機場場監雷達數據處理技術研究
2015-01-01 03:19:02張煜婕李文娟陳建軍
現代雷達 2015年8期
張煜婕,李文娟,陳建軍
(1.南京電子技術研究所, 南京210039;2.南京理工大學電光技術學院,南京210094)
0 引言
民航業發展初期,各國對機場的監視和管理是通過塔臺管制員目視和地勤人員人為干預實現。隨著全球航空運輸業的飛快發展,機場內交通流量、布局的日益復雜,僅靠人為干預已經遠遠不能滿足機場管控要求。
基于對目標的雷達回波的測量、數據分析、建模和計算,場面監視雷達(Surface Movement Radar,SMR)可以確定運動目標的具體位置,實現航空器和車輛駕駛員在自己的航空器或車輛內就能看到自身所處的位置,以及周圍場面的運行狀況,在發生危險的時候能夠及時獲得報警信息。在此過程中,由于SMR是對機場區域進行探測,即對地俯視探測,因此在其探測范圍內將會受到大量強地雜波的干擾。再加上機場內人員、車輛移動狀態的機動性,障礙物遮擋,以及天氣等因素的影響,即使采用信號處理中常用的MTI或MTD技術后,虛警率依然很高,運用常規的目標跟蹤算法將會導致機場內目標錯跟、丟失,在機場發生事故時不能及時產生告警,釀成無可挽回的損失。為了解決以上問題,本文提出將檢測前跟蹤(TBD)技術應用于對SMR數據處理分系統中。TBD技術是一種針對低信噪比條件下信號的檢測和跟蹤技術,最初主要應用于紅外弱目標的檢測跟蹤,近年來TBD檢測算法也應用到雷達系統中。常用的TBD方法有基于Hough變換的直線航跡積累法[1-2],基于粒子濾波的遞歸方法[2-4]以及基于動態規劃的能量積累法[2,5-7]。
本文通過對民航機在機場場面運動的過程的分析,以及對大量實測數據積累和統計,將TBD技術應用于SMR的數據處理分系統中,在目標跟蹤過程中,依據事先存儲的機場地理信息和雷達回波信息,將機場區域分為機場跑道區、航跡不起批區、航跡禁止區,指導場內目標跟蹤模型選擇的同時,對不符合該區域允許的運動狀態的異常情況及時告警,保證機場及航空安全。
1 機場目標運動狀態及數據仿真
為簡便起見,以機場某條道路為例,如圖1所示,飛機在該道路上完成從滑行、轉彎,到靜止待命,直至加速起飛的全過程(降落是起飛的逆過程),根據機場道路功能的不同,將這條道路分為4塊,其中A為滑行道,B為滑行道與跑道連接處,C為目標靜止待命區,D為飛機起飛降落跑道。根據區塊功能的不同,目標按照不同的模型進行運動。以飛機起飛過程為例,飛機運動包含三種運動,在滑行道A上勻速運動(Constant Velocity,CV),在跑道與滑行道連接處B做勻速轉彎運動(Constant Turn,CT),在C區域靜止待命,在跑道D上勻加速運動(Constant Accelerator,CA)。各個運動模型在很多文獻中已進行多次給出,此處不再贅述。
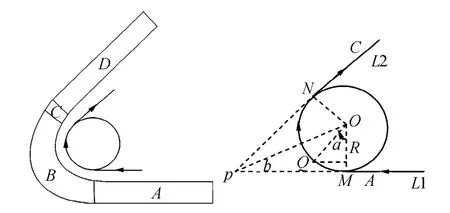
圖1 機場道路示意圖
以某飛行器起飛過程為例,如圖1右圖,L1和L2是兩條滑行道,其中L2為飛行器起飛跑道,它們之間夾角為b,轉彎圓弧半徑為R,PM方向為x軸正方向,L1與x軸重合,此時的坐標原點設為P點,即(x0,y0)=(0,0)。彎道的起始點M的坐標設為(xM,yM),彎道結束點N點的坐標設為(xN,yN)。過N點做L1的垂線,與彎道MN相交于Q點,MQ轉過的角度為a。飛行器起飛過程中走過的總路程為

