基于穩性實時計算技術的船舶破損智能扶正系統研究
2015-01-03 07:34:28劉朕明嚴一超林嘉昊姜廣煜
船舶 2015年4期
劉朕明 嚴一超 林嘉昊 姜廣煜
(中國船舶及海洋工程設計研究院 上海200011)
引 言
船舶在運營過程中存在觸礁、碰撞等破損事故的風險,而且由于事故的突發性往往使事態迅速惡化并造成巨大損失和人員傷亡。所以如何讓決策者及時了解和掌握船舶的基本狀況,并迅速制定出正確有效的扶正方案來恢復船舶的穩性和姿態將直接影響破損事故最終結果。但在實際決策過程中,需要耗費大量時間查閱繁雜的圖表資料和各類相關監控系統的數據信息,難以迅速地掌握實時狀態。此外,利用裝載手冊、破艙穩性計算書之類的圖表文件也只能進行單艙或典型艙組的進水計算,這將使決策者無法準確地分析船舶的破艙穩性和平衡浮態,從而影響制定扶正方案等相關決策的有效性,導致船舶損害進一步加劇甚至沉沒。
NUCAS系統是依托中國船舶及海洋工程設計研究院自主開發的擁有完全自主知識產權的船舶初步設計系統。該系統采用自頂向下面向對象設計技術,船舶穩性實時計算技術等多項先進技術,能滿足各大船級社對普通船型的總體性能分析計算精度要求。
船舶破損智能扶正系統以NUCAS系統中的船舶穩性實時計算技術為基礎,研究設計船舶實時狀態三維模型數字化算法和船舶破損智能扶正方案生成算法,旨在通過以船舶液位遙測系統和進水報警系統的實時數據為主要輸入,根據船舶的三維數字化模型通過系統的核心算法分析計算船舶的大傾角穩性、剪力彎矩、破艙穩性和平衡浮態,并能提供一套包含壓載水調撥措施與步驟建議的智能扶正方案,提高船舶破損事故的處理能力。
1 系統原理
由于船舶破損事故的突發性,船舶破損智能扶正系統在日常航運時就需要實時監測液位遙測數據和進水報警信號,并根據液艙的液位狀態通過船舶實時狀態三維模型數字化算法分析計算船舶穩性狀態、剪力彎矩狀態和靜水力特性,然后依據船級社規范要求校核分析結果對不符合要求的項目予以聲光報警。
