內浮頂儲油罐清洗機器人研究現狀與發展
2015-01-12 05:30:52鄭霄峰代峰燕李冬冬陳家慶
油氣田地面工程 2015年10期
關鍵詞:作業
鄭霄峰 代峰燕 李冬冬 陳家慶
1北京石油化工學院能源工程先進連接技術北京市高等學校工程研究中心
2北京石油化工學院
內浮頂儲油罐清洗機器人研究現狀與發展
鄭霄峰1代峰燕1李冬冬1陳家慶2
1北京石油化工學院能源工程先進連接技術北京市高等學校工程研究中心
2北京石油化工學院
根據內浮頂儲油罐清洗機器人的作業環境和功能要求,對國內外內浮頂儲油罐清洗機器人的研究現狀進行了綜合分析。儲油罐清洗機器人結構形式設計包括移動機構分析、進罐結構分析和清洗裝置分析;控制系統包括通訊方式分析、控制方式分析、路徑規劃分析和控制策略研究等。對比國外NESL、Landary等公司主要產品的性能,國內相關產品防爆設計經驗不足,沒有配套臍帶纜,機器人收放纜控制和遠程無人控制缺少理論分析和實驗驗證,行走性能與清洗效率有待改進與優化。對于內浮頂儲油罐清洗機器人而言,安全環保、高效率、低成本將成為未來的發展趨勢。
內浮頂儲油罐;儲油罐清洗;機器人;控制系統;防爆設計
根據國家規定,原油及成品油儲罐大修間隔期限為5~7年,在檢修或更換油品之前必須清洗;我國石化行業一般規定(Q/SH039-013—1988)成品油儲罐每3~5年應清洗檢修一次,因此,需要定期對沉積在罐內的油泥進行清理和回收。儲油罐清洗技術先后經歷了人工清洗和機械清洗階段,隨著人們對儲油罐清洗作業安全、效率、成本、環保要求的不斷提高,儲罐清洗機器人技術作為一種無需人員進罐的清洗技術得到了國內外越來越多的關注。
1 作業環境和功能要求
早期儲油罐清洗機器人的研究主要針對原油罐,儲油罐的結構也較簡單;隨著《儲油庫大氣污染物排放標準(GB20950―2007)》等國家標準的出臺實施,為減少蒸發損耗和大氣污染問題,內浮頂儲油罐在各種油庫中應用日益廣泛。根據國家標準GB50341―2003和行業標準SH3046―1992規定,內浮頂儲油罐罐壁至少開有1個鋼質人孔,罐壁人孔直徑不小于DN500,中心高度介于650~915 mm;內浮頂儲油罐的浮盤在罐內成品油排盡之后由底部的眾多支柱支撐,浮盤高度不低于1 800 mm,浮盤支柱間隔在1 000 mm左右,浮盤和支柱大多為鋁質結構,強度較低易發生變形;此外罐底還存在進出油管、擴散管、量油管、加熱器、脹油管等附件。作業時罐內充滿了水霧,視線昏暗模糊,圖像定位傳感器不能正常發揮作用,電磁信號則容易受到罐體鋼質結構的干擾。罐內充滿油氣,根據國家標準GB50058―2014對爆炸性危險場所的定義和劃分,罐內區域屬于0區(置入惰性氣體可適當降低),罐外區域根據現場情況可劃分為1區、2區或安全區。
針對儲油罐清洗機器人的作業環境,提出了如下功能要求:
(1)機械結構簡單緊湊,能對照明攝像設備進行保護和清潔,可組裝不同清洗模塊,行走牽引力大,承載能力強,攜帶油泥少,清洗效率高,具備抗靜電、防碰撞、耐腐蝕和防沉陷能力。
(2)能實時監控工作環境,實時定位、預定軌跡跟蹤、自主避障。
(3)最大行駛速度0.15 m/s,轉彎半徑不大于1 m,爬行坡度不小于20°,行進深度不小于10 m。
(4)采用防爆工藝設計和制造。
2 結構形式設計
2.1 油罐清洗機器人移動機構研究
油罐清洗機器人按移動機構的形式可以分為吸附式、車輪式和履帶式。吸附式移動機構的優點在于能在罐壁行走,適應地形能力強,還可兼備油罐檢測、維修、噴漆的功能,是一種多用途機器人。李春香等[1]根據油罐清洗的工藝流程,提出了一種如圖1所示用于油罐清洗的壁虎式移動機構,該機構具有貼附和移動功能。上海交通大學[2]開發了一種如圖2所示的罐壁爬行機器人,由磁盤驅動模塊、變磁力吸附模塊、轉向調節模塊組成,可用于儲油罐罐壁的清洗和檢測作業。由于吸附式機器人不能承受較大的負載,故其清洗能力較弱,對于清洗作業量主要集中于浮盤和罐底之間區域的內浮頂罐來說,吸附式機器人清洗效率較低。
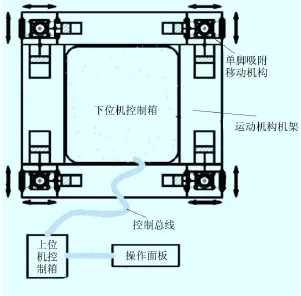
