運(yùn)動(dòng)目標(biāo)的超前預(yù)測(cè)跟蹤
2015-01-10 07:49:38左韜
科技視界 2015年32期
左 韜
(武漢科技大學(xué)信息科學(xué)與工程學(xué)院,湖北 武漢430081)
0 前言
運(yùn)動(dòng)目標(biāo)跟蹤廣泛應(yīng)用在雷達(dá)、視頻跟蹤、無(wú)線激光通信、天文觀測(cè)、航空攝影等領(lǐng)域,現(xiàn)有的運(yùn)動(dòng)目標(biāo)跟蹤方法一般都是在取得目標(biāo)運(yùn)動(dòng)狀態(tài)觀測(cè)值的情況下,應(yīng)用濾波方法得到狀態(tài)的最優(yōu)估計(jì)值,這種方法可以大幅度減小噪聲對(duì)跟蹤的影響,但卻無(wú)法克服跟蹤的滯后。在觀測(cè)噪聲影響不大的情況下,本文對(duì)運(yùn)動(dòng)目標(biāo)的狀態(tài)采取卡爾曼濾波先驗(yàn)預(yù)測(cè),可提前一步預(yù)測(cè)目標(biāo)的運(yùn)動(dòng)狀態(tài),跟蹤執(zhí)行機(jī)構(gòu)可超前預(yù)測(cè)跟蹤,從而克服跟蹤的滯后。
1 目標(biāo)運(yùn)動(dòng)模型
采用“當(dāng)前”統(tǒng)計(jì)模型建立目標(biāo)運(yùn)動(dòng)模型[1],得到目標(biāo)運(yùn)動(dòng)的狀態(tài)描述。該模型用修正的瑞利分布來描述加速度的“當(dāng)前”概率密度,本質(zhì)上是非零均值時(shí)間相關(guān)模型。以x(t)表示目標(biāo)的位置,表示目標(biāo)的速度,表示目標(biāo)的加速度,則狀態(tài)向量為:

目標(biāo)運(yùn)動(dòng)的“當(dāng)前”統(tǒng)計(jì)模型非零均值狀態(tài)方程表示為:
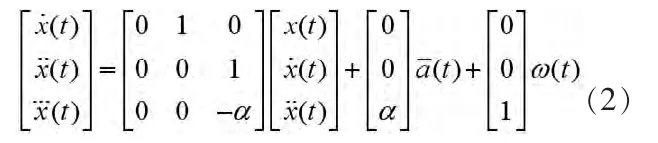
采樣周期為T時(shí)的離散狀態(tài)方程為

觀測(cè)方程為

W(k)、V(k)為均值為0的離散高斯白噪聲序列,當(dāng)只有位置數(shù)據(jù)可直接觀測(cè)時(shí),H(k)=[1 0 0]。
采用“當(dāng)前”統(tǒng)計(jì)模型描述目標(biāo)的運(yùn)動(dòng)狀態(tài),符合機(jī)動(dòng)運(yùn)動(dòng)的實(shí)際特性,能較好的反映目標(biāo)機(jī)動(dòng)范圍和強(qiáng)度的變化,且響應(yīng)速度快、跟蹤精度高。
2 卡爾曼濾波預(yù)測(cè)
對(duì)運(yùn)動(dòng)目標(biāo)建立當(dāng)前“統(tǒng)計(jì)”模型狀態(tài)方程和觀測(cè)方程之后,由卡爾曼濾波[3]可得到目標(biāo)運(yùn)動(dòng)狀態(tài)的預(yù)測(cè)值和最優(yōu)估計(jì)值,卡爾曼濾波由如下核心方程組成:
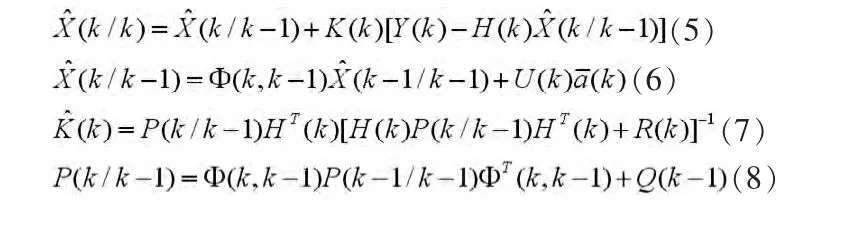

本文采用公式(6)實(shí)現(xiàn)對(duì)目標(biāo)運(yùn)動(dòng)狀態(tài)的超前一步預(yù)測(cè),也就是由已知的運(yùn)動(dòng)狀態(tài)預(yù)測(cè)下一時(shí)刻的運(yùn)動(dòng)狀態(tài),從而克服跟蹤的滯后,超前預(yù)測(cè)值是一種先驗(yàn)預(yù)估,預(yù)測(cè)精度低于后驗(yàn)最優(yōu)估值,雖然損失了精度,但可以提前一步預(yù)測(cè)跟蹤,在跟蹤滯后嚴(yán)重的情況下,可以取得較好的跟蹤效果。
3 仿真分析
通過跟蹤一個(gè)變速直線運(yùn)動(dòng)的目標(biāo)來驗(yàn)證超前預(yù)測(cè)跟蹤的性能。采樣周期T為1秒,仿真時(shí)間130秒,目標(biāo)初始位置在0.05km處,前100 s做0.05km/s的勻速運(yùn)動(dòng),101-130 s做0.0005 km/s2的勻加速運(yùn)動(dòng),觀測(cè)噪聲方差為0.02,均值為0。
對(duì)運(yùn)動(dòng)目標(biāo)做位置跟蹤,仿真結(jié)果如圖1、2所示。圖1為目標(biāo)的真實(shí)位置與超前預(yù)測(cè)位置分布,可見預(yù)測(cè)位置非常逼近真實(shí)位置曲線,圖2為目標(biāo)位置的超前預(yù)測(cè)誤差曲線,其均方根誤差為0.0518 km。

圖1 目標(biāo)位置超前預(yù)測(cè)

圖2 超前預(yù)測(cè)誤差
4 結(jié)論
本文建立機(jī)動(dòng)目標(biāo)的當(dāng)前統(tǒng)計(jì)運(yùn)動(dòng)模型,對(duì)運(yùn)動(dòng)目標(biāo)采用卡爾曼濾波預(yù)測(cè)跟蹤,可超前一步預(yù)測(cè)目標(biāo)的運(yùn)動(dòng)狀態(tài),通過仿真分析,驗(yàn)證了對(duì)變速運(yùn)動(dòng)目標(biāo)的位置超前預(yù)測(cè)有較好的跟蹤效果,可有效克服跟蹤的滯后。
[1]周宏仁,敬忠良,王德培.機(jī)動(dòng)目標(biāo)跟蹤[M].北京:國(guó)防工業(yè)出版社,1991.
[2]Jianfeng Wu,Gang Li,Fuzhou Ma.Research on target tracking algorithm using improved current statistical model[C]//2011 International Conference on Electrical and Control Engineering.2515-2517.
[3]Vinaykumar,M.,Jatoth,R.K..Performance evaluation of Alpha-Beta and Kalman filter for object tracking[C]//2014 International Conference on Advanced Communication Control and Computing Technologies.2014,1369-1373.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
電源技術(shù)(2016年9期)2016-02-27 09:05:39
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測(cè)與儀表(2015年24期)2015-04-09 12:04:36
