礦井鉆孔測斜裝置研制
2014-12-13 07:44:46楊慶儲召銳湯捷
中國科技縱橫 2014年6期
關鍵詞:測量
楊慶 儲召銳 湯捷
(合肥工業大學,安徽合肥 230009)
礦井鉆孔測斜裝置研制
楊慶 儲召銳 湯捷
(合肥工業大學,安徽合肥 230009)
說明了裝置探頭和手持式同步機的硬件電路設計和軟件設計。通過實驗,對裝置的測量精度進行了驗證,在現場環境下,進行了實測試驗,驗證了裝置的功能。
測斜裝置 傳感器 探頭 同步機
1 引言
目前,許多礦井下使用的測斜儀在測斜方式上采用二次送入的方法,操作繁瑣,耗時耗力,影響鉆孔效率。我們在現用測斜儀的基礎上進行了改進,實現了隨鉆測斜,在鉆孔完成后即可得出鉆孔測斜參數,且可直觀顯示鉆孔軌跡曲線,方便快捷。根據測斜數據,及時分析,針對鉆孔出現情況即時調整鉆孔參數、指導鉆孔施工作業,提高鉆孔效率。
2 硬件設計
鉆孔測斜時,主要測量相應點的傾角、方位角、孔深,方位角和傾角測量時采用加速度傳感器和磁場傳感器組成的基于重力場與地磁場的姿態測量系統[1],孔深的大小一般用鉆桿鉆進長度來度量。三個加速度傳感器和三個磁阻傳感器分別沿載體坐標系三個軸安裝,構成最基本的鉆孔測斜裝置,如圖1所示。
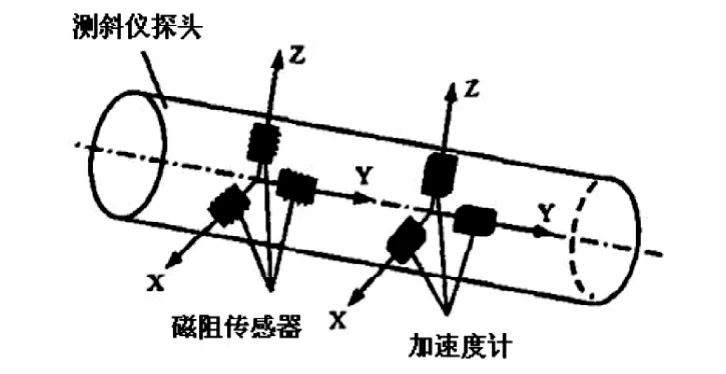
圖1 加速度計和磁阻傳感器安裝示意圖
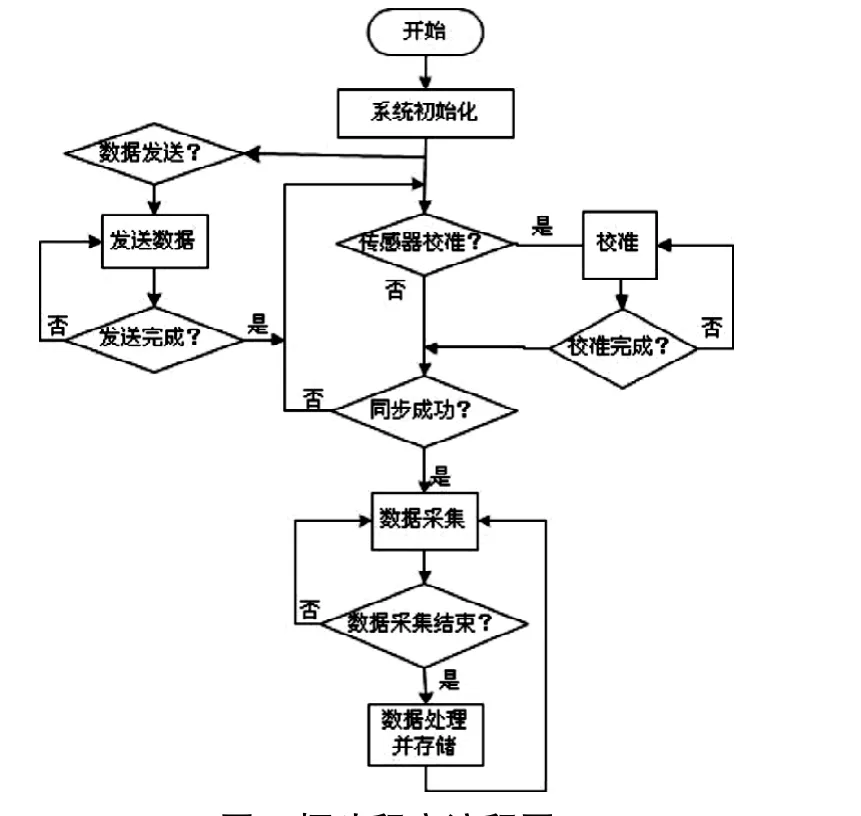
圖2 探頭程序流程圖
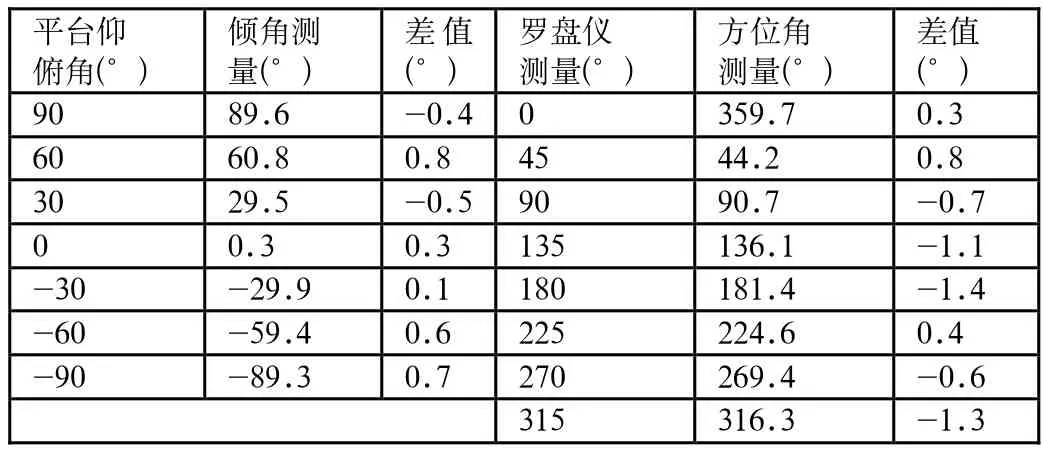
表1 傾角和方位角測量
該裝置的硬件主要包括兩個部分:探頭硬件電路設計和手持式同步機硬件電路設計。
探頭由DC/DC升壓穩壓器BL8530-50和低壓差微功耗型CMOS電壓穩壓電路HT7333供電,采用了集成有三個加速度計的三軸加速度傳感器ADXL345和集成有三個磁阻傳感器的三軸磁阻傳感器HMC5883L,實現了對重力加速度及地磁場在各個軸的分量的測量,以內存為32 Mbits的FLASH芯片AT45DB321D存儲器,以LPC1114微控制器為控制核心,對傳感器數字信號進行處理,將處理結果保存在存儲器中,最后根據接收到的手持式同步機發送的信息,將相應的數據經通訊模塊傳送給手持式同步機。