當監測到進水報警信號時,系統根據通訊協議判斷破損艙室名稱,自動建立破損艙室組合,并應用船舶實時狀態三維模型數字化算法分析計算破艙穩性和平衡浮態;然后,系統自動加載扶正方案智能生成模塊,運用船舶破損智能扶正方案生成算法快速搜索出較合理的壓載水艙調撥方案,并根據搜索出的最優方案形成實施步驟建議,指導船員對扶正方案的操作流程。[1]
圖1為船舶破損智能扶正系統的作業流原理圖。整個系統以液位遙測數據和進水報警信號作為主要輸入,經過應用NUCAS系統中船舶穩性實時計算技術的船舶實時狀態計算分析模塊輸出船舶裝載匯總、平衡姿態、實時穩性狀態、剪力彎矩狀態和規范校核結果,再通過加載融合遺傳算法的扶正方案智能生成模塊輸出一套包含壓載水調撥措施與步驟建議的智能扶正方案,最終通過電子文檔報告和局域網發布等輸出形式將船舶裝載情況、船舶平衡姿態、實時穩性狀態、剪力彎矩狀態、規范校核結果和扶正方案迅速傳遞給相關船員[2]。
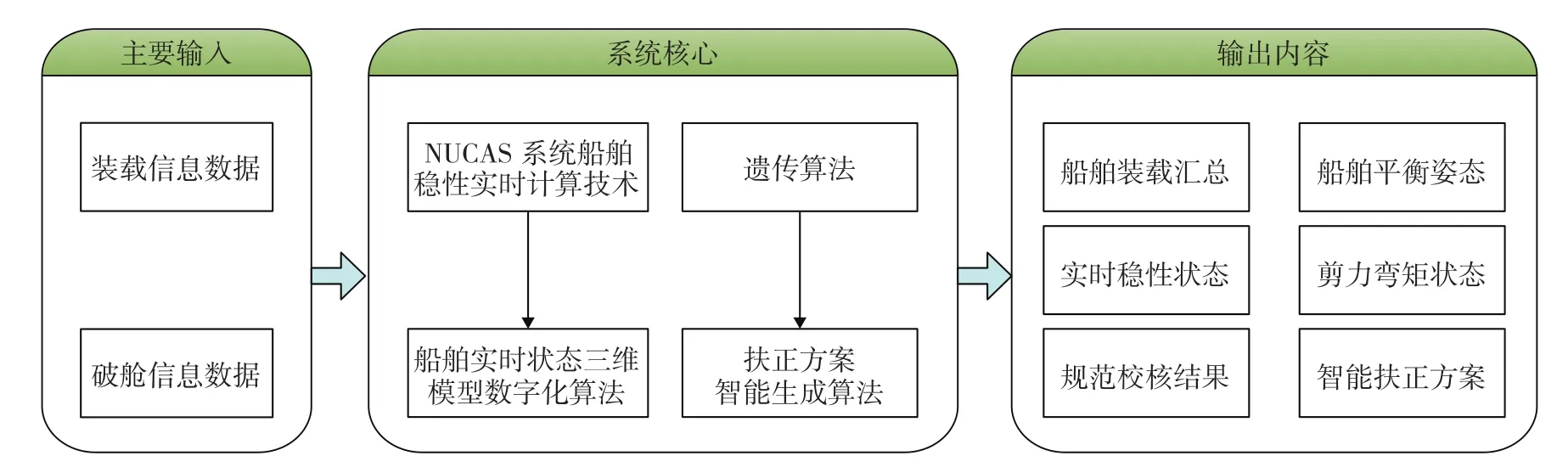
圖1 系統作業原理圖
2 核心算法研究
2.1 船舶實時狀態三維模型數字化算法
船舶實時狀態三維模型數字化算法需要船舶三維數字化模型作為支撐,運用數值積分方法準確地計算出水線面以下的船體體積和體心,即浮心和浮力。然后將重力重心和浮力浮心迭代平衡公式至滿足精度要求,迭代流程圖見下頁圖2。
對于船舶橫傾狀態的分析計算則通過計算船舶各種假定橫傾角下的復原力臂值,并繪制成靜穩性曲線,即可求得復原力臂值為零時所對應的橫傾角,也就是船舶平衡狀態下的橫傾角。
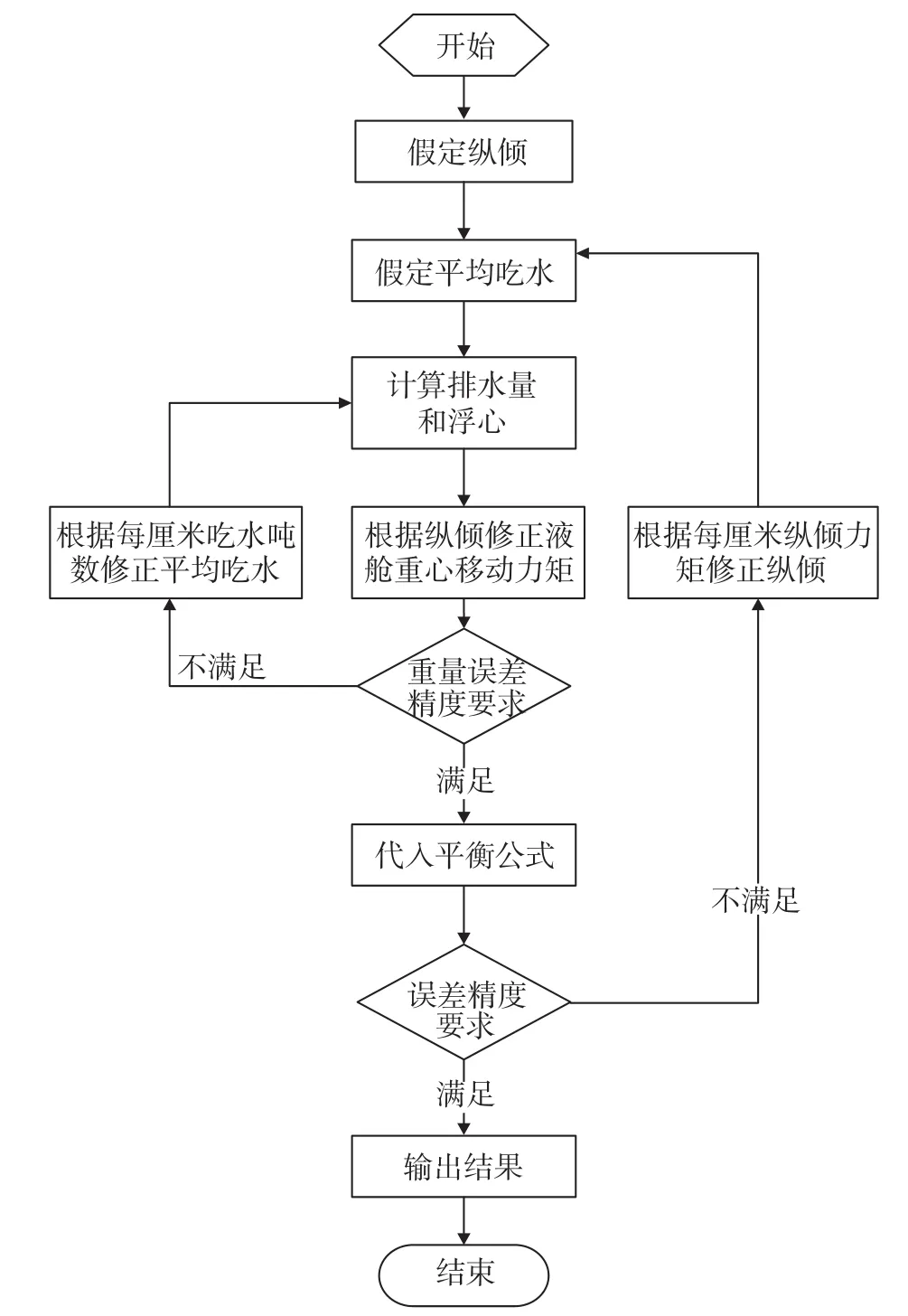
圖2 船舶實時狀態三維模型數字化算法迭代流程圖
由于在整個迭代流程中存在多重循環嵌套,所以準確且快速地計算出水線面以下的船體體積和體心是關鍵,而船體體積和體心的求解過程可以轉換為沿船長方向對每個橫剖面面積和面心的縱向積分。因此,橫剖面的面積和面心求解速度和精度直接影響整個算法的快速性和準確性。
