基于有限元仿真技術的花生收獲機關鍵結構參數優化*
2015-01-10 05:16:13朱衛衛
機械研究與應用 2015年6期
張 鵬,楊 勇,朱衛衛
(青島理工大學,山東青島 266520)
基于有限元仿真技術的花生收獲機關鍵結構參數優化*
張 鵬,楊 勇,朱衛衛
(青島理工大學,山東青島 266520)
花生收獲機的摘果物理過程是一個十分復雜的非線性動力學過程,該過程始終存在著摘果輥筒葉片與花生莢果之間的接觸碰撞作用,傳統的“試驗法”和“經驗法”在分析摘果過程時往往難以取得滿意的效果。采用有限元仿真技術研究花生收獲機的摘果物理過程,提出和研究了摘果物理過程有限元仿真的關鍵技術,開發了適用于該物理過程的有限元模型。進一步,利用該有限元模型進行了仿真分析,獲得了花生柄-果接點處的沖擊力變化曲線。為驗證有限元仿真分析的正確性,進行了摘果實驗,沖擊力仿真結果與實驗結果的一致性,表明所建立的有限元仿真模型是正確的。最后,基于有限元仿真分析對摘果機構的關鍵工作參數-輥筒轉速進行了優選,確定了最佳轉速范圍,同時,在分析現有輥筒葉片結構弊端的基礎上,對摘果輥筒進行了結構改進與優化。
花生收獲機;摘果機構;有限元仿真;優化
0 引 言
花生收獲機是花生生產機械化的重要設備,而摘果機構又是花生收獲機的重要組成部分,其性能的好壞將直接影響到花生聯合收獲機摘果率、破碎率以及生產率等指標[1-3],摘果機構的結構設計是否合理及參數選擇是否恰當將直接影響到花生收獲機的破碎率和凈摘率等性能指標。因此,對花生收獲機摘果機構的設計與優化已成為花生收獲裝備制造行業中的研究重點。
目前,在確定花生收獲機摘果機構時還還主要依靠“試驗”法和“經驗”法,這兩種方法存在盲目性大、消耗大量的人力和成本等方面的不足,并且難以取得令人滿意的效果。另外,在選擇結構及參數方面,還有基于數學算法的參數優化研究,但需要以大量的實際簡化為前提,優化結果與實際情況具有一定的差距。隨著計算機技術的不斷發展,有限元仿真技術成為研究花生收獲機摘果過程一個重要手段。當前,對花生收獲機摘果物理過程的有限元仿真研究較少。沈陽農業大學王東偉等人應用ANSYS-Workbench軟件對摘果輥筒進行過模態分析,得出了前6階固有頻率,證明了其輥筒的設計滿足了剛度要求[4];山東農業大學呂冰等人利用Pro/MECHANICA軟件對收獲機的挖掘鏟及鏟柄機構進行過有限元分析,在得到了位移、應變及應力云圖后,證明了挖掘鏟的最大應力與最大位移量均滿足設計要求[5];青島農業大學尚書旗等人采用動力學仿真分析軟件ADAMS建立了花生收獲機清選機構的虛擬樣機模型,并對收獲機清選機構的運動進行了仿真分析,得到了清選機構的運動學性能參數[6]。
本研究借助有限元仿真技術分析花生收獲機摘果機構的物理過程,深入研究有限元仿真涉及的關鍵技術,并開發適合的有限元模型;然后利用有限元模型,對摘果機構的關鍵參數——輥筒轉速進行了優選,確定了摘果輥筒的最佳轉速范圍;進一步,在掌握了花生收獲機摘果方式及輥筒直徑與葉片重疊度對摘果破碎率的影響機理之后,分析了現存摘果輥筒的結構弊端,并以降低破碎率為目的對摘果輥筒進行了結構優化,為進一步改進摘果裝置結構形式和研發
新產品提供了技術支持。
1 有限元仿真關鍵技術
1.1 求解算法控制
為保證仿真過程順利進行和獲得較為精確的結果,對求解算法的選擇和控制是首先應解決的關鍵技術[7]。隱式模擬所需要的增量步較少,但在其每個增量步中都需要求解整套剛度矩陣,求解較為費時且不易收斂,因此常用來求解靜態和準靜態問題,而不適于復雜接觸問題的求解。顯式求解算法采用中心差分法對運動方程進行顯示時間積分,避免了隱式方法中的迭代運算,減少了計算量,尤其適合求解具有復雜接觸屬性的高速動力學事件。摘果輥筒葉片與花生莢果碰撞沖擊時,其接觸狀態和沖擊力不斷發生變化,結構的相應變化也非常快,因此,本文研究采用顯式求解算法。
1.2 “剪切自鎖”控制
ABAQUS有限元軟件為用戶提供了豐富的的單元類型,主要有線性完全積分單元、線性減縮積分單元、二次完全積分單元和二次減縮積分單元四種,但其中大部分單元都存在“剪切自鎖”,使得單元過于剛硬,即使劃分很細網格而計算精度仍然很差[8-9]。花生收獲機摘果過程中,旋轉的輥筒葉片對花生莢果的拍打、梳拉力和果柄對果莢的拉力會使果莢受瞬時剪切力作用,因此,為避免出現“剪切自鎖”現象,本文的仿真分析選擇線性單元。
1.3 沙漏控制
動態響應分析中常采用顯示積分算法,其沒有隱式積分算法中所需要的整體剛度矩陣,避免了大量剛度矩陣求逆疊代的運算,但為了保留對動態問題的精確描述仍需要設定很小的時間增量步,這樣必然會引起大量微小時間增量步的循環計算,此時通常采用高斯積分一類的減縮數值積分來減少計算量[8],同時也可避免采用完全積分出現的“剪切自鎖”現象。但采用減縮單元最大的缺點是存在沙漏問題而使網格容易被扭曲,這是結構非線性動力響應數值分析中必須解決的關鍵技術之一。
沙漏控制方法主要有兩種:粘性阻尼力控制和剛度控制,ABAQUS軟件采用剛度控制,其在線性減縮積分單元中引入了“沙漏剛度”以限制沙漏模式的擴展。模型中的單元越多,這種剛度對沙漏模式的限制就越有效[10]。因此,可以通過劃分較多單元數目和劃分較細的網格來對克服沙漏問題。
2 有限元建模與分析
2.1 有限元建模
(1)輥筒有限元模型
為使模型能盡量反應實際情況,本文根據實際生產中使用的花生聯合收獲機輥筒尺寸,建立了其三維數字模型,鋼管輥筒厚度為4 mm,葉片厚度為3 mm,最外緣直徑200 mm,筒長600 mm,所選材料及性能見表1。

