純電動汽車制動力分配策略的建模與仿真
2015-01-06 06:54:04姜建偉易吉良賀正蕓周述慶
新型工業(yè)化 2015年2期
姜建偉,易吉良,賀正蕓,周述慶
(湖南工業(yè)大學 電氣與信息工程學院,湖南 株洲 412007)
純電動汽車制動力分配策略的建模與仿真
姜建偉,易吉良,賀正蕓,周述慶
(湖南工業(yè)大學 電氣與信息工程學院,湖南 株洲 412007)
為了在保證車輛制動安全的同時提高能量回收效率,在分析了常用制動力分配策略基礎上,設計了一種基于模糊邏輯控制的制動力分配策略,即根據(jù)制動強度的大小采取不同的制動力分配曲線,利用Matlab/Simulink建立了制動控制仿真模型并將其嵌入到ADVISOR軟件中進行仿真分析。結果表明,本文設計的制動策略在制動能量回收效率方面優(yōu)于ADVISOR軟件自帶的制動控制策略。
電動汽車;制動力分配;模糊控制;ADVISOR
0 引言
電動汽車區(qū)別于傳統(tǒng)燃油汽車的關鍵特性之一就是具有再生制動系統(tǒng)。所謂再生制動就是當汽車在制動或減速過程中,將車輛的部分動能或勢能轉化為電能儲存在蓄電池中,當車輛再次加速或者啟動時,又將回收的能量提供給車輛行駛,實現(xiàn)了制動能量的回收利用,從而提高了能量利用效率和增加了汽車續(xù)駛里程[1-3]。
目前國內(nèi)對再生制動的研究主要集中在控制策略、回收效率、仿真模型建立和測試平臺四個方面,而其中控制策略研究中的制動力分配是一個研究熱點。參考文獻[4]提出了三種典型的制動力分配策略,并針對三種分配策略在特定道路工況下進行仿真分析。參考文獻[5]將模糊控制和理想制動力分配相結合,提出一種基于模糊邏輯控制的復合制動力分配策略,并在道路循環(huán)工況下將此分配策略與ADVISOR分配策略仿真對比,結果表明該分配方法在保證制動安全的同時可以有效提高能量回收效率。參考文獻[6]提出一種基于歐洲經(jīng)濟委員會制動法規(guī)(ECE,Economic Commission of Europe safety regulations)的前后輪制動力分配策略,根據(jù)制動強度和電機所能提供的最大再生制動力選擇合適的分配關系達到合理分配總制動力。現(xiàn)有的制動力分配策略主要根據(jù)車速、理想制動力分配曲線和ECE制動法規(guī)來進行制動力分配,這些策略都難以同時兼顧到制動安全性與能量回收效率。