為在確保計算精度的條件下提高運算速度,需要研究設計一種計算數據存儲模型,要求不僅能記錄存儲經過B樣條加密處理的橫剖面邊界點的三維坐標數據,還能關聯該點沿橫剖面外輪廓線對X軸面積積分和面心積分的數值結果,在計算橫剖面面積時,運用S=S梯形ABCD-SADOE-SBCOE快速求出總面積(式中SADOE和SBCOE即為在A點和B點所生成的計算數據存儲模型中所關聯的面積值)(見圖3),從而避免重復計算提高算法效率,面心求法也類似。
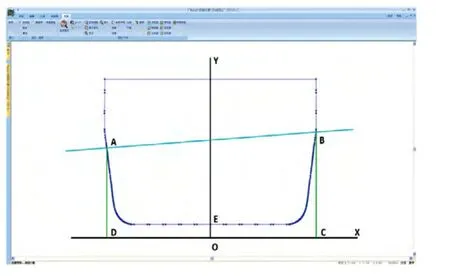
圖3 面積算法示意圖
2.2 扶正方案智能生成算法
扶正方案智能生成算法根據船舶的實時裝載和破損情況,對若干壓載水艙注入水或排出水,改善船舶的平衡浮態和破艙穩性。由于遺傳算法具有不依賴梯度信息,有良好的并行性和全局優化性能,是解決非線性復雜實際問題的方法,因此扶正方案智能生成算法以遺傳算法原理為基礎,采用染色體編碼的方式,快速搜索出全局最優解[3-5]。
(1)設計變量
X= [x1,x2,…,xn]T,其中xi為第i個壓載水艙,且每個壓載水艙的狀態可以分為:灌滿水、抽空水、不操作和已破損。
(2)目標函數
(3)約束條件
xi= 不破損,因為已經破損的壓載水艙不能成為扶正艙。
(4)染色體
vk= [vk1,vk2,…,vkn]T。其中k= 1,2,…,m,vki∈{a,b,c},式中vki為第i個未破損可被扶正的艙,n為染色體長度(即一共有n個可被扶正的艙),m為染色體的總數稱為群體規模,a表示該壓載水艙被灌滿,b表示該壓載水艙被抽空,c表示對該壓載水艙不操作。
(5)適應度函數[1]

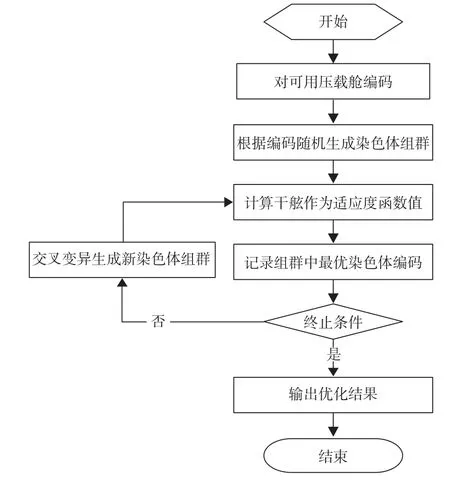
圖4 扶正措施方案生成算法迭代流程圖
扶正方案智能生成算法根據得出的扶正措施方案快速分析每步操作對船舶穩性、浮態以及剪力彎矩的影響,從而得出壓載艙操作步驟的順序并形成以船舶破損后平衡浮態與艙名排序相結合為內容的扶正步驟建議[7]。