表1 模型材料性能表
采用掃掠網格劃分技術,應用線性減縮六面體C3D8R單元對輥筒和葉片進行網格劃分,結果如圖1 (a)所示。
(2)花生莢果有限元模型
依據花生莢果的基本形態尺寸,以兩端為球殼,中間為圓柱殼的殼體模型來模擬花生果莢。根據文獻[4]列出花生植株的材料性能參數,見表1。采用以四邊形為主的自由網格劃分技術,應用S4R四結點曲面薄殼單元對花生莢果進行網格劃分,結果如圖1 (b)所示。
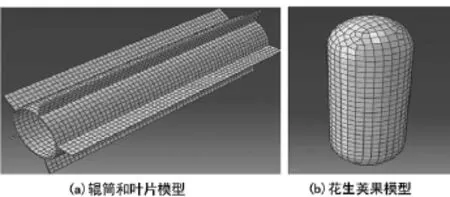
圖1 有限元模型及網格劃分
2.2 創建裝配件及定義分析步
輥筒葉片與花生果莢在實際碰撞過程中會有多個碰撞方向和角度,但為了研究簡便起見,本文主要以輥筒葉片與花生果發生正面碰撞的情形來進行分析[11]。在ABAQUS裝配模塊中對建立好的輥筒以及花生莢果模型進行裝配,保證輥筒葉片在旋轉過程中可以與花生柄-果接點所在平面發生正面碰撞,同時為避免出現因大量時間增量步迭代引起的收斂問題,在兩預接觸表面間只留有微小間隙,在圖2中可見裝配關系。
輥筒葉片對花生莢果拍打、沖擊直至其從果柄脫離的過程是十分短暫的,現取1 ms內花生莢果的狀態變化進行分析。在分析步模塊中創建一個單一動態、顯式(dynamic,explicit)分析步,時間長度設為0. 001 s,采用自動時間增量步,定義場輸出使可輸出花生柄-果結合處的沖擊作用力(RF)結果。
2.3 定義約束及接觸
因輥筒的剛度遠遠大于花生果莢剛度,因此可在輥筒的質心處選定參考點,然后在輥筒實體與質心參考點之間設定剛體約束,使輥筒成為剛體模型。采用顯式面-面接觸(surface to surface)類型設定輥筒葉片與花生莢果兩表面之間的的接觸,采用運動接觸算法和有限滑移進行控制,接觸情況如圖2所示。

