船舶復雜混合動力推進軸系振動研究
2015-01-04 06:24:48能齊周瑞平
船電技術 2015年11期
楊 震,肖 能齊,周瑞平,林 晞 晨
(武漢理工大學能源與動力工程學院,武漢430063)
0 引言
船舶混合動力推進系統主要是由機械推進系統部分和電力推進系統組成[1-3]。混合動力推進系統與傳統的推進系統相比較,結構、功能更加復雜,使得復雜混合動力推進軸系的振動研究存在大量未解決或值得考慮的問題。本文以某船舶混合動力推進軸系為研究對象,分析其運行工況及振動機理,建立混合動力推進系統振動數學模型并進行振動計算,對混合動力推進系統的低噪聲設計理論研究及工程設計具有一定的指導意義。
1 復雜混合動力推進系統
該推進系統為四機雙槳混合動力推進系統,其由2臺9L48/60B柴油機I(功率為10350 kW,轉速為514 r/min)、2臺6L48/60B柴油機II(功率為6900 kW,轉速為514 r/min)、2臺GWVH減速齒輪箱、1臺軸帶發電機(PTO)、1臺電動機(PTI)、傳動軸系、2個螺旋槳、變頻器和配電板等組成。如圖1所示的某船舶四機雙槳+PTO/PTI復雜混合動力推進軸系示意圖。