設飛行器初始位置坐標為(x0,y0),具體起飛仿真過程如下
(1)滑行道勻速滑行階段:總滑行長度L1=x0-xM;
(2)勻速轉彎階段:
此時,yM=0,在x方向的坐標為

彎道結束點N點的坐標設為(xN,yN),其表達式為
飛行器在彎道上走過的弧長MN用下面的式子計算

(3)勻減速運動階段:
該階段直到飛行器速度減為0,走過路程為Sslip;
(4)靜止候命階段;
加速起飛階段:飛行器由速度為0到離地起飛,本文中設起飛離地速度為350 km/h,走過路程為Sup。

仿真場景如圖2所示,其中星點為雷達所在位置。
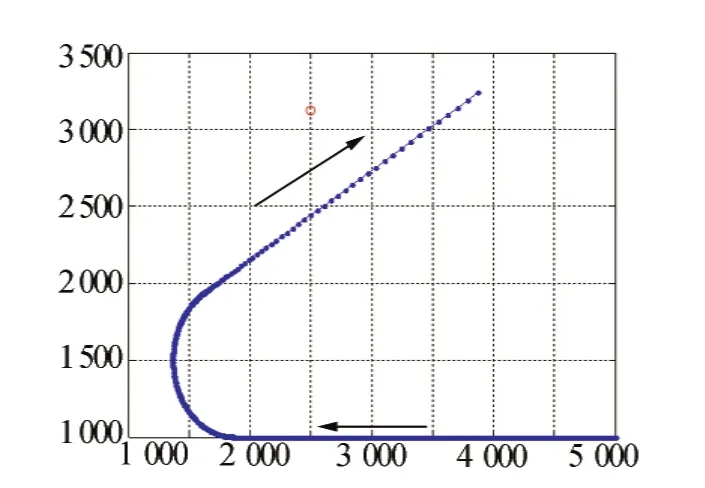
圖2 飛機起飛過程數據仿真
2 SMR數據處理關鍵技術
TBD基本思想是利用多周期積累數據,對目標所有可能的航跡進行遍歷、估計,當確認目標檢測結果后,檢測結果與目標航跡同時報出。其關鍵是對通過航跡關聯遍歷和延遲決策所產生的大量假設的暫態航跡進行及時判斷,刪除虛假航跡,保留真實航跡。對于航跡起始和航跡關聯的具體處理方法,文獻中已有詳細介紹,這里不再累述。TBD數據處理的基本流程如圖3所示。