本文以前輪驅動的純電動汽車的為研究對象,以提高制動能量回收效率為目標,以再生制動控制策略即制動力分配為研究內(nèi)容,綜合考慮制動穩(wěn)定性和能量回收效率,提出一種基于模糊控制的最大能量回收控制策略,并在ADVISOR軟件中進行仿真分析,仿真結果表明,本文所設計的控制策略在保證汽車制動安全和穩(wěn)定前提下,提高了制動能量的回收效率。
1 傳統(tǒng)制動力分配策略

圖1 汽車制動受力分析圖Fig. 1 forces acting on vehicle braking
車輛在制動過程中受力情況如圖1所示,圖中忽略了空氣阻力和滾動阻力矩以及旋轉質量減速時的慣性力矩。
通常在汽車制動過程中會出現(xiàn)三種情形,即:1)前、后輪同時抱死;2)前輪先于后輪抱死;3)后輪先于前輪抱死 [6,7]。
情形1)屬于穩(wěn)定工況,這種前、后輪分配曲線稱為理想制動力分配曲線,簡稱I曲線。其表達式為:

式中Fbf、Fbr分別表示為前、后輪總制動力,單位:N;a、b、L、hg分別表示車輛質心到前軸、后軸中心線的距離、車軸距、車輛重心高度,單位:m;m為汽車的質量,單位:kg。
情形2)同樣也屬于穩(wěn)定工況,但前輪先抱死會導致汽車失去轉向能力,這種前、后輪制動力分配曲線簡稱為f曲線。其表達式為

情形3)是一種不穩(wěn)定的工況,后輪提前抱死會導致車輛發(fā)生側滑危險,所以應該避免發(fā)生。這種制動力分配曲線簡稱為r曲線。其表達式為:

另外,為了確保汽車制動安全,同時保證較好的利用道路附著系數(shù),聯(lián)合國經(jīng)濟委員會制定了ECE R13制動法規(guī),規(guī)定明確要求,當制動強度在0.2~0.8之間時,制動力強度和附著系數(shù)的關系必須滿足:z ≥ 0.1+0.85(φ?0.2),并且后輪的利用附著系數(shù)曲線一定要在前輪的利用附著系數(shù)曲線之下。對于前輪汽車而言,ECE制動法規(guī)規(guī)定了最小后輪制動力范圍曲線,即M曲線。其方程表達式為:

根據(jù)公式(1)~(4),將汽車的相關參數(shù)代入上述公式中,通過matlab作圖可以得到前、后輪制動力分配曲線如圖2所示,圖中的I曲線、f曲線組、r曲線組、M曲線分別表示理想制動分配曲線、前輪先于后輪抱死曲線組、后輪先于前輪抱死曲線組、ECE制動力分配曲線。
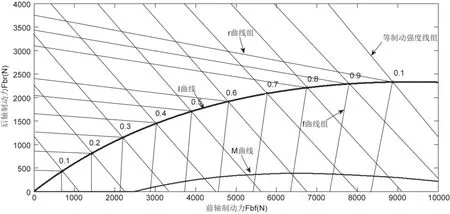
圖2 前軸制動力和后軸制動力關系圖Fig. 2 Braking forces in the front and rear wheels
根據(jù)理想制動力分配曲線進行制動力分配,車輛可以有效利用道路附著系數(shù),制動效果較好,但回收能量有限;根據(jù)ECE法規(guī)分配曲線進行分配,可以最大化地回收制動能量,但控制系統(tǒng)非常復雜難以實現(xiàn);而f曲線組是在不同的道路附著條件下前輪抱死時采取的制動力分配方法,r曲線組由于本身是種不穩(wěn)定狀態(tài),不予以考慮。總之,單一的按照某一種分配曲線去進行制動力分配,是很難同時保證制動安全和回收效率。
2 前輪最大制動力分配策略
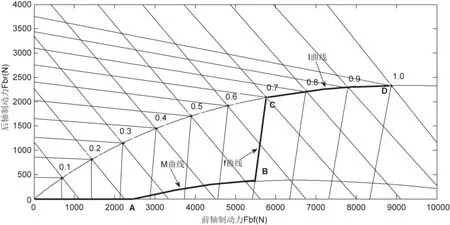
圖3 最大制動力分配曲線圖Fig. 3 maximum distribution curve of Braking forces in the front and rear wheels
為克服三種傳統(tǒng)制動力分配策略的不足,本文設計了一種前后輪制動力分配控制策略,它可以使得前輪制動力實現(xiàn)最大化。圖3-11中,曲線OABCD為本文設計的制動力分配曲線,其中A點為M曲線與橫軸的交點,B點為M曲線與f曲線的交點,C點為f曲線與I曲線的交點,根據(jù)公式(4),令Fbr=0并代入車輛的相關參數(shù)值,可得到A點坐標為(2462,0),對應A點的制動強度為0.2。B點坐標可由公式(4)和公式(2)聯(lián)立求出,從而得到B點坐標為(5613,392),對應B點的制動強度為0.53。C點是理想制動曲線上的點,它的制動強度與道路附著系數(shù)大小相等,所以C點的制動強度為0.7。總結以上分析,本文提出的制動力分配策略具體規(guī)則為:
制動強度z ≤ 0.2,車輛所需的制動力很小,可由前輪再生制動力提供制動。