圖2 輥筒與果莢的接觸設置
2.4 施加載荷、邊界條件及提交作業
摘果輥筒的臺架試驗表明當輥筒葉片對花生莢果的擊打頻率在5~6次/s時,摘果效果最佳[12]。現以6次/s的頻率,即360 n/min的轉速為輥筒施加初始角速度場,同時為輥筒質心位置的參考點添加轉動慣量,以使其繞默認坐標系的Z軸旋轉。
2.5 仿真結果
當輥筒葉片與花生柄-果接點所在平面發生正面碰撞時,考慮柄-果結合處的沖擊作用力情況。在輥筒轉速為360 n/min的情況下,花生柄-果接點處的沖擊作用力隨時間的變化情況如圖3所示。

圖3 輥筒轉速為360 n/min時的花生柄-果接點處沖擊力變化曲線圖
由上圖可知,輥筒葉片與花生莢果在大約0.23 ms時刻發生碰撞接觸,此時刻之后作用力逐漸增大;大約0.5 ms時刻,作用力達到峰值(約為40 N),之后沖擊效果減弱,作用力減小,此時刻的作用力值就可看作輥筒葉片對花生果莢的沖擊力,現作出0.5 ms時刻花生果莢的位移云圖及沖擊作用力云圖,分別如圖4、5所示。
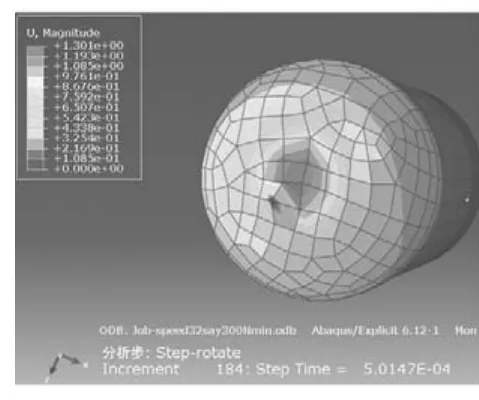
圖4 花生莢果的位移云圖

圖5 花生柄-果接點處的沖擊作用力云圖
3 實驗驗證
為驗證有限元仿真結果的正確性,進行了摘果實驗,采用壓電式動態測力儀測試沖擊力。測力儀與花生植株夾持示意圖如圖6所示。實驗儀器安裝與摘果沖擊力測試過程分別如圖7、8所示。

圖6 測力儀與植株夾持示意圖
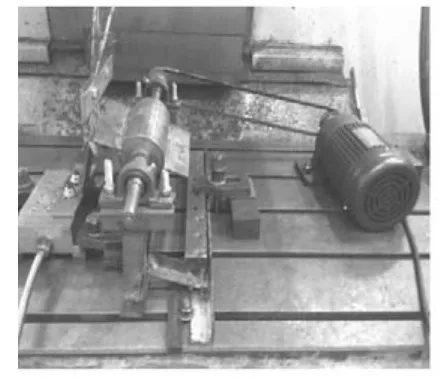
圖7 實驗儀器安裝

圖8 測試過程
摘果輥筒轉速為200 n/min和300 n/min下的沖擊力試驗結果如表2所示。
從上表可以看出,輥筒在200 n/min轉速下,三組試驗所得花生單果受輥筒葉片的沖擊力數值分別為13.793 N,17.375 N和18.167 N;求均值后,花生單果受沖擊力為16.445 N;輥筒在300 n/min轉速下,三組試驗所得花生單果受輥筒葉片的沖擊力數值
分別為35.339 N,32.658 5 N和33.8 N;求均值后,花生單果受沖擊力為33.8 N。

表2 花生單果沖擊力值 /N
同時,利用ABAQUS軟件分別作出輥筒在200 n/min和300 n/min轉速下摘果物理過程的仿真分析,得到花生單果受輥筒葉片的模擬沖擊力值分別為15.1 N和30 N。將仿真分析得到的沖擊力值與試驗所得沖擊力值比較如圖9所示。