總之,船舶實時狀態三維模型數字化算法提供的船舶各種狀態下的吃水、浮態等分析結果為扶正方案智能生成算法奠定了基礎,而扶正方案智能生成算法又融合了遺傳算法,使其成為一套能夠完成船舶實時狀態三維模型數字化算法無法完成分析計算的核心算法。
3 系統設計
根據船舶破損智能扶正系統的作業原理,系統的硬件設備組成框圖如圖5所示。
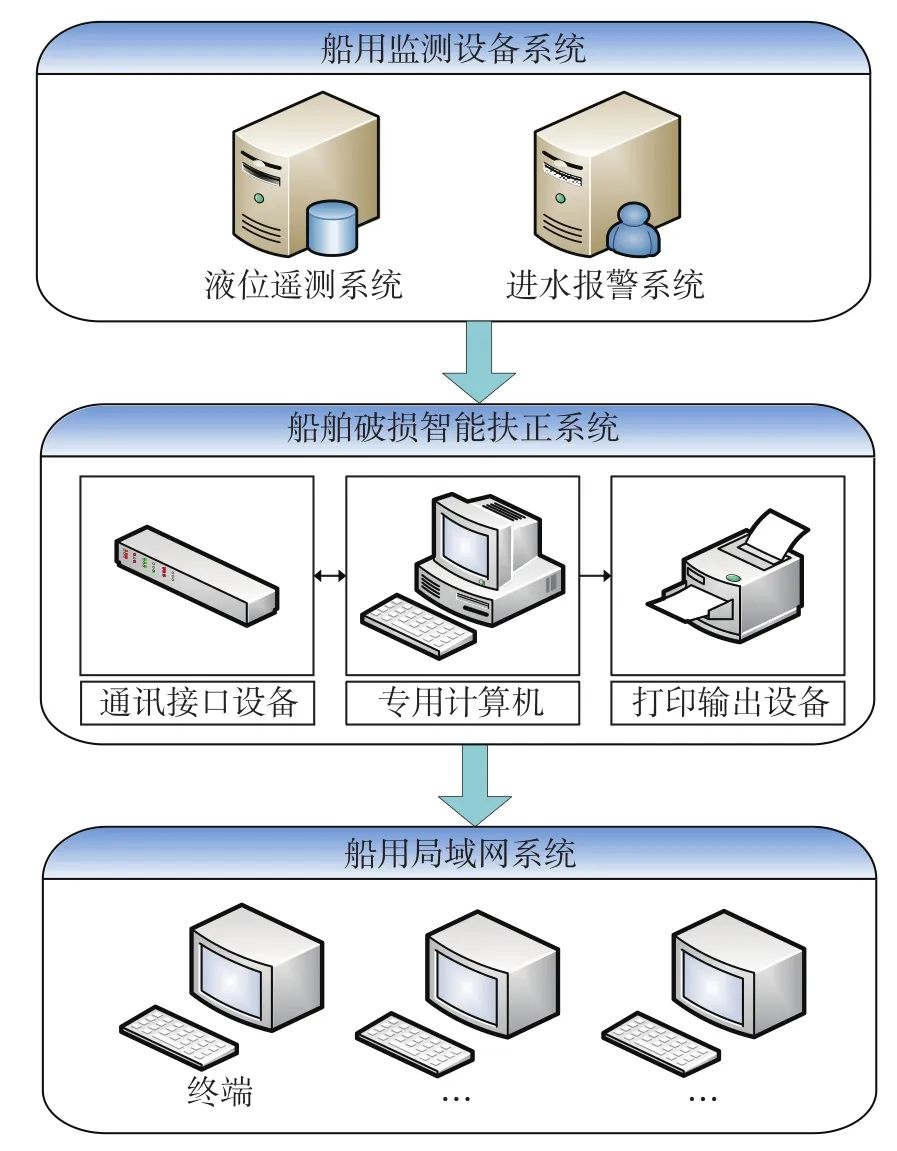
圖5 硬件設備組成框圖
通訊模塊主要負責接收液位遙測數據和進水報警信號以及發送方案結果至局域網系統,專用計算機則通過安裝船舶破損智能扶正系統軟件來處理通訊模塊接收到的數據,并能輸出打印文檔報告以及向局域網系統輸出方案結果信息。
專用計算機系統軟件主要通過實現船舶實時狀態三維模型數字化算法和扶正方案智能生成算法這兩項核心算法來支撐整個船舶破損智能扶正系統的核心計算分析功能。其中:通過對船舶實時狀態三維模型數字化算法軟件開發編制船舶實時狀態計算分析模塊,使系統能完成船舶浮態、穩性、強度等分析計算功能;通過對扶正方案智能生成算法軟件開發編制扶正方案智能生成模塊,使系統能完成扶正方案智能生成功能。軟件運行界面如下頁圖6所示。軟件模塊組成框圖如下頁圖7所示。
圖6 軟件運行界面
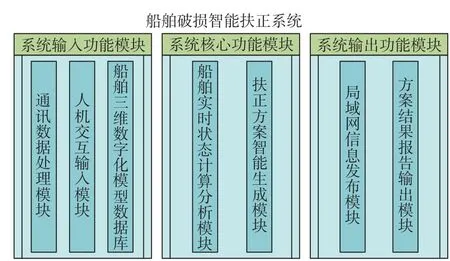
圖7 軟件模塊組成框圖
(1)通訊數據處理模塊:根據通訊協議將液位遙測數據和進水報警信號轉化為系統內部所需的數據結構。
(2)人機交互輸入模塊:提供友好的表格輸入界面用于修改海水密度、液艙密度、固定質量、其他質量等船用監控設備系統未涉及的數據信息。
(3)船舶三維數字化模型數據庫:通過NUCAS系統中復合建模技術建立船舶的數字化模型,并存儲為只讀的模型數據庫形式,為船舶實時狀態計算分析提供基礎數據信息。
(4)船舶實時狀態計算分析模塊:通過研究船舶實時狀態三維模型數字化算法實現船舶實時狀態計算分析功能。