制動強度0.2 < z ≤ 0.53,按照ECE制動法規(guī)要求的M曲線分配。
制動強度0.53< z ≤ 0.7,前后輪沿著道路附著系數(shù)φ為0.7的f曲線進行分配。
制動強度z > 0.7,在制動強度較大時,前、后輪制動力沿I曲線進行分配。
總之,當z ≤ 0.2情況下,采用電機再生制動,當z > 0.7情況下采用機械制動,其余情況需要進行電機再生制動和機械摩擦制動相結合的復合制動。
基于前述的制動力分配可得到最大的前輪總制動力,為了盡可能的回收制動能量,需要在前輪上合理分配電機再生制動力和機械摩擦制動力。文獻[3]給出電機最大再生制動力計算模型,其原理是通過比較前輪需求制動力和電機能提供的最大制動力來進行前輪制動力分配。該種計算方法僅僅考慮了電機發(fā)電效率、電池充電效率等部分因素,而影響提供再生制動力大小的因素很多,很難用一個解析模型來描述這種復雜的非線性關系,本文引入模糊邏輯控制器,基于人的經(jīng)驗和知識進行智能分配,實現(xiàn)前輪電機再生制動力和機械摩擦制動力的合理分配。
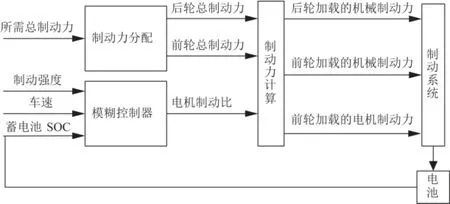
圖4 制動力分配模糊控制策略結構Fig. 4 Fuzzy braking force distribution system framework
3 模糊控制的制動力分配策略
本文設計的基于模糊控制的制動力分配控制系統(tǒng)結構如圖4所示,主要由三個模塊組成,第一個是制動力分配模塊,根據(jù)本文提出的制動力分配策略對需求的總制動力進行前、后輪制動力分配。第二個是模糊控制器模塊,為三輸入單輸出的結構,三個輸入分別為制動強度、蓄電池荷電狀態(tài)(SOC,State of charge)和汽車行駛速度,輸出為電機制動力占前輪總制動力的比例。第三個模塊為制動力計算模塊,根據(jù)所需的前輪總制動力、后輪總制動力和電機再生制動力占前輪總制動力的比例,計算出所需的電機再生制動力和分別加載在前、后輪的機械摩擦制動力。
模糊控制器首先對三個輸入量進行模糊化,即確定每個輸入量的隸屬度函數(shù),這是模糊控制器設計的基礎。常用的方法有:模糊統(tǒng)計法、例證法、專家經(jīng)驗法等,本文是通過專家經(jīng)驗法來分別給出對應變量的隸屬度函數(shù)[8]。