圖3 TBD基本處理流程圖
處理過程對計算機硬件要求很高,需要多個服務器和存儲器來并行計算并存儲這些航跡,以滿足航跡關聯遍歷以及延遲決策的需要。再加上SMR對地探測中產生的大量剩余雜波,包括地面建筑物、人員車輛的運動狀態的機動、建筑物的遮擋、以及惡劣天氣產生異常回波等,都會產生大量虛假航跡,增加計算機硬件壓力,對航跡跟蹤產生不利影響。
由于SMR是針對機場場面進行監視,探測場景和探測對象都相對固定,機場場面布局圖、目標類型、運動狀態信息均可作為先驗信息,建立信息數據庫,參與到數據處理過程中,流程圖如圖4所示。
2.1 特殊航跡區處理
由于地物雜波剩余點跡、機場飛機點跡等點跡具有特殊的屬性,為減少虛假航跡的形成,通常根據機場場面布局圖設置特殊航跡區,對上述區域內的點跡進行相關處理時采取不同的準則或相關處理方法。本文中的特殊航跡處理區包括:不起批區、禁止區和機場跑道區等。
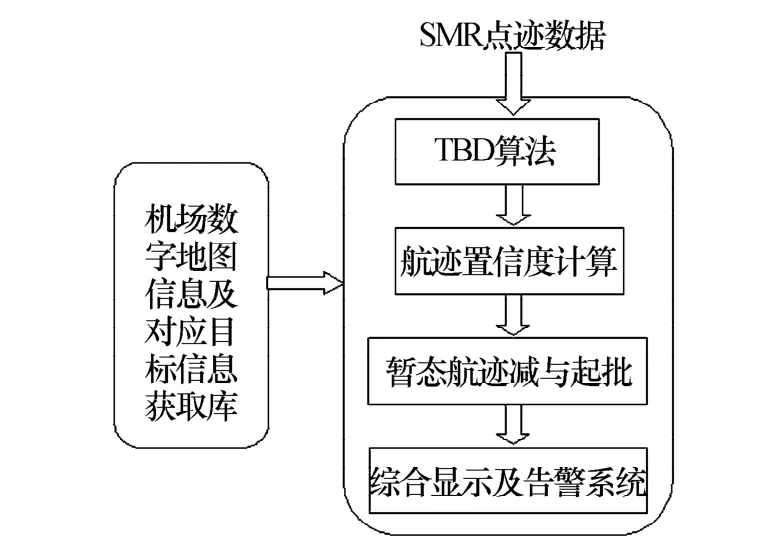
圖4 SMR數據處理流程
不起批區:在該區域內的點跡禁止形成新航跡但可用于航跡的更新。該區域主要對應目標受到建筑物遮擋區域,或目標經過剩余雜波集中的機場區域等情況。
禁止區:在該區域內的點跡禁止用于形成新航跡,若有穩定航跡連續多個周期(超過三次)與該區域內的點跡相關,并形成高置信度的航跡,則認為出現異常狀態,處理系統將向顯控系統提出告警。該區域主要對應機場內的建筑物區、草坪區等。
機場跑道區:利用區域內點跡進行航跡更新或形成新航跡遵循以下準則:(1)按照跑道區功能不同,采取不同的航跡跟蹤參數設置;(2)禁止目標點跡產生切向加速度。這樣可避免形成虛假航跡或航跡更新出現錯誤。
2.2 航跡置信度的設計
如何既利用TBD思想發現并準確跟蹤目標,又不會使計算機運算存儲量爆炸,本文采用如下關鍵技術:(1)對每條航跡遍歷其所有可能關聯的點跡;(2)設計合理的航跡置信度,逐幀刪除大量置信度低的暫態航跡;(3)建立完善的航跡起始和航跡撤銷邏輯,根據置信度自適應調整航跡起始、撤銷時間,使置信度低的暫態航跡起批時間長,置信度高的確認航跡維持時間長。
下面重點介紹一下航跡置信度的設置。
本文采用貝葉斯規則[7]與目標幅度特性、運動狀態平穩特性相結合,來計算航跡置信度[8-10]。
傳統的貝葉斯置信度定義P(D/T)為暫態航跡中量測數據為真實目標的幾率,P(D/F)為暫態航跡中量測數據為假目標的幾率,Lk為某條航跡在k時刻收到潛在目標信號的概率,P(T/Dk)表示組成這條航跡的序列量測數據Dk為真實目標的幾率,P(T/Dk)可以通過遞歸的方式給出[11]

為了計算Lk,我們首先計算P(D/T)和P(D/F),對于一個真實目標,P(D/T)等于系統的探測概率Pd與潛目標數據關聯的似然函數的積,假定在航跡點估計過程中,卡爾曼濾波器的殘差呈高斯分布,則似然函數可以定義為

