為什么人造地球衛星能聽從地面指揮?
2014-12-25 02:29:12東方星
國際太空 2014年12期
關鍵詞:信號
眾所周知,人造地球衛星(簡稱衛星)上天后必須對它進行測量與控制,使地面控制人員及時了解衛星的運行軌道、衛星各系統的工作情況和各種工程參數,控制衛星上有關儀器正常工作,這些都是通過衛星上的測量與控制分系統來完成的,主要包括遙測、遙控和跟蹤測軌等裝置。
1 給衛星進行遠程體檢
衛星上都裝有遙測裝置,它用于采集衛星上各種設備的工作參數,并實時或延時發送給地面測控站,從而實現地面對衛星的監視。這是一套無線電信息傳輸系統,發信者是各被測對象,信息是各種被測對象呈現出來的物理或化學特性,通過溫度傳感器和壓力傳感器等遙測傳感器,把衛星上的各種信息變成電信號,然后把這些信號送入多路設備,最終以無線電波的形式傳到地面測控站。地面測控站經過接收、解調處理后還原成各種信息,就可了解飛行中衛星的各部分狀態。
在測量衛星參數的同時就把測量的量值傳輸到測控站叫實時遙測。但如果衛星運行在地面測控站接收范圍以外,遙測數據就無法實時傳送回地面,此時需用衛星上的記錄器先把所測的參數存儲起來,在衛星飛入地面測控站接收區時,再把已存儲的數據傳送下來,這叫延時遙測。所以,通過衛星上的遙測裝置和地面測控站,衛星專家可以知道遠在十萬八千里的衛星是否工作正常。
2 無形之手放飛太空風箏
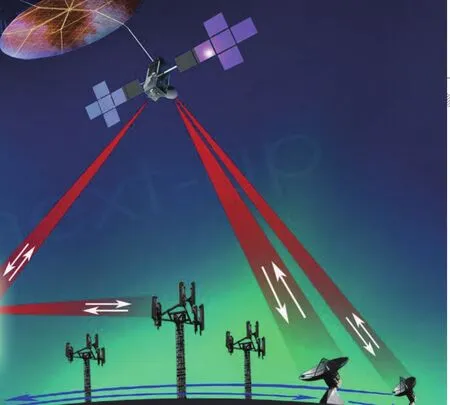
對衛星進行測控示意圖
向衛星發送命令,控制衛星正常運行,就如同在太空放風箏,不過,這里沒有風箏線,而是用衛星上的遙控裝置和地面測控站通過無線電波這一無形的手和線共同實施的。遙控裝置的功能與遙測裝置相反,用于接收地面的遙控指令,然后傳送給衛星上的有關設備來執行。它與在空中受控飛行的航空模型一樣,能接收地面上發來的各種控制信息,這些信息是以電信號的形式調制的無線電載波,衛星在接收解調后對衛星有關分系統進行控制。
衛星在天上飛行時經常需要完成某些動作,如讓星上記錄器記錄或下傳數據,讓采用自旋穩定方式的衛星起旋等,這些都是通過地面發送遙控指令給衛星來實施的。其過程如下:先用指令產生器把地面發向衛星的各項指令變成電信號;然后,用編碼器把這些信號編成碼組,以區別各種指令和保密;接著,把它們調制到無線電載波上,由發射天線發向衛星;衛星在接收到遙控信號后用解調器從載波中取出碼信號,再由譯碼器譯出所要執行的指令,最后放大-變換器去指揮相應的執行機構動作。
鏈接:由于衛星上的被遙測和被遙控的對象很多,不可能也沒必要為每一個信號都提供1個發射機或接收機,所以一般采用多路傳輸的方法,即把各種遙測、遙控信號綜合起來在1個載波信道內傳輸,即用衛星的1臺發射機或接收機進行收發。
跟蹤測軌裝置用于協同地面測控站,測定衛星運行的軌道參數,從而保持地面對衛星的聯系與控制。它與遙測和遙控不同,可分為光學跟蹤與無線電跟蹤兩種,由于前者受到天氣條件的限制,所以目前主要采用后者,即測量衛星與地面站之間的角度、距離和相對速度。其原理與用雷達搜索飛機相似,但由于衛星距地面較遠,因此還不完全相同,衛星的特點是裝有1個叫應答機的無線電收發信機。跟蹤測軌時,先由地面雷達向衛星發一個無線電脈沖信號;衛星上的應答機接收到這一信號后經放大立即向地面發出回答的無線電脈沖信號。這樣,地面雷達通過發出的脈沖信號和衛星的回答信號的傳播時間,就能算出衛星離地面雷達站的距離,并可根據雷達天線的仰角的方位確定衛星在太空的位置。
3 防止衛星迷航和翻滾
