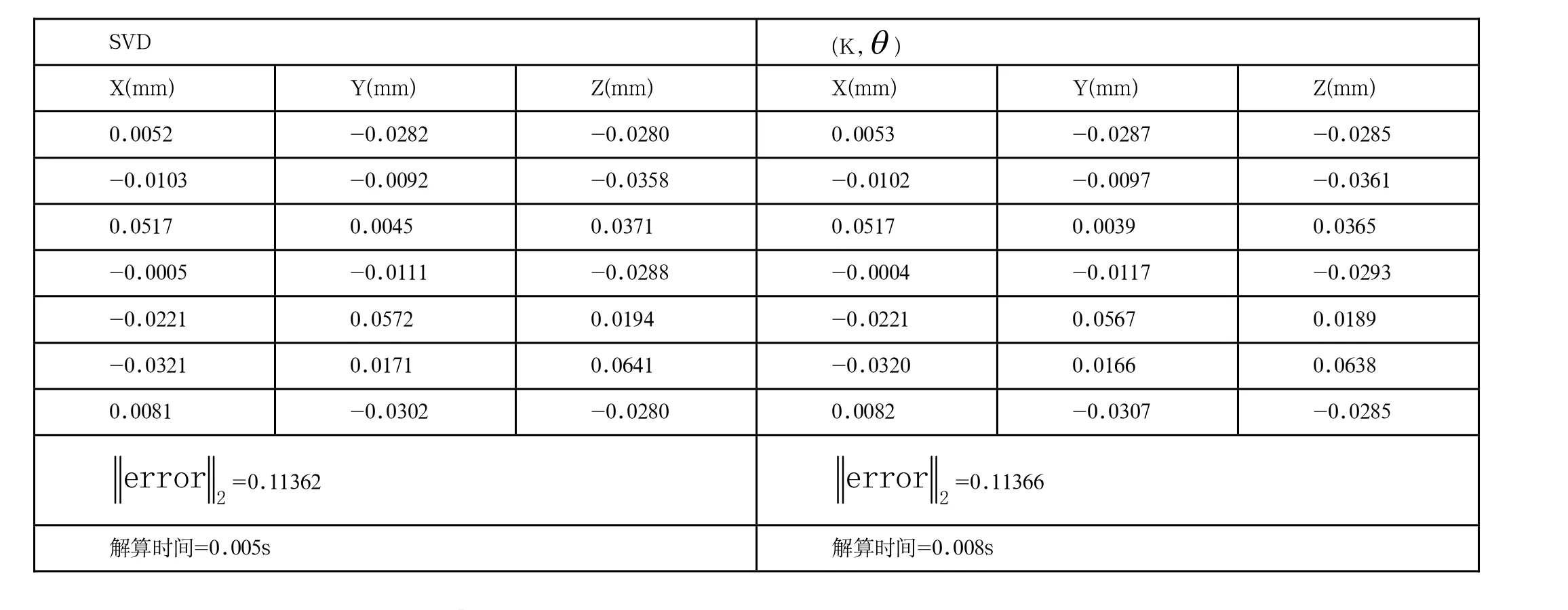
表1 兩種解算方法誤差比較Table 1 Comparison of Two Methods Error
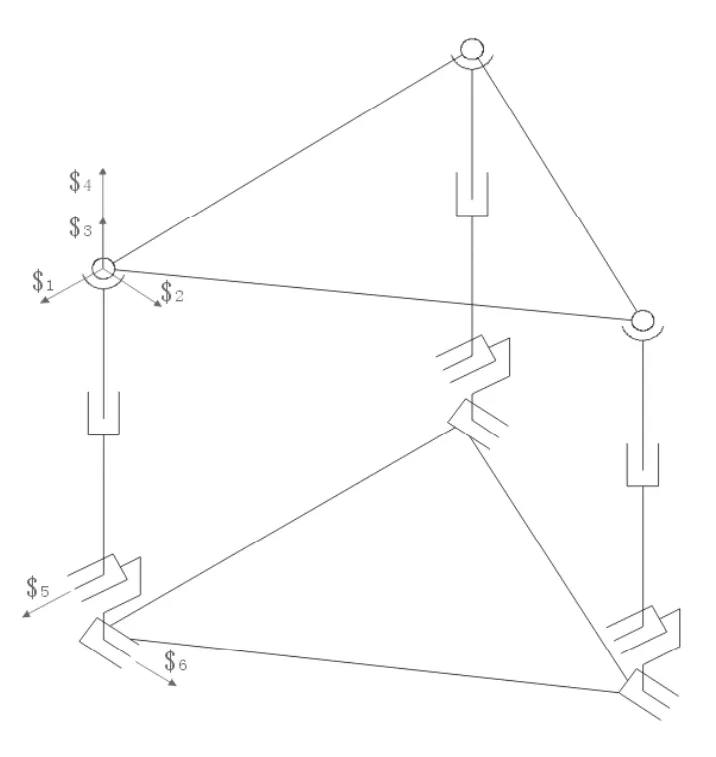
圖 4調(diào)姿原理Fig 4 Theory of the Posture Alignment
由其矩陣誤差的二范數(shù)判斷,在小角度情況下等效軸角坐標系法依然適用,可以找到穩(wěn)定的等效軸、角。
2 計算驗證
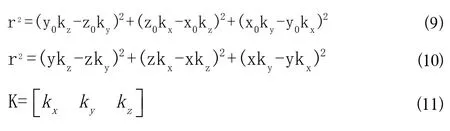
等效軸角 (K,θ)將繞坐標軸多次旋轉(zhuǎn)的問題轉(zhuǎn)化為繞空間一條直線旋轉(zhuǎn)的問題,則點集到點集的理論軌跡為以單位向量K所表示的空間直線為旋轉(zhuǎn)軸旋轉(zhuǎn) θ角的N段圓弧,N表示點集中點的總數(shù),由于各點到單位向量K的距離不同,所以其表示的圓弧軌跡半徑不同。點到單位向量K的直線距離由式(9)給出:
下面分別用高斯-勒讓德求積公式、迭代法驗證式(14):
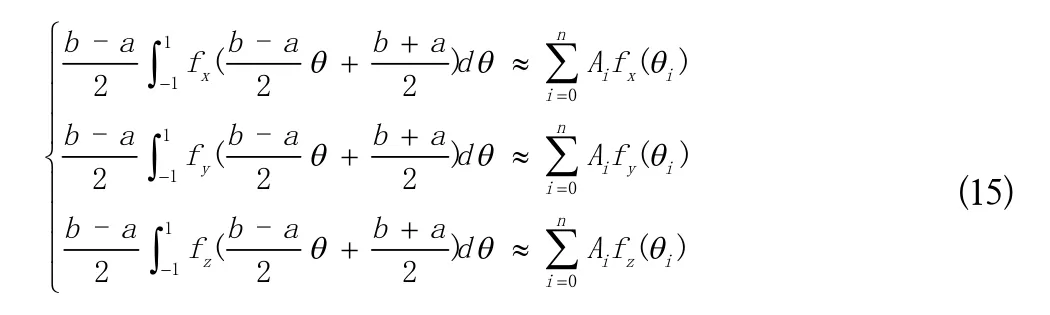
式(15)所得結(jié)果與點集{Pd} 比較,所得差值的二范數(shù)為0.11362,傳統(tǒng)SVD法所得結(jié)果與點集{Pd}比較,所得差值的二范數(shù)為0.11362,因此判斷可以使用式(14)表示坐標點 (x,y,z)與 θ的關(guān)系。
由于坐標的步長值在精密導軌可實現(xiàn)的精度范圍3μm附近,平均每3個步長就會造成可觀測的誤差積累,且調(diào)姿過程中各支撐點之間聯(lián)動誤差會在對接部件及其保型架內(nèi)產(chǎn)生內(nèi)應力,所以實際應用時需要權(quán)衡轉(zhuǎn)角控制精度的選取以符合執(zhí)行機構(gòu)要求。
3 自由度分析
以上計算要求并聯(lián)機構(gòu)實現(xiàn)三個平動三個轉(zhuǎn)動共6個自由度,下面以POGO柱和飛機大部件保型架組成的等效并聯(lián)機構(gòu)為例,分析該等效并聯(lián)機構(gòu)自由度是否滿足要求。
