船舶發電機組的勵磁系統模糊PID控制研究
2015-01-04 06:23:34歐陽松
船電技術 2015年5期
歐陽松,汪 敏
(武漢船用電力推進裝置研究所,武漢 430064)
0 引言
隨著柴油機技術的更新與進步,柴油發電機組已成為現代船舶電站的主要電力來源。隨著船舶噸位的不斷增大以及船舶大功率負載的不斷增多,對船舶電網的穩定性和電能質量的要求也逐漸提高。
為了使船舶柴油發電機組輸出諧波更小、端電壓更穩定的三相交流電,需要對轉速和勵磁進行閉環控制[1]。最常見的做法是采用經典PID控制器,但經典PID算法需要被控對象的精確模型,且性能不夠理想[2]。因此,國內外學者提出了新的控制方式來取代經典PID控制方式,智能控制是一門快速發展的技術[3]。智能控制中的模糊控制不需要控制對象的數學模型,針對模糊控制算法,國內外學者做了很多研究,在具有非線性、強耦合的系統控制方面表現出了優良的性能[4]。文獻[5]中將模糊控制算法應用于控制器的設計中,在設計過程中不需要被控對象的精確數學模型,避免了經典PID對于非線性系統的局限性。文獻[6]中在控制系統中針,對系統中多變量的問題,設計了兩個模糊控制器,進一步提高了控制器的性能。因此,本文結合模糊控制和經典 PID控制,設計同步發電機勵磁系統的模糊PID控制器,該控制器由糊控制器和PID控制器并聯而成,模糊推理機的輸入為船舶發電機端電壓的偏差及其變化率經模糊化處理后的模糊量。
1 模糊控制模型
在實際系統中,我們無法建立所有系統的精確模型。模糊控制不需要被控對象的精確模型,是對專家知識和人的手動控制策略進行總結和分析,然后來模擬人的思維、決策,將其經驗轉化為模糊控制的規則從而對系統進行相應的控制。模糊控制不需要獲取精確模型、結構簡單的優點,具有一定的智能性,適合于非線性、強耦合的控制系統[7]。
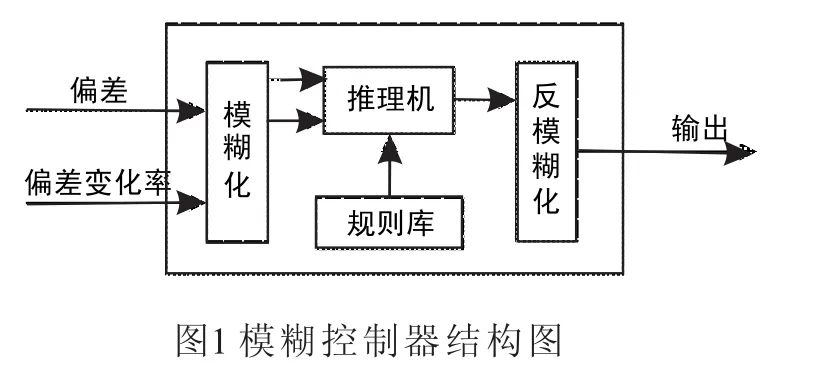
模糊控制器通常由模糊化、規則庫、推理機和反模糊化構成。模糊化是控制量輸入接口,將輸入的精確值轉換為推理機輸入的模糊值;規則庫存放被控對象的全部控制規則,在推理時為推理機提供控制規則;推理機有匹配和推理兩個基本任務,通過輸入量對應的模糊值來確定激活對應的規則,然后結合模糊規則計算得出控制器的輸出量的模糊值;反模糊化是將推理機輸出的模糊語言值轉化為被控對象所需要的清晰數字量。模糊控制器的結構圖如圖1所示。