該推進系統具有多種運行工況,根據其營運工作模型可以劃分為單機模式、雙主機并車模式和PTI模式三類,如表1所示。該系統在PTI模式下帶有軸帶發電機推進系統的柴油機I或者柴油機II運行,通過傳動軸系驅動螺旋槳工作;同時軸帶發電機發電機發電經配電板驅動電動機(PTI)運動,通過傳動軸系驅動螺旋槳工作。該PTI模式中驅動電動機的電力來源于推進柴油機,而非柴油發電機。
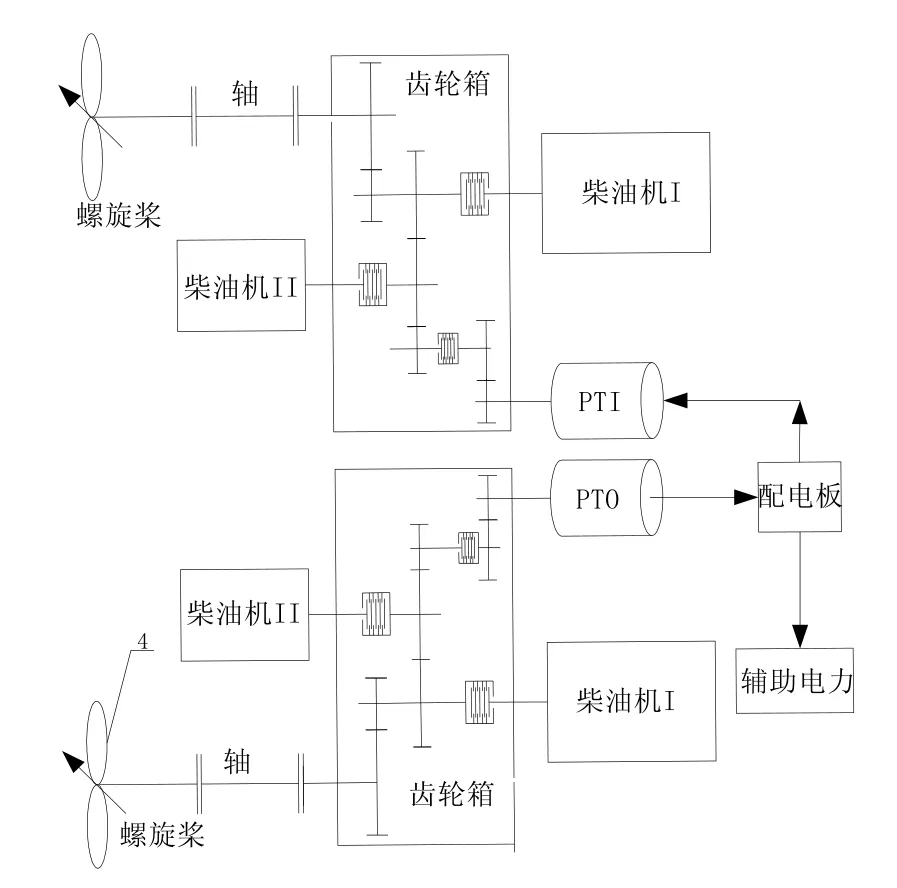
圖1 某船舶四機雙槳+PTO/PTI復雜混合動力推進系統示意圖
2 數學模型的建立與振動機理研究
2.1 扭轉振動機理研究與模型的建立
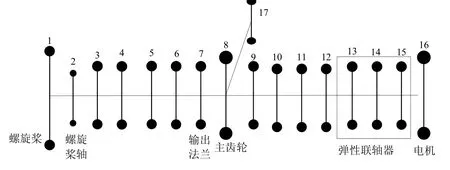
圖2 柴 油機 I-齒 輪箱-螺 旋槳+軸 帶發電機(P TO)+電 動機(P TI)當量系統圖
復雜混合動力推進軸系扭轉振動與傳統的推進軸系扭轉振動相比,前者在計算過程中涉及的因素更多,振動機理更加復雜,因此對其進行更加精確的計算顯得更加重要。復雜混合動力推進軸系扭轉振動激勵源包括考柴油機氣體壓力和慣性力作用產生的激勵力矩、螺旋槳不均勻伴流場產生的激勵力矩以及電機運行過程中所產生的電磁激勵力矩對軸系扭轉振動的影響[4-6]。