制動強度的隸屬度函數(shù)采用鐘型隸屬度函數(shù),如圖5-a所示,模糊子集high表示制動力需求較大,一般車輛出現(xiàn)在緊急剎車情況;模糊子集middle表示對制動力需求一般;模糊子集low表示對制動力需求很小,一般為車輛處于下坡滑行狀態(tài)。
蓄電池SOC的隸屬函數(shù)采用鐘型隸屬度函數(shù),如圖5-b所示,模糊子集high表示電池剩余電量較多,此時不需要或只需要少量充電;模糊子集middle表示電池剩余電量一般,此時車輛制動可以合理分配電機制動和機械制動;模糊子集low表示電池剩余電量較少,此時可以全部采用電機制動。
車速的隸屬度函數(shù)采用鐘型和高斯型隸屬度函數(shù),如圖5-c所示,模糊子集high表示車速比較高,如車輛在高速公路行駛;模糊子集middle表示車速一般,如城市道路工況;模糊子集low表示車速較低,如車剛啟動不久或即將停車。
輸出的電機制動比k的隸屬度函數(shù)如圖5-d所示,為提高隸屬度函數(shù)的分辨率和控制的靈敏度,模糊子集low,middle,high采用三角函數(shù),模糊子集lower,higher采用梯形函數(shù)。模糊子集lower表示輸出極小的電機制動比例,如在蓄電池SOC值很高時,為了蓄電池安全,此時不采用電機制動力;模糊子集low表示輸出較低的電機制動比例,主要靠機械摩擦制動;模糊子集middle、high表示輸出中等或較高電機制動比例,前輪電機制動力和前輪摩擦制動力按比例輸出;模糊子集higher表示輸出極大的電機制動比例,此時前輪制動基本由電機制動力來承擔。
模糊規(guī)則的制定合理關系到模糊控制器能否達到預期控制效果。本文采用如下規(guī)律制定模糊規(guī)則[9,10]:
1)蓄電池荷電狀態(tài)SOC大于0.8,不進行制動能量回收,避免對蓄電池過量充電而損壞。
2)在制動強度比較低時,采用純電機制動;當制動強度逐漸增大,采用電機制動力和機械制動相結合的方式;汽車處于緊急制動狀態(tài),全部采用機械摩擦制動來實現(xiàn)車輛制動。
3)在車速很低時,如堵車時,由于電機產(chǎn)生制動轉矩很小,此時制動以機械摩擦制動為主,而隨著車速的增加,電機再生制動力所占比例逐漸增大。