圖1 壁虎式移動機構
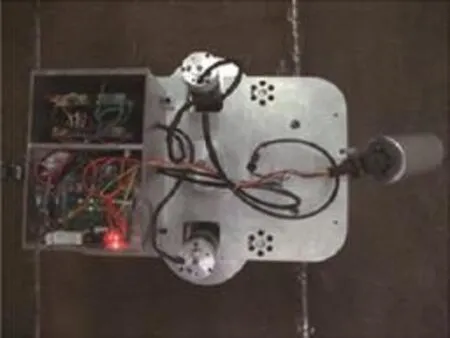
圖2 罐壁爬行機器人
車輪式移動機構具有高度的運動靈活性和高效率的特點。周利坤等[3]介紹了一種如圖3所示全方位輪式清洗機器人,采用了三個全向單元對稱布局的三輪全方位移動機構,可進行類似于吸掃式清掃車的吸掃作業。圖4是中國石油大學[4]開發的污水沉降罐在線清洗裝置,其主體是由微型伺服電動機驅動的輪式移動小車,車體上裝有射流元件及虹吸裝置,作業時先將車底油泥清理干凈,以保證其運動的平穩性。車輪式移動結構其越障能力和地形適應能力差、轉彎效率低,所以較多使用于底泥較薄的汽油、煤油油罐,不適合在底泥較厚的柴油與原油油罐中使用。
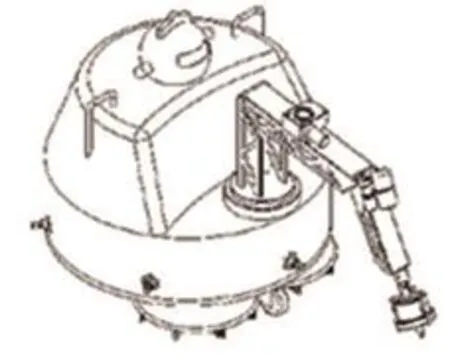
圖3 全方位輪式清洗機器人
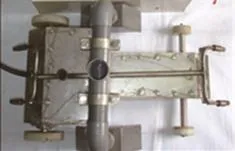
圖4 污水沉降罐清洗小車
履帶式移動結構是目前使用最普遍的移動結構,其越障能力、地形適應能力強,可原地轉彎,能適應各種類型的油罐。比較有代表性的是英國Surface Control公司開發的用于清洗油罐的真空槽車[5]、美國Petroleum Ferment公司開發的用于流化和噴擊底泥的完全水力車[6]、美國Offshore Cleaning Systems公司開發的Industrobot[7](見圖5)和美國Landary服務公司開發的遙控自動小車[8]等(見圖6)。

圖5 Industrobot H5清洗機器人
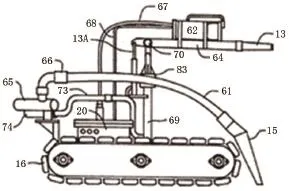
圖6 Landary遙控自動小車
2.2 油罐清洗機器人進罐結構研究
對于目前主流的履帶式油罐清洗機器人,其本體結構大多采用了組裝式和變形式兩種。組裝式機器人往往體積大,質量大,機器人需要在罐外拆分后通過人孔運入罐內,最后派遣技術熟練的工人進入罐內完成組裝。拉格比Hydrovac工業和石油服務有限公司[9-10]開發了一種如圖7所示的被稱為水利推土機(Hydrodozer)的罐內底泥清洗履帶式小車,小車由推土檔板、機械吊桶和帶壓噴射清洗頭組成,采用液壓驅動能夠方便地拆解成不同部分,進入油罐內進行組裝。鄧三鵬等[11]介紹了一種如圖8所示的油罐油泥清理機器人系統,其機械結構由左履帶、右履帶、推鏟、主體和云臺五個模塊組成,分體模塊均可以通過罐壁人孔運入罐內,這種模塊化設計解決了機器人的進罐問題。組裝式機器人需要借助外部動力才能將各個部件運送到儲油罐內部,人員進罐組裝時需要做好安全防護,不僅耗時耗力而且存在著安全隱患。

圖7 Hydrodozer水利推土機

圖8 油泥清理機器人

圖9 NESL遠程遙控清洗小車
變形式機器人通過改變形狀以減小徑向包絡圓直徑,在收縮形態下依靠自身動力,通過罐壁人孔進入儲油罐內部,隨后伸展至展開形態進行清洗作業。圖9所示為英國NESL公司[12]開發的遠程遙控清洗小車,液壓驅動,通過位于底部和前部的兩個液壓油缸驅動連桿機構來分別改變底盤軌距和抬放噴頭支架,進而實現形態變化。圖10所示為美國Landary服務公司開發的折疊式自動進罐小車,通過一個液壓油缸驅動連桿機構能同時改變履帶底盤的軌距和噴頭的位置[13]。變形式機器人機械結構、液壓系統和控制系統較為復雜,但是可以真正意義上實現非人員進罐清洗作業,有利于實現自動化控制并提高工作效率。
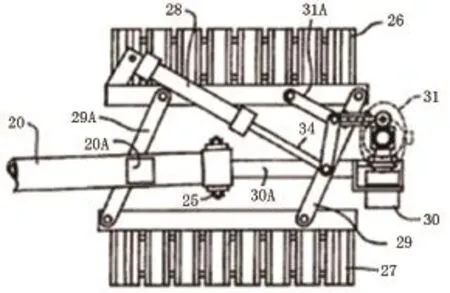
圖10 Landary折疊式自動進罐小車
2.3 油罐清洗機器人清洗裝置研究