2 模糊PID控制器的設計
模糊PID控制器的設計可分為以下步驟:
1)確定輸入和輸出變量
同步發電機的勵磁控制系統的作用是保證發電機端電壓的穩定,因此,模糊控制器的輸入變量為同步發電機的端電壓的偏差值e及其變化率ec,將控制器的輸出變量uf作為勵磁機構的輸入量。
2)模糊化處理
將發電機的勵磁系統的模糊PID控制器的輸入和輸出量的語言變量分別取值為:
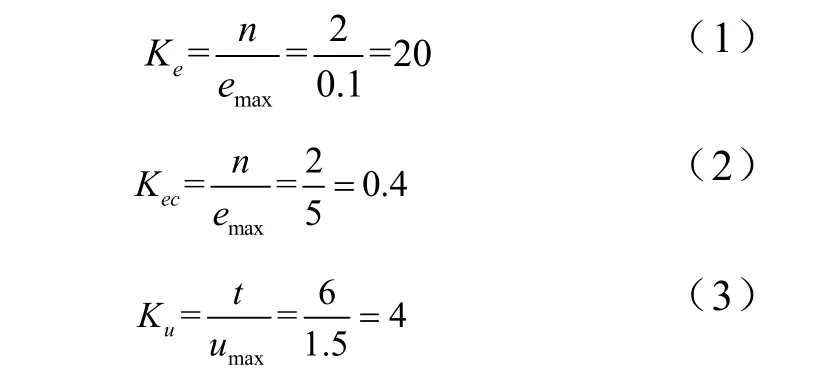
由于仿真中采用標幺模型,所得到的發電機穩定運行時的端電壓為 1,通常要求端電壓的變化在10%的范圍內,因此,輸入變量e的基本論域為[-0.1,0.1],ec的基本論域為[-5,5],輸出變量uf的基本論域為[0,1.5]。
取輸入變量e和ec的模糊論域為:
取輸出變量uf的模糊論域為:

由此可知,量化因子分別為:
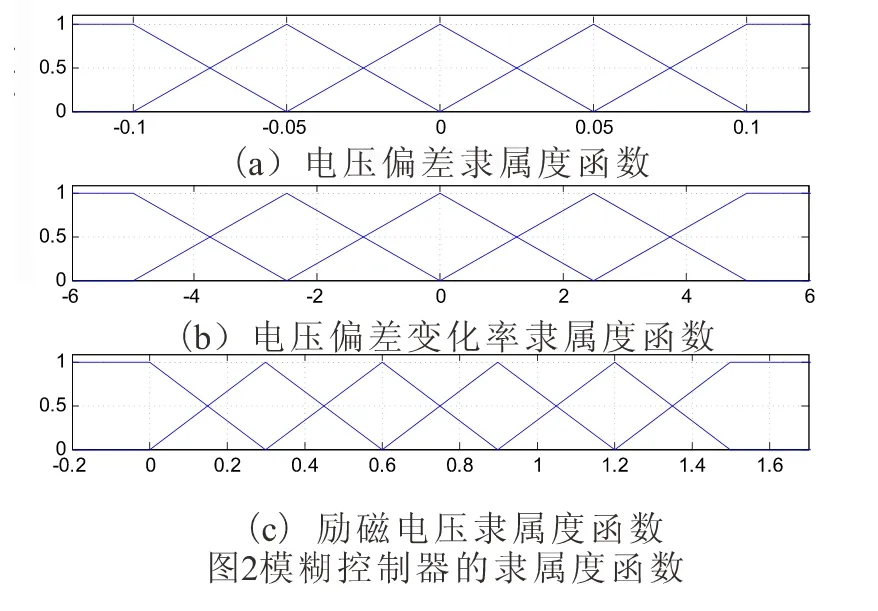
根據以上分析,采用三角隸屬度函數規則,設計輸入、輸出隸屬度函數如圖2所示。
3)模糊規則的設計
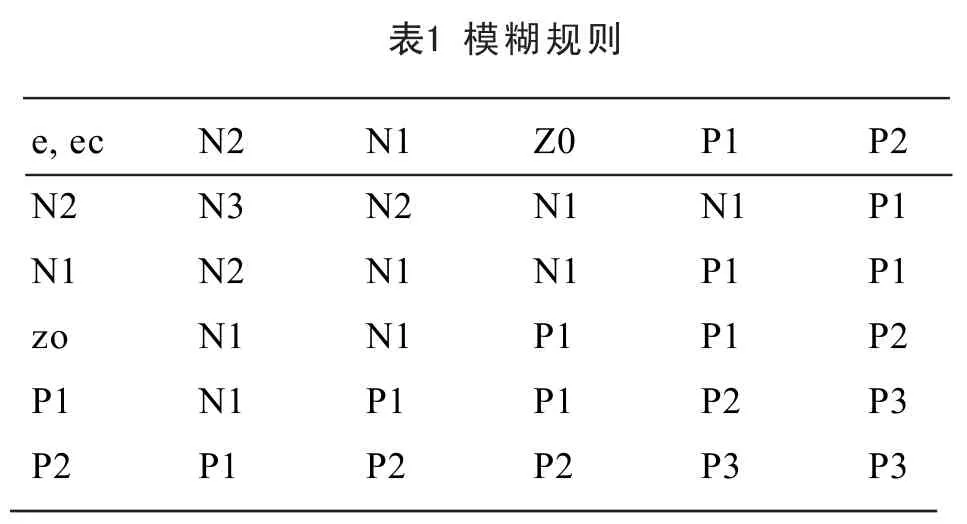
模糊規則的好壞決定著控制器的性能,將端電壓的偏差和偏差的變化率經過模糊化后的模糊值作為推理機的輸入,設計模糊規則表[8]。當偏差和偏差變化率為正且值很大時,應使其輸出值為最大值;當偏差很小但是偏差的變化率很大時,且由于混合型模糊PID控制器的積分作用較小,因此需要將其輸出值減小,以保證端電壓的穩定;當偏差為正,但偏差的變化率為負時,可將模糊控制器的輸出設為零,根據以上要求設計模糊規則,如表1所示。
本文采用Mamdani模糊推理,在模糊推理運算中,與運算采用極小法,或運算采用極大法,結論合成采用累加法,輸出解模糊采用面積重心法。基于Matlab的模糊邏輯工具箱建立相應的隸屬函數和模糊規則,生成的輸出量曲面如圖3所示。
?