以上規(guī)律既保證了車輛制動的穩(wěn)定性和安全性,還考慮了回收更多的制動能量。根據(jù)經(jīng)驗和大量的實驗,制定了27條模糊規(guī)則,如表1所示。
模糊控制器的輸出是個模糊值,但在實際中需要的是精確值,所以應采用合理的方法進行去模糊化。本文考慮到駕駛的性能和舒適度,采用加權平均法計算出電機制動比,進而得出前輪上電機制動力和摩擦制動力的大小。
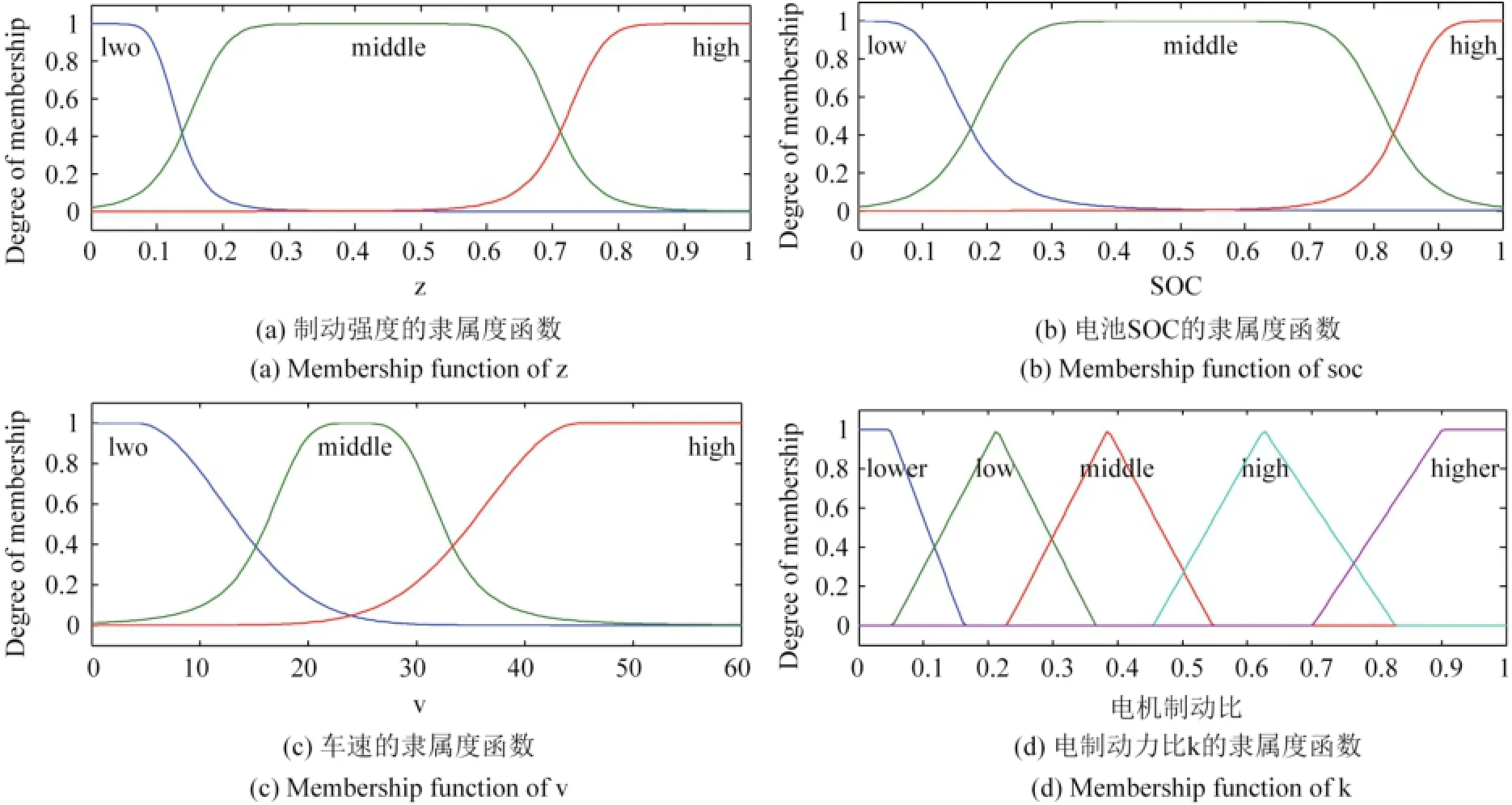
圖5 輸入量和輸出量的隸屬度函數(shù)Fig. 5 Membership function of input and output
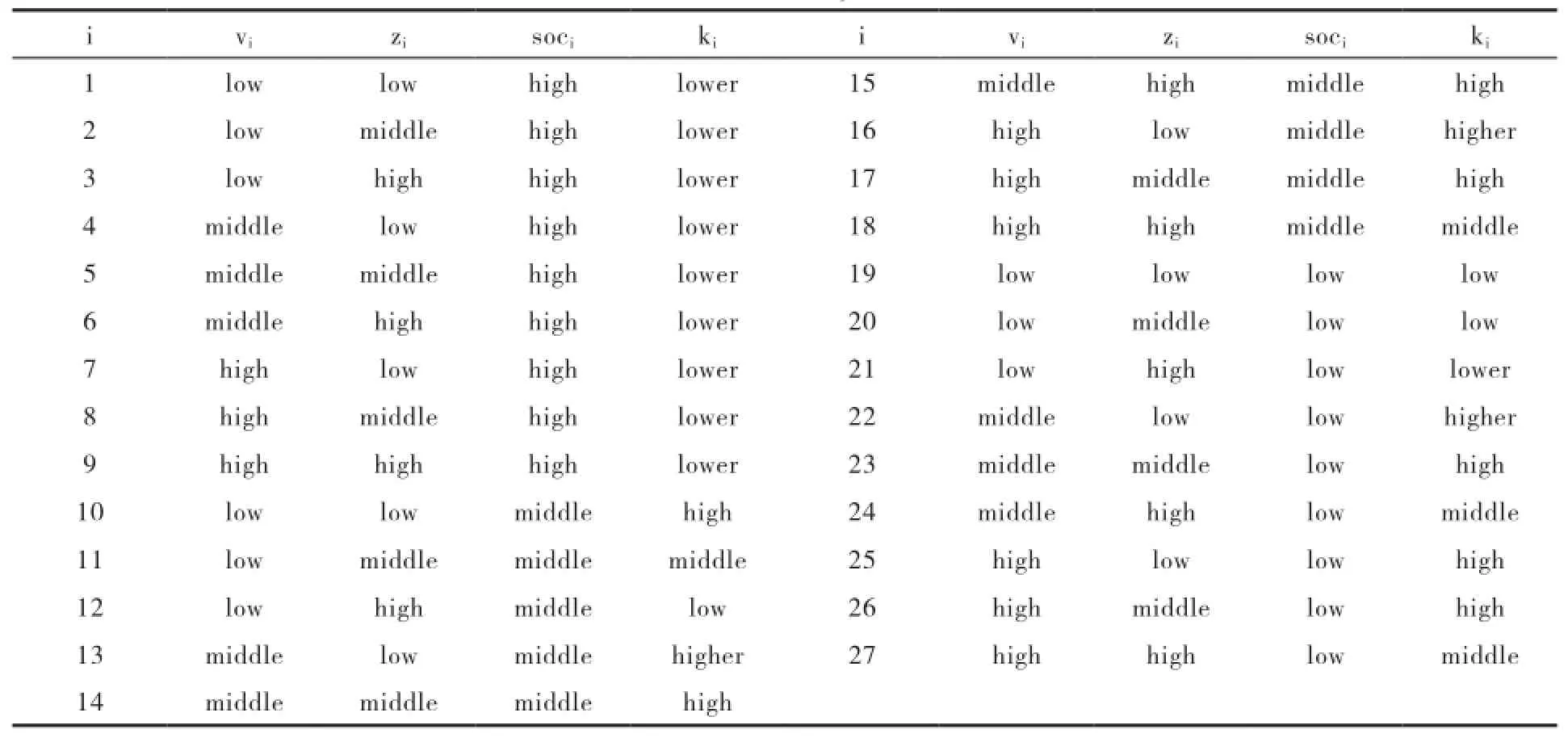
表1 模糊規(guī)則庫Table 1 Fuzzy rules
4 仿真實驗方法
為了驗證所設計控制策略的有效性,在Matlab/Simulink環(huán)境下,根據(jù)前文所設計的分配策略建立后向仿真模型,如圖6所示,并將模型嵌入到ADVISOR軟件中,選擇典型道路工況CYC-UDDS進行仿真實驗,并與ADVISOR自帶的控制策略進行對比實驗,從蓄電池荷電狀態(tài)SOC(ess_soc_hist)變化趨勢和電機可輸出轉矩(mc_trq_out_a)變化曲線兩方面對兩種策略進行性能對比[8]。
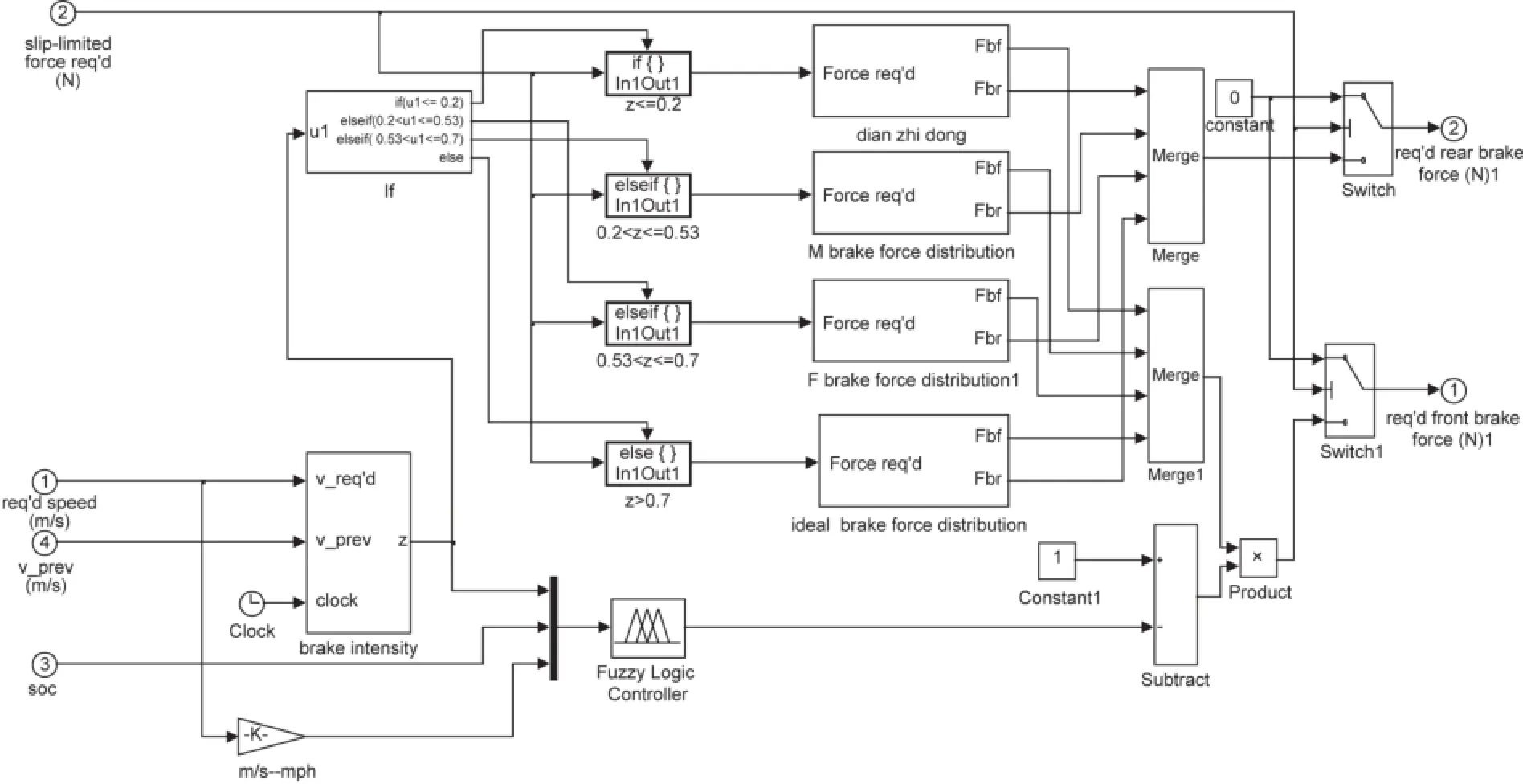
圖6 基于模糊控制的制動力分配仿真模型Fig. 6 the simulation model of braking force distribution Based on the fuzzy control
圖7為在不同制動控制策略下蓄電池SOC變化趨勢圖,顯然采用本文控制策略的蓄電池SOC值曲線會更加平穩(wěn),回收的電能更多。
圖8為不同制動分配策略下的電機可輸出轉矩變化曲線的對比,可以看出電機輸出的正轉矩是重合的,因為本文僅僅對制動策略進行了設計,所以在汽車驅動狀態(tài)下應具有相同的驅動力。當汽車處于制動狀態(tài)時,本文所設計的制動策略使電機輸出負轉矩更大,即在制動時電機制動力矩所占總制動力比例增大,增加了制動能量的回收。