圖9 沖擊力仿真值與試驗值比較圖
由上述對照圖可知,仿真分析所得沖擊力數值比試驗所得到的沖擊力數值小,且在200 n/min和300 n/min轉速下模擬數值與試驗數值偏差分別為8.2% 和11.2%。由此說明有限元仿真結果與試驗結果是比較一致,表明了本文所建立的有限元模型是正確的。
4 關鍵參數及結構優化
4.1 輥筒轉速優化
絕大多數半喂入式花生聯合收獲機都裝配有一對差相對輥式摘果輥筒,兩輥筒反向同速轉動,依靠旋轉葉片對花生莢果的梳拉和拍擊作用使莢果脫離果柄從而完成摘果作業。可見,摘果輥筒的轉速是影響收獲機摘果性能最為關鍵的因素之一,為了獲取最佳的摘果效果,有必要對摘果輥筒的轉速進行優化。
基于上述有限元模型進行輥筒轉速在160~420 n/min(以20為間隔)范圍內摘果物理過程的模擬分析,得到不同轉速下輥筒葉片對花生莢果的沖擊力作用數值,其數值結果折線圖如圖10所示。
根據花生植株的力學特性的研究結果及以上數據可知,若要防止花生果殼在摘果作業中不致破碎,摘果輥筒的最高轉速應為360 n/min(此時沖擊力值為40.1 N);若想進一步提升花生收獲機的凈摘率,減小摘取花生的帶柄率,要求摘果輥筒葉片對花生莢果的沖擊作用力值介于果-柄接點拉力值與秧-柄接點拉力值之間,即F∈(14 N,17 N)。根據圖10的數據結果可知,當輥筒轉速分布在180~220 n/min之間時,輥筒葉片對花生莢果的沖擊作用力值分布在12.22~18.32 N之間,為了確定出(14 N,17 N)區間力值所對應的輥筒轉速,繼續做出180~220 n/min(以5為間隔)轉速范圍內的摘果過程有限元仿真模擬,得到摘果葉片對花生莢果的作用力值數據如圖11所示。
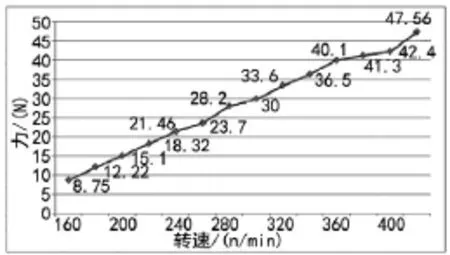
圖10 不同轉速下(160~420 n/min)輥筒葉片對花生莢果的沖擊作用力值

圖11 不同轉速下(180~220 n/min)輥筒葉片對花生莢果的作用力值折線圖
根據花生植株的力學特性的研究結果及上圖數據可知,當摘果輥筒轉速在195~215 n/min內時,花生收獲機摘果機構可較干凈地摘取花生莢果,即花生柄-果接點斷裂,而秧-柄接點未斷裂,花生莢果可單獨由秧蔓脫落且果殼不會破碎。
4.2 摘果輥筒結構優化
為了改進花生收獲機摘果機構摘果方式以便降低收獲機摘果破碎率,對輥筒的葉片結構進行了優化。
(1)改進結構及其優點

圖12 改進后的摘果輥筒示意圖
改進后的摘果輥筒軸測圖及側視圖分別如上圖12(a)及圖17(b)所示,改進后的新型摘果輥筒主要由輥筒軸1、固定板2、活動板3以及防破碎橡膠板4組成。其中,摘果輥筒軸1的外周均布焊接有一定數量(此處為5)的固定板2,其外端配有同等數量的活動板3,活動板3搭接在固定板2上后兩者通過螺栓連接(5為螺栓,6為彈簧墊圈,7為螺母);活動板3的末端接有防破碎橡膠板4,活動板3插入橡膠板4的卡槽后,兩者硫化膠結在一起。
摘果部位采用防破碎的橡膠材料葉片代替原金屬材料板,同時在此橡膠板塊底部的摘果部位開設有軸向防滑條紋,可增大摘果橡膠板對花生莢果產生的梳拉摩擦力以便摘果,圖13所示為摘果部位的局部放大圖。另外,為方便調節輥筒徑向安裝尺寸及葉片重疊距離,在固定板2及活動板3上均開設有徑向長槽,然后通過螺栓將兩者連接,如圖13所示。