清洗裝置決定了機器人搭載機構的形式,根據采用的清洗工藝,常見的清洗裝置可以分為三類:用于機械破碎底泥的工具、通過高壓水射流流化底泥的各類噴頭、用來抽吸底泥固液混合物的抽污泵。清洗機器人可以只攜帶一種裝置,也可以攜帶幾種裝置配合使用。英國NESL公司[14]研發了一種如圖11所示的Comebi Moverjet小車,噴頭固定在云臺上,可以靈活地控制水射流的方向,流化后的底泥被安裝在底盤前端的吸嘴抽出。新加坡Enviro-Force公司[15]研發的Tank Cleaning Tractor隨車攜帶移動抽污泵,前端安裝有動力螺旋刀具,能有效打碎底泥,流化后的底泥固液混合物通過位于刀具后方的通道被泵吸到罐外進行下一步的處理。意大利Gerotto Federico公司[16]研發的Lombrico微型抽吸挖掘機,由工業真空吸塵器、微型挖掘機和攝像照明設備等組成,特制的吸嘴可以對底泥邊挖邊吸。三種清洗裝置中,噴頭和抽污泵能較好地清洗成品油罐;機械破碎工具常用于底泥很厚的原油罐,而不適用于成品油罐。

圖11 ComebiMoverjet小車
3 控制系統研究
考慮到機器人所處的環境是爆炸性危險場所,所用電氣設備需要采用防爆型式,受制于早期防爆產品匱乏和價格昂貴,且由于國內外內浮頂儲油罐結構不盡相同,國外諸如NESL等公司開發的遠程遙控清洗小車、意大利Gerotto Federico公司研發的Lombrico微型抽吸挖掘機、Landary服務公司開發的遙控自動小車等均采用了液壓驅動、有線通訊、遙控控制的方式。機器人攜帶作業時,攜帶CCD攝像頭、LED照明燈、可燃氣體傳感器和氧氣傳感器。操作人員在位于安全區域的控制室內通過車載攝像頭來監視機器人行進狀態和清洗效果;通過在人孔或者浮盤加裝全局攝像頭來觀察機器人在罐內位置,以及確定清洗區域;通過可燃氣體傳感器和氧氣傳感器來實時檢測罐內油氣與氧氣濃度,確保作業安全。
國內鄧三鵬等[17]研制油泥清理機器人,可依據圖像采集及顯示裝置顯示的情況手動操縱機器人行走、清理工作,或者使其按照設定的程序行走并進行自動清理。周利坤等[18]研制的全方位移動清洗機器人包括通訊傳感單元、控制單元和供電單元,通訊傳感單元能檢測周圍環境和機器人的各種信息,并反饋給遠程控制單元;控制單元包括了人工控制模塊和智能控制模塊。
隨著防爆技術的不斷發展,大量防爆產品出現,可供機器人選擇的各類電氣設備逐漸增多,使先進控制理論與技術、計算機技術在儲油罐清洗機器人控制系統上的應用成為可能。我國在儲油罐清洗機器人控制方面開展了路徑規劃和行走控制策略等研究,提出了全覆蓋遍歷路徑規劃方法及評價指標與基于PLC的電液閉環控制策略[19-21]。
4 總結與展望
國外早在1986就開始了相關研究,目前已經有類型眾多的適用于內浮頂儲油罐清洗機器人投入使用,許多提供優質儲油罐清洗服務的公司基于機器人技術設計了先進的非人員進罐清洗系統,并在實踐中取得了良好的效果[22]。由于國外在內浮頂儲油罐結構(國外沒有浮盤支柱)以及對作業管理要求(國外通過置入惰性氣體能夠保證罐內為1區)上與國內存在著差異,國內機器人作業環境相對來說更為苛刻,雖然國內在儲油罐清洗機器人領域開展的相關研究取得了一定進展,提出了一些行走和控制方案并研制出了相關樣機,但是尚沒有適合于內浮頂儲油罐的相關產品在商業中應用。機器人清洗與行走裝置對罐內復雜環境的適應性、清洗效果、控制性能、安全保障與經濟效益等問題還有待進一步深入研究。總體來說,儲油罐清洗機器人技術在國內處于研究探索階段。
對于我國內浮頂儲油罐清洗機器人研發而言,仍有一些亟待解決的難題:
(1)防爆設計。避免發生靜電集聚,避免產生碰撞火花,機器人進罐應有引導機制,防止與人孔碰撞,機器人進入危險區域內攜帶的電氣設備需要達到相應的防爆等級,電氣連接符合防爆型式的要求,減少電氣使用并盡量避免中間接線。
(2)臍帶纜的設計及收放纜控制。機器人拖拽的臍帶纜需要具備耐磨、耐疲勞、耐腐蝕、防靜電、抗拉的特點;同時臍帶纜的收放要匹配機器人的控制,機器人行走過程中應當避免摩擦、碾壓和纏繞臍帶纜。
(3)遠程無人控制。實現機器人作業工況的實時監控、故障診斷和抗干擾通信,合理地規劃路徑及可靠地自主避障。
(4)行走性能與清洗效率。行走裝置具備對復雜地形的適應能力,實現底泥高效清洗及清洗機構參數的優化。
[1]李春香,何宏鷹,鐘碧良.油罐清洗系統移動機構的研究[J].石油化工高等學校學報,2006,19(2):64-66+88.
[2]聞靖.罐壁爬行機器人本體設計及其特性研究[D].上海:上海交通大學,2011:15-23.
