基于粒子濾波的制導信息提取算法研究
2015-01-04 08:51:20劉凱梁曉庚李友年
電子設計工程 2015年12期
劉凱,梁曉庚,李友年
(中國空空導彈院 河南 洛陽 471000)
精確制導是現(xiàn)代武器系統(tǒng)的關鍵技術之一。精確制導系統(tǒng)研究包括目標探測、制導信息處理、精確定位和導航、制導算法設計和先進飛行控制系統(tǒng)設計等。在空空導彈的末制導中,由于導引頭輸出的可測制導信息非常有限,精確制導實現(xiàn)面臨的信息缺乏問題尤為突出[1-2]。因此,如何精確的提取出關鍵的制導信息成為精確制導面臨的一個核心問題。
制導信息估計是根據導引頭的探測信息以及彈體的導航信息來解算彈目相對運動狀態(tài),比如彈目相對距離、相對速度、視線角以及視線角速率等。制導信息估計遇到的主要問題是:彈目相對運動學是嚴重非線性的、制導回路與所采用的制導律有關、目標探測信息不足導致估計模型可觀性差。由于這些問題,解決制導信息估計精度問題一直受到廣泛的重視。目前常用的制導信息提取算法主要有擴展卡爾曼濾波、跟蹤濾波等[3]。
本文中,針對制導信息估計遇到的主要問題,提出了采用粒子濾波算法進行制導濾波,提取所需要的制導信息。粒子濾波是一種基于隨機采樣的濾波方法,主要解決非線性非高斯問題。粒子濾波的實質是遞推Bayes濾波的一種實現(xiàn)形式,粒子濾波算法擺脫了解決非線性濾波問題時隨機量必須滿足高斯分布的制約條件,適用于非高斯非線性條件。
1 制導信息
制導信息提取是指依賴目標探測信息和彈體自身的導航信息來計算彈目相對運動狀態(tài),如彈目相對距離、相對速度、目標的加速度等。
考慮平面攔截情況,彈目相對運動關系如圖1所示,可得彈目相對運動關系可得[4]

其中R為目標位置,R˙為相對速度,q為彈目視線角,q˙為視線角速度,vm為導彈速度、θm為彈道傾角,vt為目標速度、θt為目標速度傾角。
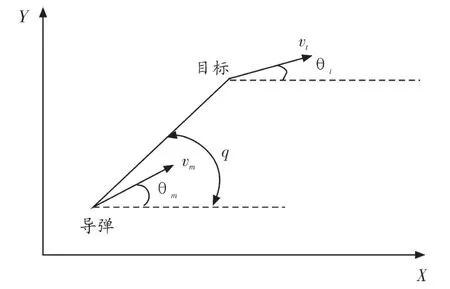
圖1 平面攔截運動學關系Fig.1 Planar interception kinematics relations
傳統(tǒng)的比例導引律只需要導引頭輸出視線角速率即可,而隨著對制導精度要求的提高,出現(xiàn)了滑模變結構制導律、最優(yōu)制導律等等,這些制導律不僅需要實現(xiàn)角速率信息,還需要彈目相對位置、相對速度以及目標加速度等信息,固需制導濾波算法得到彈目相對運動關系,進而求解得到視線角以及視線角速率信息。
2 粒子濾波
粒子濾波是一種基于隨機采樣的濾波方法,主要解決非線性非高斯問題[6]。粒子濾波實質是遞推Bayes濾波的一種實現(xiàn)形式,在每一時刻,利用狀態(tài)空間中一系列隨機樣本集(粒子)來近似系統(tǒng)狀態(tài)的后驗概率密度函數,從而得到下一時刻的狀態(tài)估計。其主要思想是利用這些采樣點和權值來獲得最小方差的狀態(tài)估計量,是一種基于仿真的統(tǒng)計濾波方法[7]。
2.1 序貫重要性采樣(SIS)
從待估計的后驗分布p(x0:k|y0:k)中抽樣出N個獨立同分布的粒子;i=1…N},則分布 p(x|y)的估計表示為0:k0:k