為了更加直觀準確的表達制動能量回收效果,本文采用制動能量回收效率、有效制動能量回收效率和整車能量效率作為評價制動能量回收效率的三個指標。制動能量回收效率是指蓄電池回收的能量占整車制動總能量的百分比;有效制動能量回收效率是指蓄電池回收的能量占整車消耗的總能量的百分比;整車能量效率是指空氣阻力消耗的能量和滾動阻力消耗的能量之和占整車消耗總能量的比值。在仿真結果界面中點擊energy use figure按鈕,顯示出車輛不同部件在驅動狀態(tài)和再生制動狀態(tài)下的輸入能量、輸出能量、損失能量和整車能量效率參數(shù),可以分別計算出三個指標值,如表2所示。
由上表可以看出,采用本文制動控制策略的三項指標都大于ADVISOR再生制動策略下的相應指標。同樣多的制動能量,采用本文的制動策略,再生制動系統(tǒng)回收的能量更多,整車的能量效率得到提高,為提高電動汽車續(xù)駛里程奠定基礎。
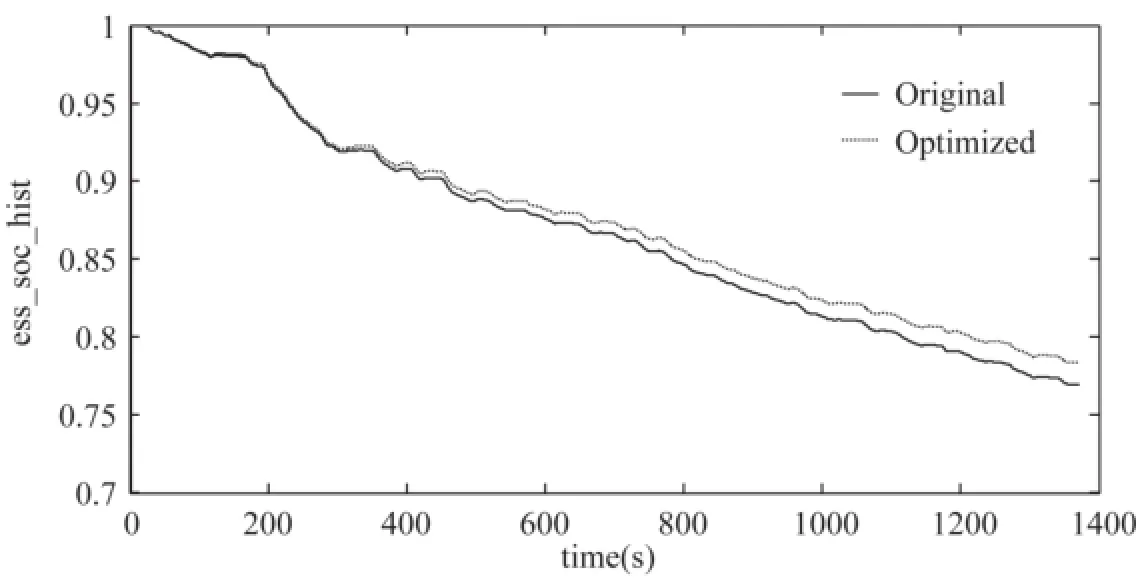
圖7 蓄電池剩余電量SOC對比圖Fig. 7 Comparison of battery's soc
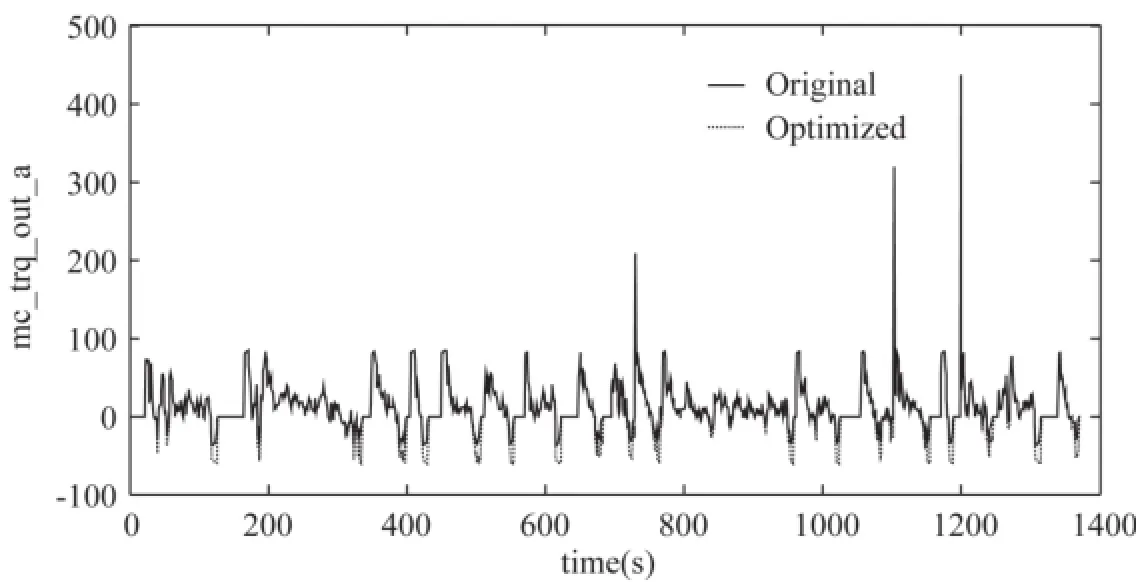
圖8 電機可輸出轉矩對比圖Fig. 8 Comparison of motor torque outputs achieved
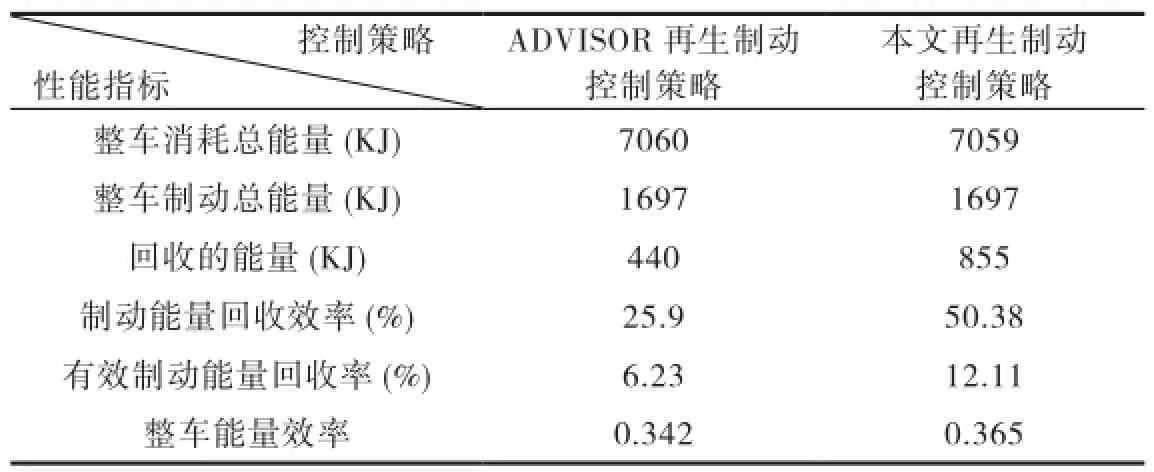
表2 再生制動能量回收效果對比Table 2 Comparison of Regenerative braking Energy recovery
5 結論
本文設計的基于模糊邏輯控制的制動力分配策略,利用此策略可以合理分配前輪電機制動力、前輪機械摩擦制動力和后輪機械摩擦制動力。通過在ADVISOR2002仿真軟件上修改制動策略模塊,并在城市道路工況CYC-UDDS工況下進行仿真對比實驗,驗證了所設計的控制策略能夠充分利用道路附著系數(shù),保證制動的穩(wěn)定性,并可以回收更多的制動能量,提高了電動汽車的續(xù)駛里程。
[1] 董瑞青. 新能源汽車發(fā)展戰(zhàn)略研究[J]. 新型工業(yè)化, 2011,(1): 18-24.