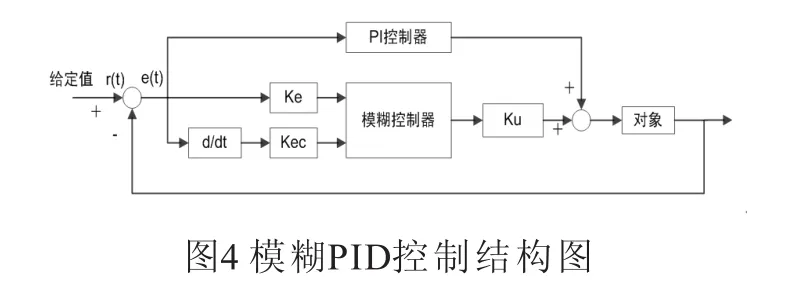
在復雜的非線性系統中,常采用模糊控制算法來進行控制,但模糊控制器的精度較差,穩定運行時其結果仍具有靜差的缺點,因此常將模糊控制和經典PID控制算法結合起來使用構成模糊PID控制器,這樣能結合兩者的優點,在偏差較大時模糊控制器起主要作用,從而使得PID控制器的積分飽和減弱,在偏差較小的時候主要由經典PID控制器起作用,最終實現系統的無靜差調節,獲得較好的調節性能。模糊PID的結構如圖4所示。
3 模糊PID控制器仿真模型
由于電機的仿真需要從穩定狀態開始運行才能保證其結果不失真,因此在運行仿真前需要對電機進行初始化。因為電機的穩態值與參考值之間存在一定的偏差,仿真啟動時需要克服這種差異則需要一定的時間,因此仿真會出現振蕩。Matlab中為了克服這個問題提供了有效的方法,在仿真模型中加入 Power GUI,利用其“潮流計算”和“電機初始化”窗口進行設置。在柴油發電機組仿真模型中含有類剛性系統,所以一般采用ode15s算法。在同步發電機開路時,沒有端電流則仿真不能通過,因此需要在電機上加一個很小的負載,其值接近于零,保證其由負載電流很小且近似于空載。
在Matlab環境下建立模糊PID控制器的仿真模型,如圖5所示。
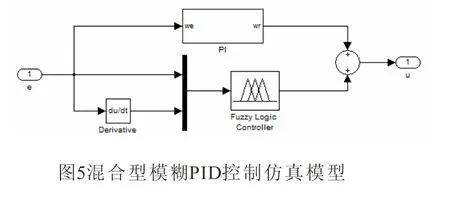
在 Matlab環境下調用模糊控制工具箱中的模糊控制模塊設計模糊PID控制器。首先調出模糊控制器并對輸入和輸出隸屬度函數進行設計,設計模糊規則,至此已經完成了船舶柴油發電機組的模糊PID控制器。
船舶柴油發電機的仿真模型如圖5所示,主要由柴油機、調速系統、轉速檢測、勵磁系統、同步電機組成。
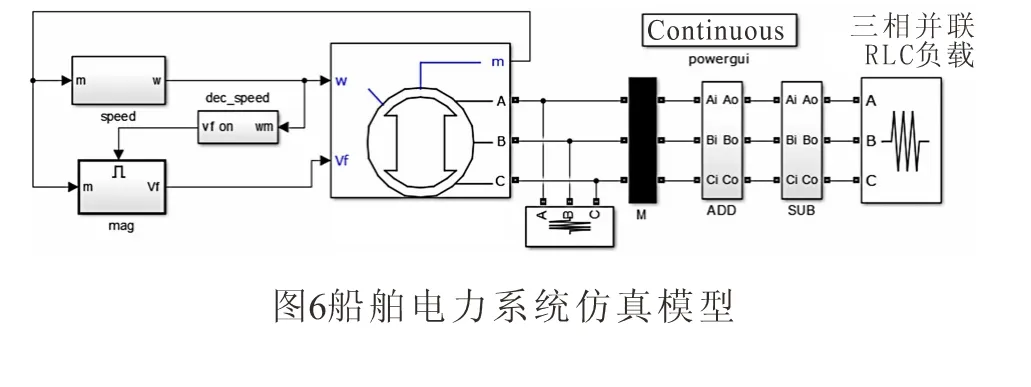
圖6中speed為柴油機及調速模塊;dec_speed為測速模塊,其功能是檢測柴油機的速度是否達到額定值,以此來判斷是否給同步發電機施加勵磁電壓;mag為采用模糊PID控制器的勵磁系統;ADD為自動加載模塊;SUB為自動卸載模塊。
4 模糊PID控制的系統仿真分析
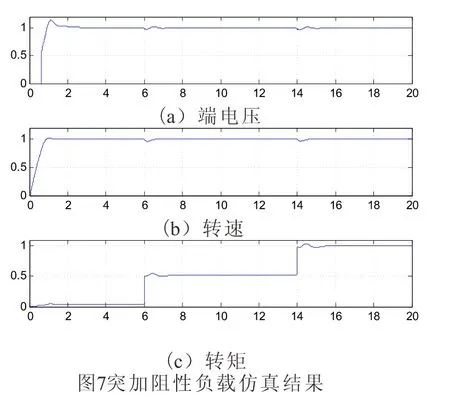
針對船舶電力系統的多種典型負載,進行了系統的突加、突減負載以及帶載起動仿真。在發電機穩定運行后,在6 s時自動閉合斷路器,給發電機突加 50%的負載。穩定運行后,在 14 s時再突加50%的負載純阻性負載,最終發電機帶額定負載穩定運行。仿真結果如圖7所示。
由圖7仿真結果分析可知,柴油機在起動、加載時,其轉速超調都非常小,其值小于 2%,且其調節時間為0.8 s,滿足《鋼質海船入級規范》(以下簡稱《規范》)要求;在同步發電機起動時滿足《規范》的要求;在整個加載的過程中,發電機組的端電壓的超調量和調節時間都滿足要求;勵磁裝置具有轉速檢測功能,當轉速接近同步轉速(在0.5 s)時刻,給發電機施加勵磁電壓,建立發電所需要的磁場。在突加負載后,發電機的電磁轉矩在兩次加載時其超調量都比較大,其調節時間也較短。從其輸出端電壓的性能來說,在加載時其超調量和調節時間都能滿足要求,在起動時的超調量為12%且調節時間為1.4 s,也滿足《規范》中的性能指標要求。勵磁控制系統中采用模糊PID控制比文獻[1]中采用經典PID控制的發電機組的端電壓的性能較好,也滿足《規范》中的性能指標要求。