M為量測數據的維數,對于SMR,M=2(距離、方位),X^(k|k-1)為卡爾曼濾波器中的目標狀態一步預測向量,Z(k)為量測向量,H(k)為量測矩陣,R(k)為量測協方差矩陣,P(k|k-1)為一步預測協方差矩陣。同樣的P(D/F)簡單地表示為潛在目標數據的虛警概率Pf乘以在門限區域Vg內均勻分布的虛警的似然函數1/Vg。
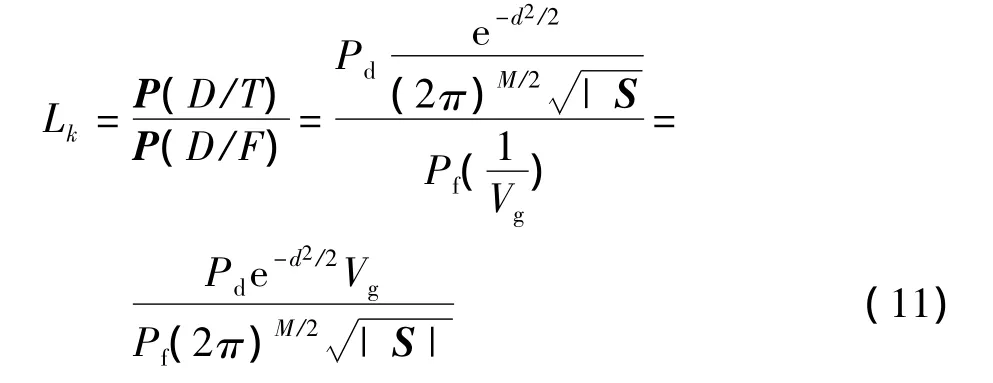
由于Pf=βfVg,其中βf為虛警或者雜波密度,此時Lk可以表示為

所需要的航跡置信度由式(13)計算得到。一般認為每次掃描探測到的潛在目標數據是相互獨立的,經過k次掃描后,具有對數形式的航跡評價函數Lk是每一次單獨掃描的航跡置信度的和,則航跡置信度可以通過遞歸的方法得出

對于新的航跡,可以通過下式來初始化航跡的置信度。

式中:βN為目標密度。
下面對航跡置信度的計算方法進行總結:航跡起批后利用公式(15)對每條航跡置信度進行初始化,在后續的每一個掃描周期,用公式(13)計算航跡置信度的增量,通過公式(14)逐掃描周期更新航跡置信度。
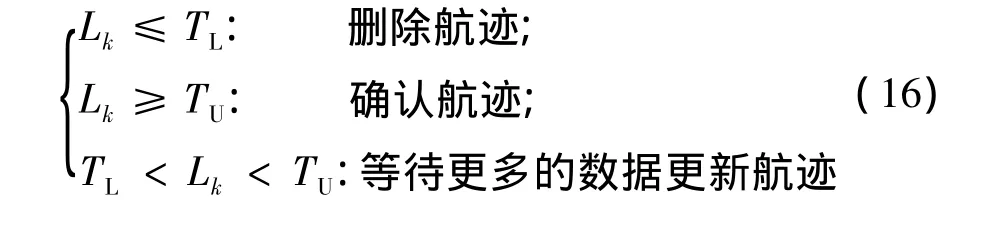
同時定義TL為航跡的刪除閾值,TU為航跡確認閾值,每一次數據關聯之后通過(14)計算出每一條航跡的置信度,然后通過序列幾率比測試判斷航跡的存在與否。序列幾率測試的判據如下
式(13)所示的傳統的航跡置信度,取決于目標預測值與量測值之間的距離d(當跟蹤濾波收斂時,S趨于一個固定值),即d值越小,目標量測值與航跡預測值越接近,說明該量測值與航跡關聯的概率越大[12]。
而本文中的暫態航跡點保留點跡的幅度信息、尺寸信息以及目標的速率、航向等信息,將這些信息用于航跡置信度的計算中,使暫態航跡的起批與刪減規則更加全面細致,更有說服力,同時對減少每幀數據的運算量效果明顯。以某條暫態航跡的N幀速率為例,我們認為真正的機場地面目標在某一區域內的運動速率是在一定范圍內的,設航跡中第i點的速率為 ,則N幀的速率均方差為