R Q Dong. Research on the development of New energy vehicle[J]. New Industrialization Straregy, 2011(1): 18-24.
[2] Wang L, Bai W. Development and Simulation of Electric Vehicle Based on ADVISOR[J]. Journal of Southeast university-English
Edition, 2006, 22(2): 196-199.
[3] SHI Qing-sheng. Key technologies research on energy management problems of pure electric vehicles[D]. Jinan: Shandong
University, School of Control Science and Engineering, 2009: 82-91.
[4] Yimin Gao, Liping Chen, Mehrdad Ehsani. Investigation of the Effectiveness of Regenerative Braking for EV and HEV[A]. SAE 2005-01-2910.
[5] Wang Yaonan, LIU Dongqi. A study of Mechanical and Electrical Compound Braking Force Distribution Strategy for Electric Vehicle[J]. Control Engineering of China, 21(3): 347-356, 2014.
[6] 趙國柱. 電動汽車再生制動穩(wěn)定性研究[D]. 南京: 南京航空航天大學, 2006.
Zhao Guozhu. Study on braking stability of regenerative braking system for electric vehicles[D]. Nanjing: Nanjing University of Aeronautics and Astronaotics, 2006.
[7] Nanjing: College of Energy and Power Engineering, Nanjing University of Aeronautics and Astronautics, 2006.
[8] 張昌利, 等. 雙能量源純電動汽車再生制動模糊控制與仿真[J]. 系統(tǒng)仿真學報, 2011,23(2): 233-238.
C L Zhang, et al. Fuzzy control modeling and Simulation of Regenerative Braking System for Pure Electric Vehicle with Dualsource Energy Storage System[J]. Journal of System Simulation, 2011, 23(2): 233-238.
[9] 徐國凱, 等. 基于模糊邏輯的電動汽車制動力分配及能量回收控制策略研究[J]. 大連民族學院學報, 2010, 12(3): 212-217.
G K Xu, et al. Research on Braking Force Distribution and Energy Recovery Control Strategy for Electric Vehicles Based on Fuzzy Logic[J]. Journal of Dalian Nationalities University, 2010, 12(3): 212-217.
[10] 何仁, 等. 電動汽車混合制動系統(tǒng)控制策略的改進[J]. 江蘇大學, 2013, 34(2): 125-131.
R Heng, et al. Improvement of control strategy in hybrid brake system of electric vehicle[J]. Journal of Jiangsu university, 2013, 34(2): 125-131.
[11] R Q Dong. Research on the development of New energy vehicle[J]. New Industrialization Straregy, 2011(1): 18-24.
Modeling and Simulation of Braking Force Distribution Strategy of Pure Electric Vehicle
JIANG Jianwei, YI Jiliang, HE Zhengyun, ZHOU Shuqing
(College of Electrical and Information Engineering, Hunan University of Technology, Zhuzhou 412007, China)
In order to ensure the safety of vehicle braking and improve the efficiency of energy recovery of electric vehicles at the same time, the author designs a new braking force distribution strategy based on fuzzy control based on the analysis of the common braking force distribution strategy. To overcome the shortcoming of the original control strategy, the braking strategy module of the ADVISOR 2002 is modified to dynamically adjust the braking force distribution ratio according to actual condition. Finally, combined with the typical road driving cycles, the proposed control strategy is simulated. The result shows it raises the recovery rate of braking energy and prolongs the mileage of the pure electric cars.
electric vehicle; braking force distribution; fuzzy logic control; ADVISOR software
10.3969/j.issn.2095-6649.2015.02.04
湖南省科技計劃資助項目(2014GK3001)。
姜建偉(1983-), 男, 山西忻州人, 碩士研究生, 主要研究方向:智能檢測和控制; 易吉良(1972-), 男, 湖南株洲人,湖南工業(yè)大學副教授, 主要研究方向: 電能質量分析, 數(shù)字信號處理研究。
姜建偉,易吉良,賀正蕓,等.純電動汽車制動力分配策略的建模與仿真[J].新型工業(yè)化,2015,5(2):19-26
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
中學生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
鐵道通信信號(2020年9期)2020-02-06 09:15:22
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
山東冶金(2019年3期)2019-07-10 00:54:04
數(shù)學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經(jīng)濟技術協(xié)作信息(2018年30期)2018-11-22 06:20:24
消費導刊(2018年10期)2018-08-20 02:57:02
數(shù)學大世界(2018年1期)2018-04-12 05:39:14