根據表1所示的推進系統工作模式及軸系扭振激勵源的分類,主要研究PTI模式Mod7、單機模式Mod3和雙機雙槳模式Mod6三種運營模式。根據軸系扭振當量系統集總參數模型的簡化原則,可以得到上述三種工作模式下的復雜混合動力推進系統的扭轉振動當量系統模型,如圖2-4所示。特別強調對于第三種工作模式柴油機僅為電動機運行提供電力來源。
2.2 回旋振動及校中機理研究與模型的建立
船舶推進軸系回旋振動的激勵力主要包括旋轉螺旋槳的不平衡離心力、螺旋槳上流體激振力以及螺旋槳偏心質量產生的激振力[7-8]。對于帶齒輪箱傳動軸系,按照回旋振動計算模型簡化原則從軸系螺旋槳至傳動齒輪箱大齒輪而組成的含有若干集中參數的鏈狀分布系統。
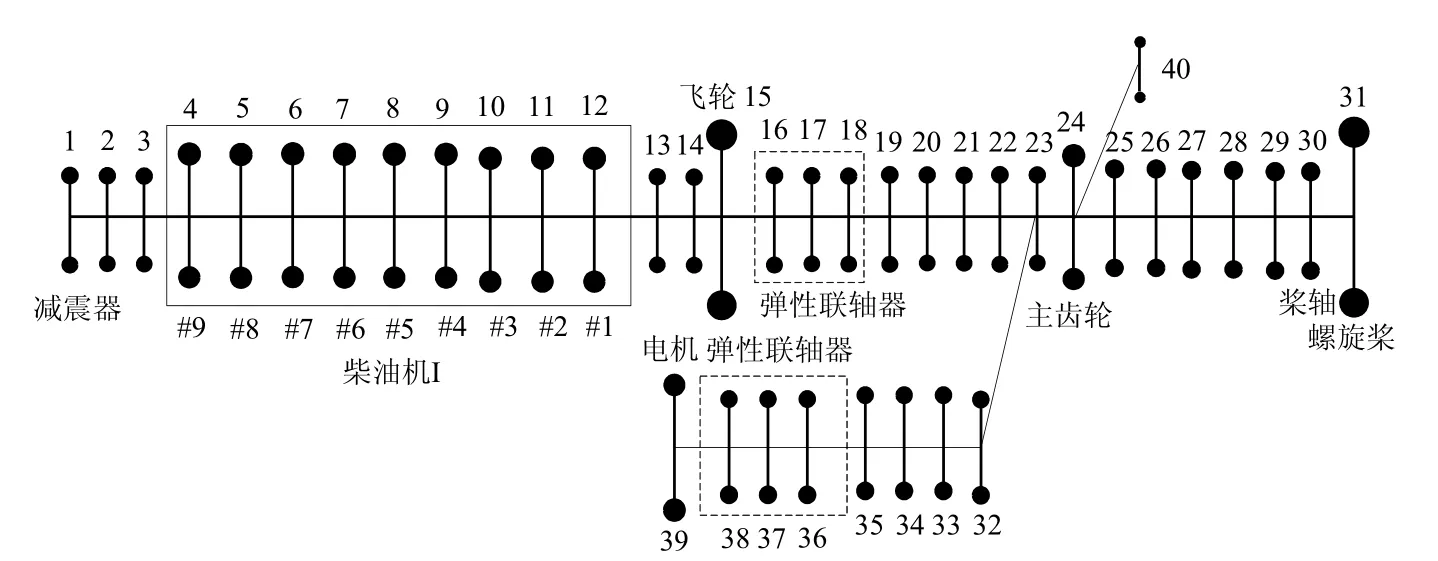
圖3 柴油機 I-齒 輪箱-螺 旋槳+軸 帶發電機(P TO)當量系統圖
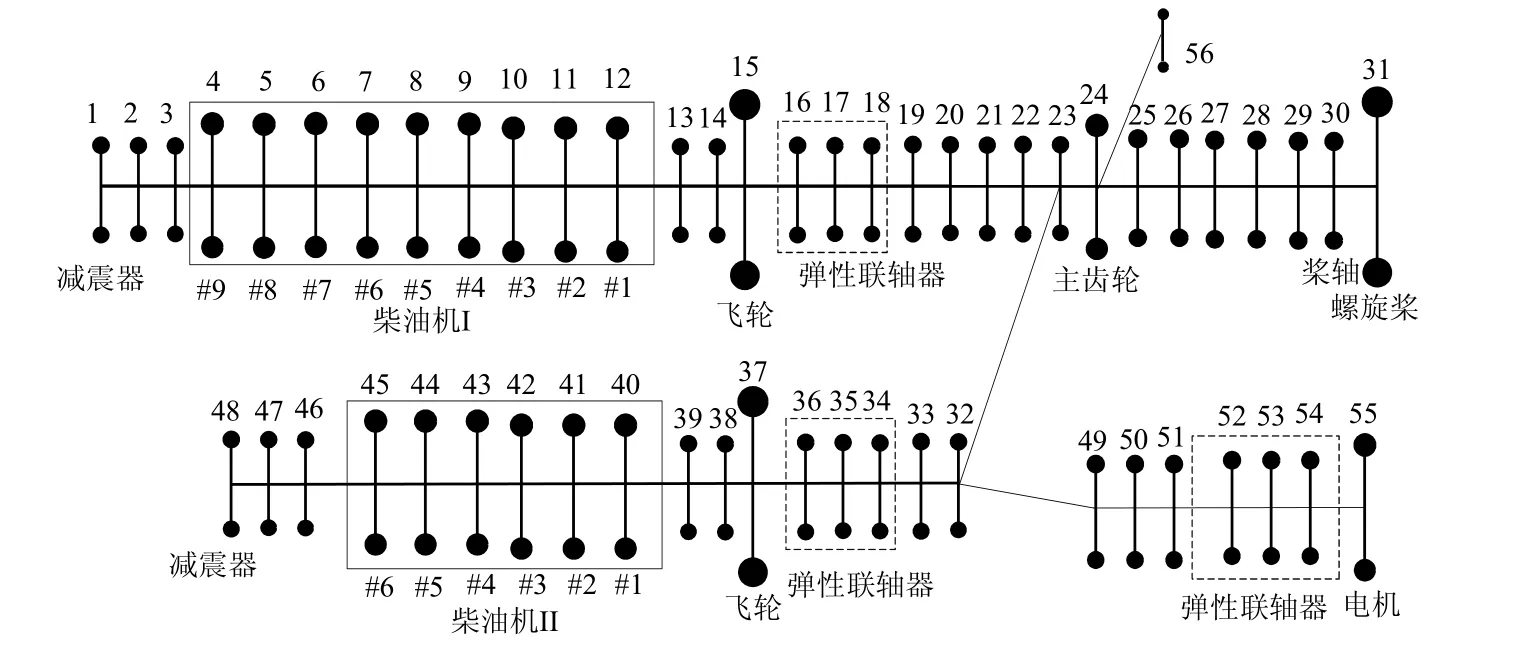
圖4 柴 油機I和 II-齒 輪箱-螺 旋槳+軸 帶發電機(P TO)當量系統圖
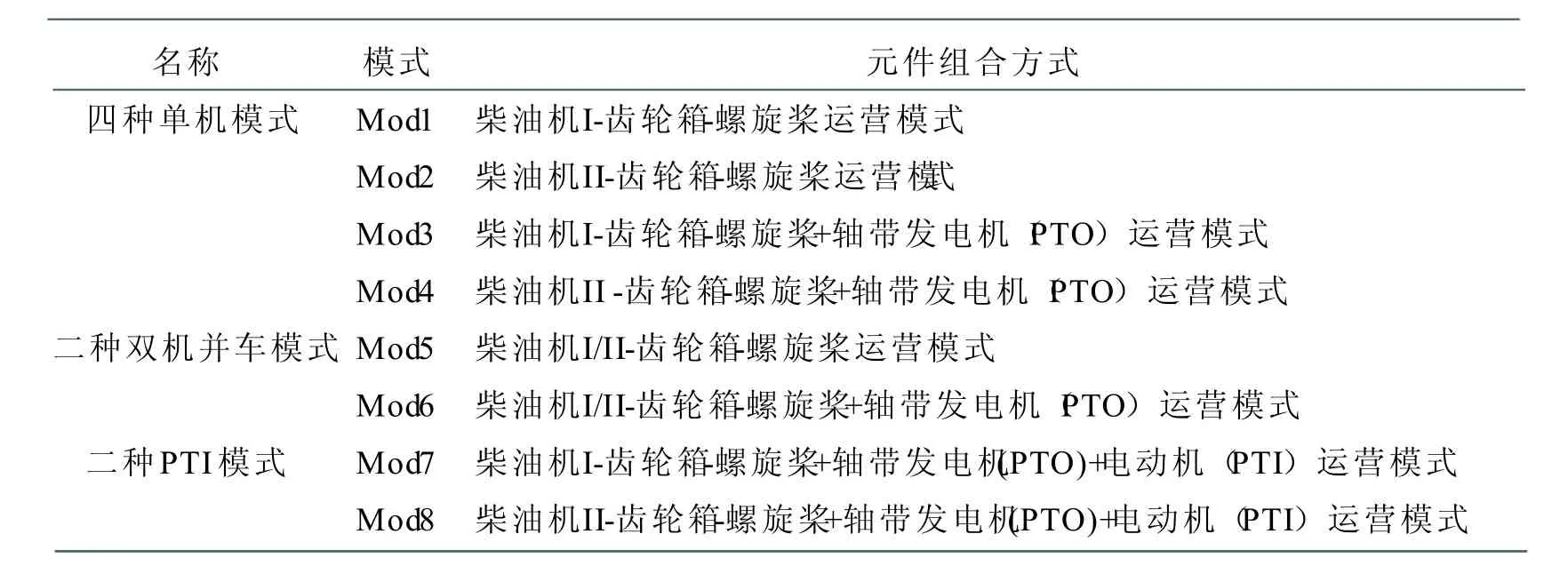
表1 四機雙槳+PTO/PTI復雜混合動力推進系統工作模式

表2 柴油機I-齒輪箱-螺旋槳+軸帶發電機(PTO)+電動機(PTI)自由振動計算結果

表2 柴油機I-齒輪箱-螺旋槳+軸帶發電機(PTO)+電動機(PTI)自由振動計算結果