手持式同步機采用DC/DC升壓穩壓器輸出電壓可調的LM2577-ADJ芯片來得到5V電壓,3.3V由5V經低壓差線性調壓器LM1117-3.3得到,USB轉串口模塊采用轉換芯片CH340T,存儲模塊和探頭選用同樣的芯片,人機交互模塊由模塊按鍵操作模塊和液晶屏顯示模塊組成,以LPC1768微控制器為控制核心,實現各模塊功能。
3 軟件設計
鉆孔測斜裝置的硬件功能必須通過編寫軟件程序來實現,軟件設計主要包括兩個部分:探頭軟件設計和手持式同步機軟件設計。探頭軟件程序控制探頭硬件按照一定的順序來實現傳感器校準,完成測斜信息的采集、處理、存儲及傳輸,探頭程序流程圖如圖2所示。
手持式同步機程序設計部分主要包括手持式同步機程序運行環境的構建,主要有嵌入式實時操作系統uC/OS-II移植[2]、嵌入式應用的圖形接口軟件uC/GUI移植、FAT文件系統庫移植。在運行環境構建成功的基礎上進行了手持式同步機應用程序的設計,應用程序主要包括時間同步程序、數據讀取程序、軌跡曲線繪制程序、參數設置程序等。
4 實驗驗證
傾角精度驗證時,我們將探頭安裝在仰俯角可調的平臺上,每次調整30°進行測量,測量結果如見表1。方位角精度驗證時,以羅盤儀為標準每隔45°畫一條直線,然后再將探頭分別沿這些線放置,進行測量方位角,測量結果見表1。
為了驗證該裝置的功能,在設計完成后,進行了現場功能檢測試驗。選擇在井下17216運順進行功能驗證試驗,具體情況如下:設計參數:傾角-3°,方位角60°,孔深20m。根據穿透孔后情況測取實際傾角-3.5°,實際方位角61.5°,實際孔深19.5m。
測斜數據顯示測量傾角為-3.6°,鉆孔方位角62.0°,孔深19.9m。與實際測量數據相比,試驗孔傾角誤差0.1°,方位角誤差0.5°,孔深誤差0.4m,誤差很小。
5 結語
礦井下測斜裝置在實際測量時,主要測量的參數是傾角和方位角,實驗證明:該裝置方位角測量誤差范圍±2°,傾角測量誤差范圍±1°,滿足了設計要求。實現了隨鉆測斜,提高了鉆孔測斜效率,具有廣闊的市場應用前景。
[1]徐濤.水平定向鉆進隨鉆測量方法及定位技術研究[D].國防科學技術大學博士論文,2006.
[2]邵貝貝.uC/OS-II嵌入式實時操作系統[M].北京:北京航空航天大學出版社,2010.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00