其中δ(·)為狄拉克函數。
當無法從后驗分布p(x0:k|y0:k)中直接采樣時,可以找一個容易采樣的密度分布函數(重要性函數)q(x0:k|y0:k)中采樣。則后驗概率分布可以表示為

其中w(x0:k)為重要性權值,為歸一化權值。
2.2 粒子濾波算法
由于在SIS算法中,離散隨機量存在嚴重的退化問題。也就是在進行一定的迭代之后,除了很少的粒子以外,其他粒子所對應的權值都可以忽略不計。
減小退化現(xiàn)象的一個最有效的方法就是增大粒子數N,但N過大會給計算帶來很大的負擔,影響粒子濾波器的運行速度。所以考慮采用另外兩種辦法:1)優(yōu)選重要性函數法;2)重采樣法。
最優(yōu)重要性函數為p(xk|xk-1,yk)。然而從最優(yōu)函數中采樣比較困難,一般不易求解。實際應用中更常用的是先驗重要性函數:

此時重要性權值的計算公式可以簡化為

由于p(xk|xk-1)沒有考慮觀測信息 yk,所以采樣得到的粒子并不能非常準確地描述后驗分布。這種選取方案的優(yōu)點在于根據狀態(tài)方程,重要性函數的采樣很容易實現(xiàn),而且重要性權值也能直接由觀測方程迭代計算得到。
3 制導濾波器設計
3.1 制導濾波器狀態(tài)方程
導彈需要跟蹤大機動目標,因此選擇機動目標Singer模型對目標進行跟蹤估計。該模型實質是零均值一階時間相關模型[5],即:

其中α為機動頻率,等于機動時間常數倒數,ω(t)是均值為零,方差為的白噪聲,為目標加速度方差。
根據選取的目標機動模型,選取狀態(tài)變量為x=[rx,ry,vx,vy,atx,aty]T,在直角坐標系下建立濾波狀態(tài)方程:
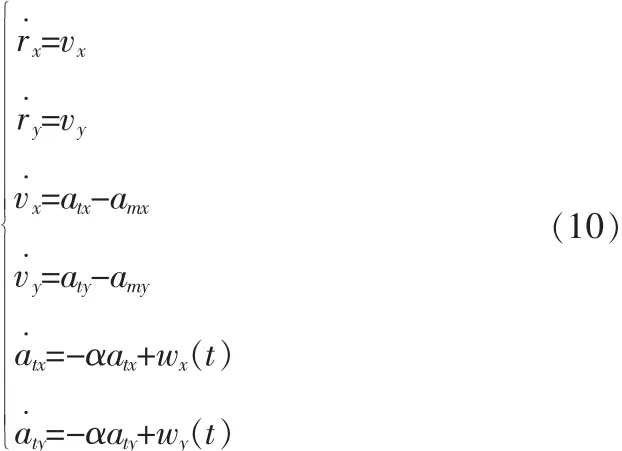
其中:rx,ry彈目相對距離向量在直角坐標系中的分量;vx,vy彈目相對速度向量在直角坐標系中的分量;atx,aty為目標加速度向量在直角坐標系中的分量,amx,amy為導彈加速度;wx,wy為系統(tǒng)的過程噪聲[8]。
3.2 目標跟蹤量測方程
目標的量測信息包含實現(xiàn)的方位角、俯仰角和彈目視線等信號,選擇觀測向量為

其中R為彈目距離,θ為目標量測的方位角。并由此建立目標運動的量測方程


3.3 粒子濾波算法
粒子濾波算法的基本步驟如下[6]:
1)初始化:當k=0時,確認目標狀態(tài)的先驗概率密度函數p(x0)的表示形式,提取 N 個樣本點{,i=1,…,N},并給每個粒子賦初始權重為
2)狀態(tài)預測,即重要性采樣、權重計算:當時刻k=1時,從轉移先驗密度函數通過公式為似然密度函數);