在軸系校中過程中,不合理的軸系校中將會使軸系各支撐軸承的負荷受力不均,將會引起機體振動和軸承異常磨損,更嚴重將會導致軸折斷等事故。對于帶齒輪箱傳動軸系,軸系校中一般將軸系簡化為多個彈性或者剛性支撐的連續梁[9],從螺旋槳端簡化之傳動齒輪箱軸。
通過上述分析分析,可以得到用于回旋振動和軸系校中推進系統數學模型,如圖5所示的某船舶四機雙槳+PTO/PTI復雜混合動力推進系統模型。
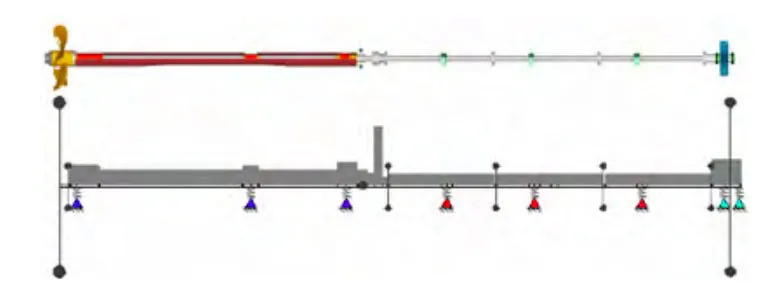
圖5 某船舶四機雙槳+PTO/PTI復雜混合動力推進系統模型
3 復雜混合動力推進軸系振動計算與分析
3.1 扭轉振動計算與分析
根據扭轉振動基本理論,采用系統矩陣法建立軸系扭轉振動一般方程:

式中:[J]為轉動慣量矩陣;[C]為阻尼矩陣;[K]為剛度矩陣;和{φ}分別為扭轉角加速度、角速度和角位移; {T(t)} 為激勵力矩。
PTI模式Mod7柴油機I-齒輪箱-螺旋槳+軸帶發電機(PTO)+電動機(PTI)運營模式下,自由振動計算結果如表2所示而強迫振動計算結果如圖6和圖7所示。
圖6 第 13號 質量點(彈 性聯軸器)功率損失曲線
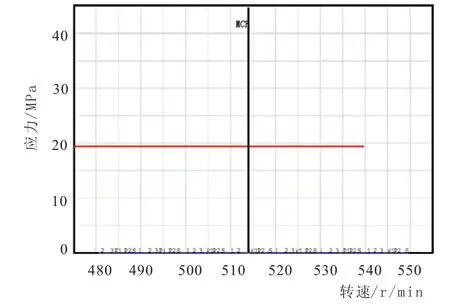
圖7 第 2號 質量點(螺 旋槳軸)應力曲線
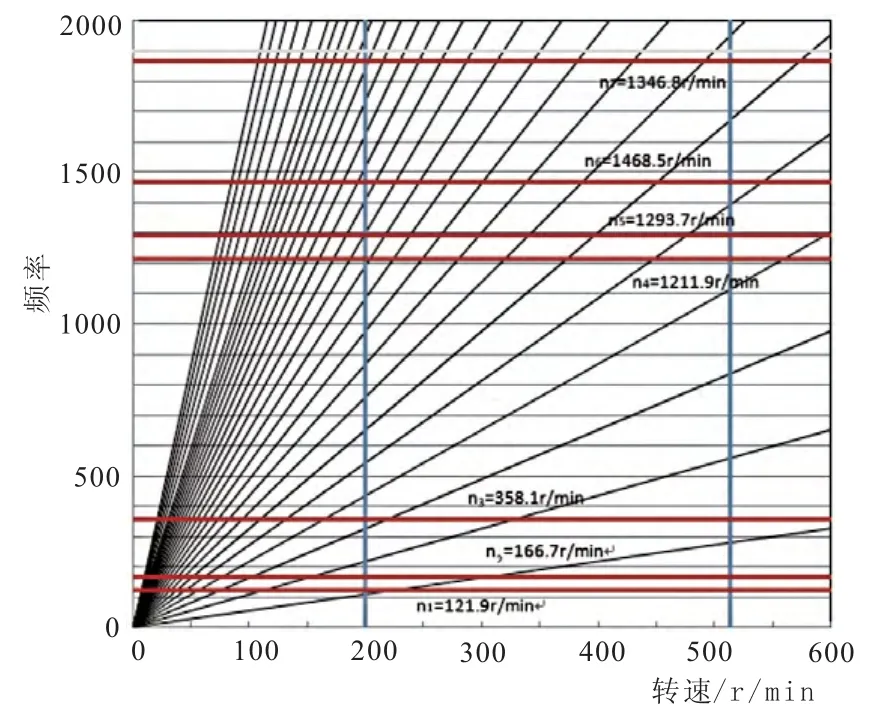