圖13 摘果部位局部放大圖
(2)改進結構的優點
①摘果部位采用橡膠材料板替代通用鋼鐵板,并在橡膠板底部開設軸向防滑條紋,增大摩擦,依靠摩擦和梳拉共同作用完成摘果作業,且過程更加柔和,避免了高速旋轉的金屬材料板強烈沖擊花生莢果導致碎果的現象,降低摘果破碎率;②固定板與活動板的搭接處均開設長槽后通過螺栓連接,方便調節徑向安裝尺寸及雙輥筒葉片重疊度。
5 結 論
(1)提出了一種基于有限元仿真技術的花生收獲機摘果機構關鍵參數優化方法。深入研究了摘果物理過程有限元仿真的關鍵技術,開發了適用于該物理過程的有限元模型。并利用該有限元模型進行了仿真分析,獲得了花生柄-果接點處的沖擊力變化曲線。沖擊力仿真結果與實驗結果的一致性,表明所建立的有限元仿真模型是正確的。基于有限元模型對摘果機構的關鍵工作參數——輥筒轉速進行了優選,確定了最佳轉速范圍。
(2)研究結果表明:若在保證花生果殼不破碎的情況下順利完成摘果作業,摘果葉片對花生莢果產生的沖擊作用力值應分布為14~40 N,利用有限元分析確定了對應的輥筒轉速范圍為195~360 n/min。
(3)分析了輥筒葉片重疊度對摘果破碎率的影響,并在分析現有輥筒直徑及葉片重疊度不可調的結構弊端基礎上,以降低摘果破碎率為目標對摘果輥筒進行了結構改進,設計了一種徑向位移和葉片重疊度可調的新型摘果輥筒葉片。
[1]孫同珍,尚書旗,李國瑩,等.4HQL-2型花生聯合收獲機摘果及清選部件的研制[J].農機化研究,2009(6):54-56.
[2]王東偉,尚書旗,韓 坤.4HJL-2型花生聯合收獲機摘果機構的設計與試驗[J].農業工程學院,2013,29(14):15-16.
[3]Kenneth X Satlic,Manufature K.Peanut Harvesting Equipment[Z]. Agriculturalmachine,1998:2-6.
[4]王東偉.花生聯合收獲機關鍵裝置的研究[D].沈陽:沈陽農業大學,2013.
[5]呂 冰.振動式花生收獲機的設計與仿真[D].泰安:山東農業大學,2013.
[6]胡彩旗,劉 帥,尚書旗.基于ADAMS的花生收獲機清選機構運動仿真分析[J].農機化研究,2013(10):38-41.
[7]李國強.半喂入式花生摘果機的研制[D].北京:中國農業大學,2007.
[8]Yang Ranbing,Xu Yufeng,Liagn Jie.Test and Analysis of Mechanical Properties of Peanut Root,Stem and Nut Node in Mechanical Harvest[J].Transaction of the CSAE,2009,25(9):128-131.
[9]李建東.花生脫殼裝置的試驗研究[D].青島:青島農業大學,2007.
[10]梁 明,欒玉娜.收獲后花生植株力學特性研究[J].農業科技與裝備,2013(2):1-2.
[11]鐘文彬.含彈性元件機械系統的碰撞與沖擊研究[D].成都:西南交通大學,2008.
[12]于向濤,胡志超,顧峰瑋,等.花生摘果機械的概況與發展[J].中國農機化,2011(3):12-13.
Optim ization of Key Structural Parameters of Peanut Harvester Based on Finite Element Simulation Technology
ZHANG Peng,YANG Yong,ZHUWei-wei
(Qingdao Technological University,Qingdao Shandong 266033,China)
Picking physical process of the peanut harvester is a very complex nonlinear dynamical process for there is always collision of picking roller blade and pod,the traditional"testmethod"and the"thumb"are often difficult to obtain satisfactory results in analysis of picking process.The picking physical process of peanutharvester is studied by using the finite element simulation technique,and the key technologies of finite element simulation on the physical processes are also studied,then the finite elementmodel which is applied to the physical process is developed.Furthermore,simulation analysis is conducted by using the finite elementmodel;the impact force curve of peanut handle-fruit junction is obtained.In order to verify the correctness of finite element simulation analysis,picking experiments are conducted;the results show that the impact simulation and the experimental results are consistent,which indicates that the established FEM model is correct.Finally,roller speed,which is the key operating parameter of the pickingmechanism,is optimized based on the finite element simulation analysis to determine the optimal speed range,while the structural improvementand optimization of the picking roller are conducted based on the analysis of existing structural drawbacks of roller blades.
peanut harvester;pickingmechanism;finite element simulation;optimization
S225
A
1007-4414(2015)06-0044-05
10.16576/j.cnki.1007-4414.2015.06.017
2015-09-24
青島市民生科技計劃項目:花生聯合收獲機數字化設計關鍵技術項目(編號:13-1-3-75-nsh)
張 鵬(1990-),男,山東煙臺人,在讀碩士研究生,研究方向:先進制造理論與技術。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24