衛星在太空中飛行,會受到殘余空氣動力、微流星撞擊力、地球扁圓度引起的不均勻引力、太陽輻射壓力以及衛星內部的運動機構(如彈簧、發動機)等干擾力的影響,使衛星的姿態甚至軌道發生變化。另外,每種衛星都有自己特定的任務,因此在飛行時對它的飛行姿態都有一定的要求。比如,通信衛星上的拋物面天線和對地觀測衛星上的相機要始終對準地面,太陽觀測衛星上的望遠鏡要一直對準太陽。為此,衛星上裝有姿態控制和軌道控制分系統,它是衛星制導、導航與控制的重要組成部分。

采用自旋穩定方式的中國東方紅-2A通信衛星在軌飛行示意圖
鏈接:
在大型航天器上,如空間站,多用陀螺儀進行姿態控制,其精度和可靠性較高。它與反作用飛輪原理一樣,也是一種動量交換裝置,由繞其對稱軸高速旋轉的轉子、轉子軸的支撐框架以及框架伺服機構組成,有定軸性和進動性。陀螺儀通過框架的進動來產生陀螺控制力矩,抵消外部干擾力矩或按要求進行機動。其陀螺轉子的轉速是恒定的,但角動量方向是可變的,它通過改變角動量方向,即轉軸方向來產生控制力矩。
所謂衛星的姿態控制就是控制衛星的飛行姿態,保持姿態軸的穩定,并根據需要改變姿態軸的方向。由于各種干擾,衛星在空間的姿態角和姿態角速度往往會偏離設計值,這時就要進行控制和調整。
衛星姿態控制分系統有被動和主動兩種,其中被動控制的控制力不需要消耗衛星上的能源,而是用衛星的動力特性或空間環境力矩來提供,現在主要有自旋穩定等方式。主動控制是根據姿態誤差(測量值與標稱值之差)形成控制指令,產生控制力矩,實現姿態控制的方式,現在主要采用飛輪控制和噴氣控制等方式對衛星進行三軸穩定控制,即統稱為三軸穩定方式。由于主動方式適用于在各種軌道上運行的、具有各種指向要求的衛星,也可用于衛星的返回、交會、對接及變軌等過程,所以目前被大多數衛星廣泛采用。

中國“北斗”導航試驗衛星采用三軸穩定方式
自旋穩定方式是通過衛星本體圍繞1個軸轉動來保持穩定,很像小孩玩的陀螺。它的原理是利用衛星繞自旋軸旋轉所獲得的陀螺定軸性,使衛星的自旋軸方向在慣性空間定向,即通過高速旋轉來保持物體的轉軸方向不變。由于這種控制方式比較簡單,所以早期的衛星大多采用這種穩定方式。使衛星產生旋轉可以用在衛星表面沿切線方向對稱地裝的小火箭發動機,需要時就點燃小發動機,產生力矩,使衛星起旋;也可由末級運載火箭起旋。
三軸穩定方式是對衛星相互垂直的的三個軸都進行控制,不允許任何一個軸產生超出規定值的轉動和擺動。實現衛星三軸姿態控制的系統一般包括姿態敏感器、姿態控制器和姿態執行機構三部分。姿態敏感器有慣性敏感器、地球敏感器、太陽敏感器、星敏感器等,用于察覺和測量衛星的姿態變化,即衛星沿各個軸的轉動角度、轉動角速度有多大,是否超出規定的范圍。姿態控制器用于把姿態敏感器送來的衛星姿態角變化值的信號,經過一系列的比較、處理,產生控制信號輸送到姿態執行機構。姿態執行機構用于根據姿態控制器送來的控制信號產生力矩,使衛星姿態恢復到正確的位置。常用的執行機構有兩種:一種是采用反作用飛輪,當衛星的姿態處于所要求的姿態時,飛輪保持勻速旋轉,如果衛星偏離了某一位置,則飛輪加速或減速,產生一個相反方向的力矩,使衛星回復到所要求的姿態位置。衛星三個軸向各設置一個這樣的飛輪,就能控制衛星三個軸方向的姿態。另一種是采用推力器,即在衛星三個軸的方向安置若干個小的推力器,一旦衛星偏離所要求的姿態,相應方向的推力器就會噴出氣體,產生推力,使衛星回到所要求的姿態位置。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06