POGO柱、動平臺(對接大部件保型架)和靜平臺(臺架)組成等效并聯(lián)機構(gòu)如圖4所示。該機構(gòu)有三個分支,每個分支的起點是位于靜平臺上的移動副,向上聯(lián)接相垂直的移動副,這兩個運動副使POGO柱2D平動,再向上為沿著Z軸的移動副,最后與球副相聯(lián)。取其中一個分支建立坐標系,原點設(shè)為靜平臺上移動副初始值,Z軸通過球副中心向上,則該分支的運動螺旋如下:
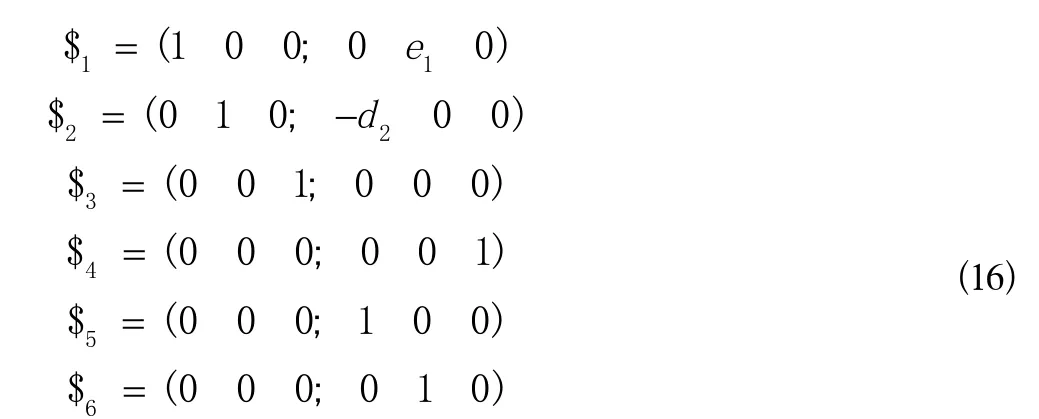
前三個表示球副,后三個表示移動副。由式(16)組成的系數(shù)矩陣的秩為6,所以判斷沒有公共的反螺旋,無局部自由度,無公共約束,使用修正的G-K公式計算該機構(gòu)的自由度如下:
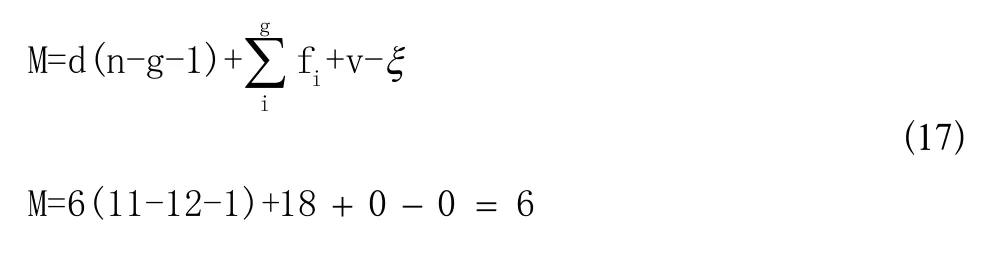
因此,POGO柱與保型架組成的等效并聯(lián)機構(gòu)可以實現(xiàn)三個平動和三個轉(zhuǎn)動共6個自由度。進一步檢查機構(gòu)自由度的全周性,發(fā)生微小位移后自由度保持不變,所以該機構(gòu)自由度具有全周性。
如果將球副替換為U型副,那么取其中一個分支建立坐標系,其運動螺旋如下:
由式(18)組成的系數(shù)矩陣的秩為5,該分支唯一反螺旋限制該分支頂點沿空間一固定矢量平動,三條分支不相交的三個反螺旋共同作用,等效于限制動平臺空間轉(zhuǎn)動,沒有線性相關(guān)的反螺旋作用在動平臺,所以判斷無公共約束,無局部自由度 ξ,則通過修正的G-K公式計算該機構(gòu)的自由度為3,只有空間平動的能力,不能滿足對接平臺6個自由度要求。
POGO柱、動平臺(對接大部件保型架)和靜平臺(臺架)組成的等效并聯(lián)機構(gòu)還需考慮超確定輸入問題,三個分支共需要9個輸入驅(qū)動,而空間調(diào)姿只有6個自由度,所以在組合時應選取其中6個為主要輸入,3個為配合輸入滿足一定的位型關(guān)系,例如滿足式(13);或者分階段首先選取3個Z向移動作為主要輸入,6個為配合輸入滿足一定的位型關(guān)系,然后選取X、Y向移動作為整體輸入,以此來處理超確定輸入問題。