圖9 單 機模式 M od3工況的自由振動值
單機模式 Mod3柴油機 I-齒輪箱-螺旋槳+軸帶發電機(PTO)運營模式和雙機雙槳模式Mod6柴油機 I/II-齒輪箱-螺旋槳+軸帶發電機(PTO)運營模式下,其自由振動計算結果如圖9所示的雙機雙槳模式Mod6工況的自由振動計算值;而單機模式Mod3工況強迫振動計算結果如圖11和圖13所示,雙機雙槳模式Mod6工況強迫振動計算結果如圖11-圖16所示。
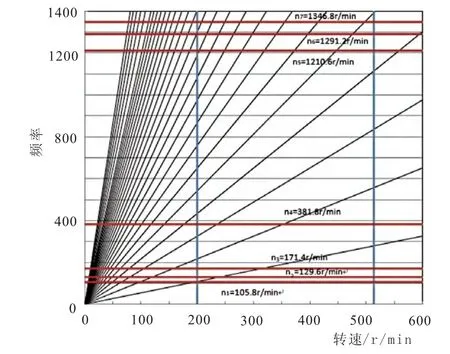
圖10 雙機雙槳模式 M od6工況的自由振動值
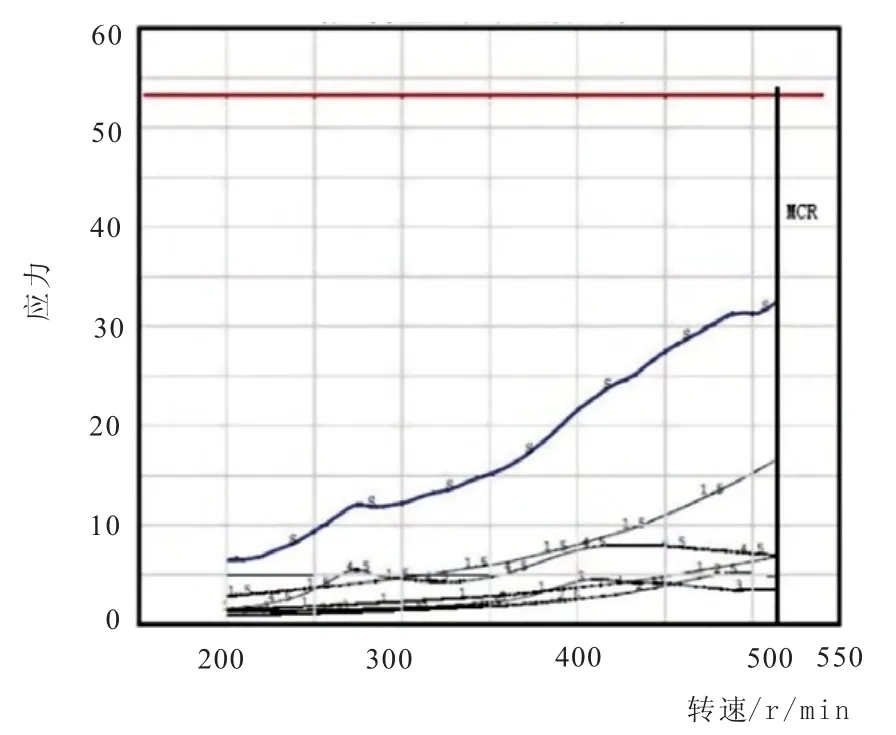
圖11 第 8號 質量點(曲 軸)應力曲線
通過采用系統矩陣法對復雜軸系混合動力推進系統扭轉振動進行計算可知:PTI模式Mod7電力推進軸系在工作轉速范圍內,系統振動振幅遠小于許用值;單機模式Mod3和雙機雙槳模式Mod6在工作轉速范圍內,存在明顯的共振點,但是未超過許用值,滿足規范要求。
3.2 回旋振動及校中計算與分析
在軸系校中計算過程中,目前傳統校中計算方法主要有有限元法、傳遞矩陣法和三彎矩方程法,其理論基礎均是經典力學方法。復雜混合動力推進系統比傳統軸系更為復雜,在軸系校中計算更加完善且更加符合實際工程,提出采用改進三彎矩法進行復雜混合動力推進系統軸系校中[9],其軸系校中結果如圖1所示。