3 SMR數據處理結果分析
在事先建立的機場數字地圖的基礎上對機場區域按照不同功能分區,在各個區域中可能出現的目標類型、運動特性等信息建立數據庫,在數據處理的整個過程中,利用該數據庫信息,實現對已起批目標類型的識別、跟蹤,對虛假航跡的刪減,并對運動狀態異常的目標進行標示告警。
仿真3個飛行器降落、起飛的過程。設飛機起飛跑道長度2.5 km,離地速度為350 km/h,轉彎半徑500 m,兩跑道之間夾角為60°,滑行道長度3.1 km,滑行速度為20 km/h,仿真過程持續1 102 s,雷達掃描周期為1 s。以雷達為坐標原點進行仿真。其中有3個飛行器目標,目標運動情況如表1所示。
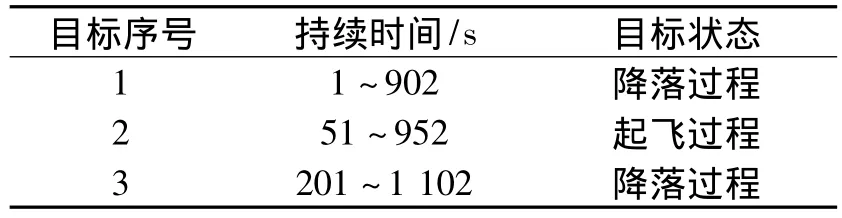
表1 三個目標仿真狀態
處理結果如表2所示,其中原始虛警密度指每一幀數據中平均虛警點的密度。對于三種虛警密度的情況,算法對目標都有較好的跟蹤性能,且對虛警抑制效果很好,對于速度變化范圍大、虛警點多的機場環境,基于TBD的數據處理算法對目標也有良好的跟蹤性能。
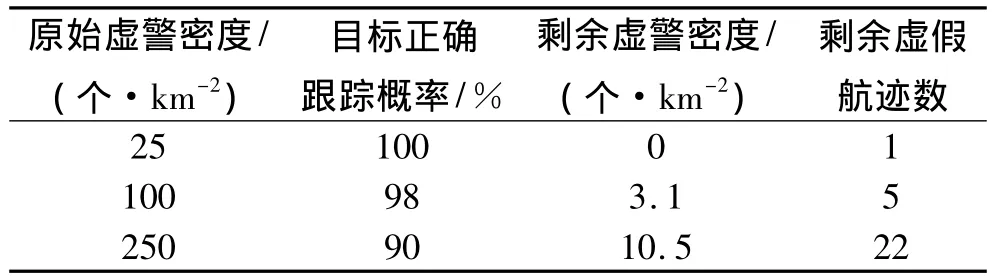
表2 仿真數據處理結果
采用以上算法對國內某機場上多種情況實測數據進行處理。圖5所示的是兩架在機場中運動過程的跟蹤結果。為了便于觀察,本文將目標的航跡點結果進行像素擴展。左圖為一架客機由起點出發,經過轉彎滑行至飛機跑道起點,并靜止等待起飛指令的過程;右圖為一架貨機由機場的機庫出發,經滑行道至跑道起點,經過靜止等待、加速滑行直至最后起飛的全過程。下圖表明,對于機場中處在不同運動狀態的飛機目標,該算法均表現出良好的跟蹤性能。
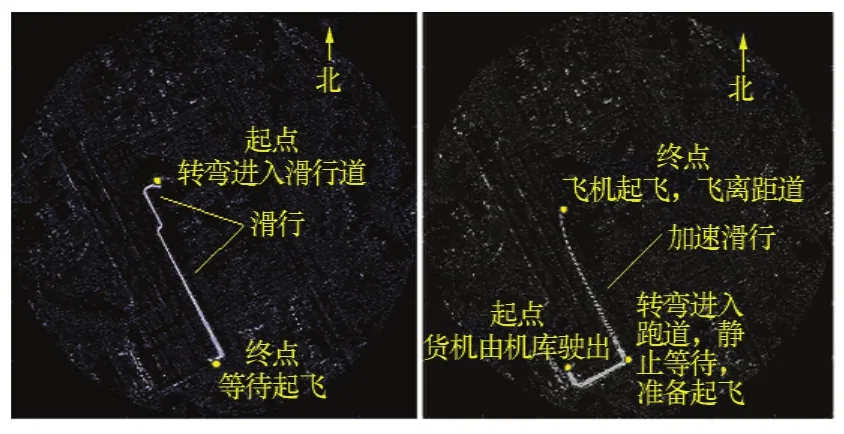
圖5 對某機場上兩架飛機的跟蹤結果
4 結束語
本文針對機場場監雷達的實際需求,分析并仿真機場內民航機起飛過程,針對機場內地面目標運動模型多樣,虛警率高的缺點,探討了基于TBD思想的場監雷達數據處理算法,為了解決算法中計算量和存儲量爆炸的問題,采取機場特殊區域處理措施,對特殊區域內的航跡進行特殊處理,同時監控目標的運動狀態,在發生異常狀態時,及時對后續顯控告警系統報告,產生告警,確保機場及飛機的安全;因此,設計新的置信度計算方法,既保證大量虛假目標逐幀刪減,又確保真實目標的連續跟蹤。經過仿真數據以及某機場實測數據的驗證,該算法在保證較低運算量和存儲量的同時,對目標具有良好跟蹤性能,可應用于工程實踐。
[1] Carlson B D,Evans E D,Wilson S L.Search radar detection and tracking with the hough transform.Part I:system concept[J].IEEE Transactions on Aerospace and Electronic System,1994,30(1):102-108.
[2] 張承志,任清安.一種利用TBD自動檢測低慢小目標的方法[J].空軍預警學院學報,2013,27(2):118-121.Zhang Chengzhi,Ren Qingan.Method of auto-detection of LSS target by using TBD technology[J].Journal of Air Force Radar Academy,2013,27(2):118-121.
[3] Rutten M G,Gordan N J,Maskell S.Recursive track-before-detect with target amp latitude fluctuations[J].IEE Proceeding Radar,Sonar and Navigation,2005,152(5):345-352.
[4] Boer Y,Driessen J N.Multi-target particle filter track-before-detect application[J].IEE Processing Radar,Sonar and Navigation,2004,151(6):351-357.