4 結(jié)語
傳統(tǒng)的大部件對接過程姿態(tài)調(diào)整部分任務需要多步,并沒有完全發(fā)揮并聯(lián)平臺的效用。本文引入等效軸角坐標系表示法為支撐點的軌跡規(guī)劃提供理論依據(jù),同時驗證在小角度狀態(tài)下該方法依然有效,且解算時間在接受范圍內(nèi)。求得支撐點坐標與旋轉(zhuǎn)角之間的變化關(guān)系后,通過在實際精度條件下離散旋轉(zhuǎn)角得到該點坐標與等效角變化關(guān)系,并證明該離散方法與傳統(tǒng)方法理論上效用一致且路徑更短更平滑,最后舉例驗證等效并聯(lián)機構(gòu)能否滿足部件對接時的自由度要求,并說明POGO柱作為分支模塊并不是簡單疊加,需要考慮隨之帶來的超確定輸入問題。
本文討論在小角度下姿態(tài)調(diào)整問題,在成熟可靠的技術(shù)條件下可將平移距離縮短,使部件圍繞空間中一般單位向量旋轉(zhuǎn),相對于圍繞經(jīng)過參考坐標系中心的單位向量旋轉(zhuǎn)增加了旋轉(zhuǎn)半徑,使其軌跡更平滑,有效減少各支撐點聯(lián)動造成的誤差。該方法為飛機部件對接并聯(lián)平臺提供一定的理論依據(jù),但沒有引入實際執(zhí)行機構(gòu)的誤差模型,是否真正能夠應用于對接平臺有待實驗驗證。
[1]郭志敏,蔣君俠,柯映林.基于POGO柱三點支撐的飛機大部件調(diào)姿方法[J].航空學報,2009,30(7):1319-1324.Guo Zh M, Jiang Junxia, Ke Yinglin.Posture Alignment for Large Aircraft Parts Based on Three POGO Sticks Distributed Support[J].Acta Aeronautica et AstronauticaSinica, 2009, 30(7):1319-1324.