(5)扶正方案智能生成模塊:采用扶正方案智能生成算法快速搜索出較優的壓載水艙調撥方案,并根據調撥方案給出實施步驟建議。
(6)局域網信息發布模塊:將系統分析得出的方案與結果通過接口協議驅動通訊接口設備輸出至局域網系統。
(7)方案結果報告輸出模塊:將系統分析得出的方案與結果以圖表結合的電子報告形式輸出,并能通過打印設備紙質輸出。
4 結 論
船舶破損智能扶正系統通過研究應用NUCAS系統中的船舶穩性實時計算技術,具備快速分析船舶穩性實時狀態的能力;并融合遺傳算法,實現智能化生成包含壓載水調撥措施與步驟建議的扶正方案;從而滿足船員在突發破損事故時制定方案決策的實際要求,提高船舶破損事故的處理能力,具有顯著的實際應用價值。目前,船舶破損智能扶正系統已經應用于多艘海監船,運行情況良好。
[1] 曹才軼,嚴家文,蔡新功.基于遺傳算法的船舶破艙穩性扶正措施優化研究[J].中國造船,2008(2):36-40.
[2] 李炳煌,浦金云,陳曉洪.構建艦船抗沉智能決策支持系統[J].船海工程,2006(2):81-83.
[3] 玄光男,程潤偉.遺傳算法與工程優化[M].于歆杰,周根貴,譯 .北京 :清華大學出版社,2004.
[4] 柳存根,裘永銘,姚震球,等.遺傳進化算法在船舶初步設計中的應用[J].上海交通大學學報,2000 (1):41-45.
[5] LEEKY,HANSN ,ROHMI.Optimal compartment layout design for a naval ship using an improved genetic algorithm[J].Marine Technology,2002(3):159-169.
[6] 盛振邦,楊尚榮,陳雪深 .船舶靜力學[M].北京 :國防工業出版社,1979.
[7] 陸叢紅,林焰,紀卓尚.遺傳算法在船舶自由浮態計算中的應用[J].上海交通大學學報,2005 (5):701-705.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