[5] Arnold J,Shaw S,Pasternack H.Efficient target tracking using dynamic programming[J].IEEE Transactions on Aerospace and Electronic Systems,1993,29(1):44-56.
[6] Tonissen S M,Evans R J.Performance of dynamic programming techniques for track-before-detect[J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(4):1440-1451.
[7] 宮淑麗,王幫峰,吳紅蘭,等.基于IMM算法的機場場面運動目標跟蹤[J].系統工程與電子技術,2011,33(10):2322-2326.Gong Shuli,Wang Bangfen,Wu Honglan,et al.Tracking of moving targets on airport surface based on IMM algorithm[J].Systems Engineering and Electronics,2011,33(10):2322-2326.
[8] 呂小平.空中交通管理文集[M].北京:航空工業出版社,2009.Lü Xiaoping.The corpus of air traffic management[M].Beijing:Aviation Industry Press,2009.
[9] 金 文.場面監視雷達的應用與發展[J].中國民用航空,2011,129(9):48-50.Jin Wen.The application and development of surface monitoring radar[J].China Civil Aviation,2011,129(9):48-50.
[10] 霍振飛.高級機場場面活動引導控制系統介紹[J].空中交通管理,2011(8):4-5,16.Huo Zhenfei.Introduction to advanced-surface movement guide and control system[J].Air Traffic Management,2011(8):4-5,16.
[11] 何 友,修建娟等.雷達數據處理及應用[M].2版.北京:電子工業出版社,2009.He You,Xiu Jianjuan.Radar data processing with applications[M].2nd ed.Beijing:Publishing House of Electronics Industry,2009.
[12] 曾 斯.多機動目標跟蹤中數據關聯算法的研究[D].成都:電子科技大學,2011.Zeng Si.A study on data association algorithms of multitarget tracking[D].Chengdu:University of Electronic Science and Technology of China,2011.
猜你喜歡
心理學報(2022年4期)2022-04-12 07:38:02
今日農業(2021年9期)2021-11-26 07:41:24
水泵技術(2021年3期)2021-08-14 02:09:20
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
當代化工研究(2016年9期)2016-03-20 16:22:13
電測與儀表(2015年5期)2015-04-09 11:30:52
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
測繪科學與工程(2013年3期)2013-03-11 15:07:36