5 結束語
本文結合模糊控制和經典PID控制的優點,設計了發電機勵磁系統的模糊PID控制器。將發電機端電壓的偏差及變化率作為模糊控制器的輸入,并將模糊控制器和PID控制器進行并聯構成同步發電機勵磁系統的模糊PID控制器。使發電其端電壓的超調量為12%,但其調節時間為1.4 s,機的端電壓更加穩定,具有較好的靜態、動態性能。通過仿真分析驗證了該控制方法有效可行,能夠解決復雜控制系統中的非線性問題,使船舶發電機組的性能指標滿足《規范》的要求。
[1]見可可.船舶電力系統的建模與模糊控制研究[D].武漢: 武漢理工大學,2012.
[2]劉成.船舶柴油機主機實時仿真系統的建模與轉速控制[D].上海: 上海海事大學,2004.
[3]孫增圻等.智能控制理論與技術[M].北京: 清華大學出版社,2011.
[4]Chedid R.B.,Karaki S.H.,El-Chamali C.Adaptive fuzzy control for wind-diesel weak power systems[J].IEEE Transactions On Energy Conversion,2010,25(1):71-78.
[5]劉雨.船舶柴油發電機組的建模與智能控制的仿真研究[D].大連: 大連海事大學,2002.
[6]Samir Nejim.Rudder roll damping system for ships using fuzzy logic control [J].The 2009 IEEE International Conference on Fuzzy Systems,2009,24(1):1137-1141.
[7]Zhang Yufeng,Li Shengjin,Lu Gang,et al.A fuzzy self-tuning PID control system of adjustable speed diesel generator[C].2012 International Conference on Systems and Informatics(ICSAI2012),2012:619-622.
[8]Wei He,Min Ren,Yingqi Tan.A fuzzy control system of diesel generator speed[C].Asia-Pacific Power and Energy Engineering Conference,2009: 1-4.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
船舶(2021年4期)2021-09-07 17:32:22
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
Coco薇(2017年11期)2018-01-03 20:59:57
大電機技術(2017年3期)2017-06-05 09:36:02
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
軍事文摘(2016年16期)2016-09-13 06:15:49
電力工程技術(2014年1期)2014-03-20 14:19:06