4 仿真分析
為了驗證粒子濾波對于制導濾波算法的有效性,建立以下仿真模型[9],仿真參數如下:目標機動情況如下:目標的初始位置在(2 000 m,6 000 m),初始速度為(-400 m/s,0 m/s),采樣間隔T=0.01 s,仿真結束時間設為stop_t=20 s,粒子濾波算法的采樣粒子數N=200。
仿真過程中采用改進的導引律設計,設擴展比例導引律為:

其中R˙為彈目相對速度,q˙為實現(xiàn)角速率,aT為目標加速度,g為重力補償項。

圖2 彈目運動關系Fig.2 Relationship between the missile and the target

圖3 彈目相對位置及估值Fig.3 Relative position and estimation between the missile and the target

圖4 彈目相對速度及估值Fig.4 Relative velocity and estimation between the missile and the target

圖5 彈目視線角及估值Fig.5 Line-of-sight angel and estimation between the missile and the target
在仿真過程中,將彈體自動駕駛儀部分的傳遞函數近似1,進行仿真可得,仿真時間為 2.19 s,脫靶量為3.28 m,具有較高的制導精度,圖1為彈目的相對運動,圖2到圖4分別給出了彈目相對位置、彈目相對速度、視線角和視線角速率的真實值和濾波估計值,結果表明粒子濾波對于非線性濾波具有較高的精度,驗證了粒子濾波算法在制導信息提取中的有效性。

圖6 彈目視線角速率及估值Fig.6 Line-of-sight angel velocity and estimation between the missile and the target
5 結束語
本文提出了采用粒子濾波進行制導信息估計,并建立仿真模型進行驗證。仿真結果表明采用粒子濾波算法能夠有效的估計出彈目之間的相對運動,從而提取出有效的制導信息,但是由于粒子濾波存在計算量大大、耗時長等問題,所以進一步的粒子濾波算法還有待研究。
[1]劉興堂.導彈制導控制系統(tǒng)分析、設計與仿真[M].西安:西北工業(yè)大學出版社,2006.
[2]LEFASC C.Using roll-angle measurements to track aircraft maneuvers[J].IEEE Transactions on Aerospace and Electronic Systems,1984,20(6):672-681.
[3]Durbha V,Balakrishnan S N.Target Interception with Cost-Based Observer[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.21 -24 August 2006,Keystone,Colorado.AIAA 2006-6218.
[4]Paul Zarchan,Tactical and Strategic Missile Guidance[M].American Institute of Aeronautics and Astronautics,2012.
[5]周宏仁,敬忠良,王培德.機動目標跟蹤[M].北京:國防工業(yè)出版社,1991.
[6]胡士強,敬忠良.粒子濾波原理及應用[M].北京:科學出版社,2010.
[7]周云端,何志勇,趙瑞國.基于遺傳算法的加速度控制PID參數自整定研究[J].火箭推進,2012(4):68-71.ZHOU Yun-duan,HE Zhi-yong,ZHAO Rui-guo.Study on genetic algorithm based auto-tuning of acceleration control PID parameters[J].Journal of Rocket Propulsion,2012(4):68-71.
[8]李山峰,湯偉.循環(huán)預冷試驗中測量系統(tǒng)干擾問題分析與措施[J].火箭推進,2014(4):77-82.LI Shan-feng,TANG Wei.Analysis and solution for interference with measurement system in cycle precooling test[J].Journal of Rocket Propulsion,2014(4):77-82.
[9]尤裕榮,袁洪濱,王春民,等.PWM高速開關閥動態(tài)調節(jié)特性仿真研究[J].火箭推進,2012(5):24-29.YOU Yu-rong,YUAN Hong-bin,WANG Chun-min,et al.Simulation of dynamic regulating characteristics of PWM high-speed on-off valve[J].Journal of Rocket Propulsion,2012(5):24-29.
猜你喜歡
建材發(fā)展導向(2021年13期)2021-07-28 07:14:38
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:02
中國生殖健康(2020年4期)2021-01-18 02:58:26
甘肅教育(2020年21期)2020-04-13 08:09:24
中國生殖健康(2018年4期)2018-11-06 07:12:30
中華手工(2017年2期)2017-06-06 23:00:31
唐山文學(2016年11期)2016-03-20 15:26:04
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32