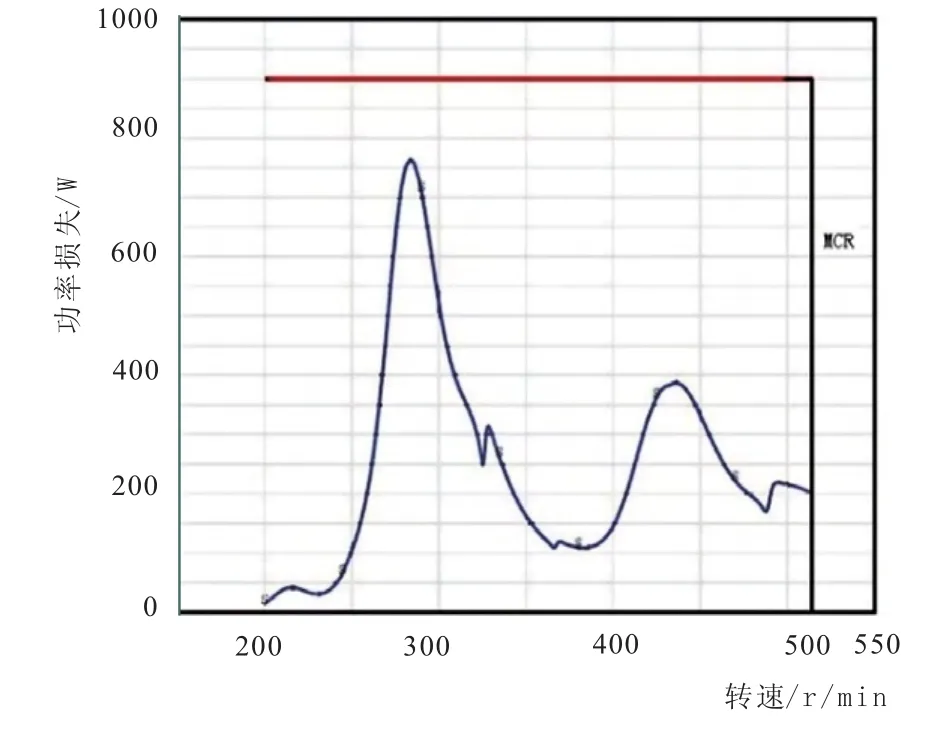
圖12 第 1 6號 質量點(彈 性聯軸器)功率損失曲線
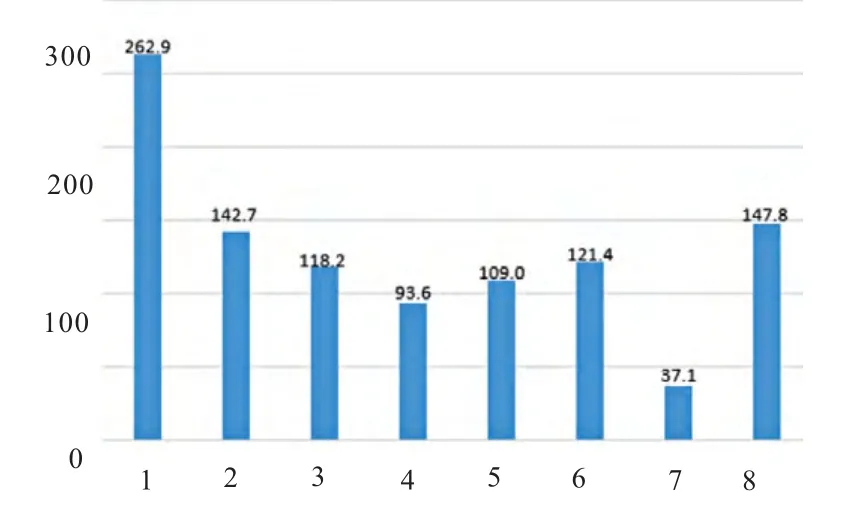
圖13 直 線狀態下軸承各負荷值(單 位kN)
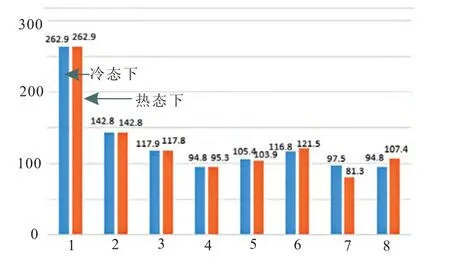
圖14 冷態狀態和熱態下軸承各負荷值(單 位kN)
根據圖17直線狀態下軸承各負荷值齒輪箱后艉軸承8和前艉軸承7的負荷之差110.7kN,很顯然不滿足規范要求。調整齒輪箱后艉軸承和前艉軸承變位為2.0 mm和2.71 mm,可以得到冷態各軸承負荷如圖18所示,各軸承負荷均滿足規范要求,齒輪箱后艉軸承和前艉軸承負荷只差僅2.7 kN;在熱態下考慮齒輪箱熱膨脹0.25 mm后,各軸承負荷均也滿足規范要求,如圖18所示。
在軸系回旋振動計算過程中,傳統Myklestal-Prohl傳遞矩陣法具有表達式簡單、易于編程求解等,適用于解決簡單的傳統推進軸系。由于復雜混合動力推進系統具有軸系較長、支撐軸承較多等特點,若采用Myklestal-Prohl傳遞矩陣法可能產生數值不穩定現象,因此為提高復雜軸系回旋振動計算精度,本文采用Riccati傳遞矩陣法進行求解。該復雜船舶混合動力推進軸系回旋振動計算結果如表3所示。