[2]Arun K S,T S Huang,S D Blostein. Least-Squares Fitting of Two 3-D Point Sets[J].Transactions on Pattern Analysis and Machine Intelligence, IEEE,1987,9(5):698-700.
[3]邱寶貴,蔣君俠,畢運波,等.大型飛機機身調(diào)姿與對接試驗系統(tǒng)[J].航空學報,2011,32(5):908-919.
Qiu Baoguo,Jiang Junxia, Bi Yunbo, et al.Posture Alignment and Joining Test System for Large Aircraft Fuselages[J].Acta Aeronautica et AstronauticaSinica, 2011,32(5):908-919.
[4]許國康.大型飛機自動化裝配技術(shù)[J].航空學報,2008,29(3):734-740.Xu Guokang. Automatic Assembly Technology for Large Aircraft[J].Acta Aeronautica et AstronauticaSinica,2008,29(3):734-740.
[5]王少鋒,張進華,劉志剛 等.大型飛機機身壁板裝配位姿調(diào)整系統(tǒng)的運動規(guī)劃[J].西安交通大學學報,2011,45(3):102-106.Wang Shaofeng,Zhang Jinhua,Liu Zhigang,et al.Motion Planning for Posture Alignment Machine Tool Oriented Fuselage Panel[J].Journal of Xi’an Jiaotong University,2011,45(3):102-106.
[6]John J.Craig. Introduction to Robotics: Mechanics and Control[M].Prentice Hall,3 edition,2006:44-51.
[7]黃真,劉婧芳,李艷文.論機構(gòu)自由度:尋找了150年的自由度通用公式[M].北京:科學出版社,2011.08.