由于混合動力推進軸系工況較多,頻率范圍較寬;在進行回旋振動計算過程中,在PTI模式Mod7工況下軸系產生共振點。共振點的產生除軸系工況較多外,由于混合動力推進軸系系統往往被用于一些大型化船舶中出現,船體尾部的剛度將有所降低,軸系有產生共振的可能性。為了提高船舶的推進效率,混合動力推進軸系往往采用多槳推進軸系;則軸系必然有一部分將遠離船體伸入水中采用舷外托架支撐,其剛度一般要比船體內的支撐剛度低,軸系有產生共振的可能性。
4 結論
1)船舶復雜混合動力推進軸系在進行扭轉振動過程中,其計算工況較多且扭振數學模型較復雜;同時扭振激勵復雜需綜合考慮才能使扭轉振動計算更為精確。2)在復雜混合動力推進軸系設計階段,軸承布置不僅需要滿足軸系合理校中;同時由于混合動力推進軸系工況較多,頻率范圍較寬,可能很難避免回旋振動共振點的產生,因此設計階段需盡可能使回旋振動共振點較少且落在不常運行的工況。
[1]周瑞平,肖能齊,趙同賓,林晞晨.混合動力推進系統低噪聲軸系設計研究進展[J].武漢理工大學學報(交通科學與工程版),2014,38(3):488-491.
[2]V?lker T.Hybrid propulsion concepts on ships[J].Zeszyty Naukowe Akademii Morskiej w Gdyni,2013.
[3]Simon Sortland.Hybrid propulsion system for anchor handling tug supply vessels[J].W?RTSIL? TECHNICAL JOURNAL,2008,(01):45-48.
[4]王磊.船舶復雜推進軸系扭振機理及計算軟件研究[D].武漢理工大學,2011.
[5]W.J.HSUEH.On the vibration analysis of multi-branch torsional system[J].Journal of Sound and Vibration,2007,232(2):209-220.
[6]肖能齊,周瑞平,林晞晨.冰區航行船舶電力推進軸系機電耦合的扭振分析[J].船舶工程,2015,37(4).
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年8期)2022-06-05 07:36:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40