[3]李悅,周利坤.油罐清洗機器人全方位移動機構的設計與分析[J].機械設計與制造,2013(11):73-75.
[4]王霞.污水沉降罐在線清洗裝置結構開發[D].北京:中國石油大學,2011:13-20.
[5]Brown J.A vacuum tanker for cleaning storage tanks[J].Process Engineering,1989,70(11):33.
[6]Petroleum Ferment.Cleaning sludge from oil storage tank-using entirely hydraulic vehicle to fluidize sludge and jet resultant mix:4770711[P].1988-09-13.
[7]Offshore Cleaning Systems.Offshore cleaning systems company profile[EB/OL].(2013-02)[2015-06].http://offshorecleaningsystems.comithost.net/wp-content/uploads/2013/07/OCS-Company-Brochure-2013.pdf.
[8]Kenneth C Landry,Borg Paul.Tank cleaning system using remotely controlled robotic vehicle:5561883[P].1996-10-08.
[9]Hydrovac industrial&petroleum Serv.(Oil storage)tank cleaning made easy with quick assembly unit[J].Chem Eng(Rugby),1986,431(12):34.
[10]Tradebe.Hydrodozer[EB/OL].(2012-04)[2015-06].http:// www.tradeberefineryservices.com/equipment/hydrodozer/.
[11]鄧三鵬,李充寧,張興會,等.儲油罐油泥清理機器人[J].油氣田地面工程,2011,30(4):100-101.
[12]Non Entry Systems Ltd.The all new NESL superior[EB/OL].(2014-07)[2015-06].http://www.nonentry.co.uk/Manway_Cannon.htm.
[13]Kenneth Charles Landry,Arnold Kermit Ray.Tank cleaning system using collapsible robotic tank entry vehicle:5640982[P].1997-06-24.
[14]Non Entry Systems Ltd.NES COMBI 3 in 1 Unit[EB/OL].(2013-05)[2015-06].http://www.nonentrysystems.com/brochures/ combi.pdf.
[15]Enviro-Force Pte Ltd.No man entry tank cleaning track pump[EB/ OL].(2009-03)[2015-06].http://www.enviroforce.com/ download/NoManEntryTankCleaningTrackPump.pdf.
[16]Gerotto Federico S R L.Miniexcavator LOMBRICO ATEX for no man risk[EB/OL].(2014-07)[2015-06].http://www.gerotto.it/portals/0/LOMBRICO_ATEX.pdf.
[17]鄧三鵬,李充寧,王創榮,等.基于PLC的儲油罐清理機器人自動控制系統:101989078[P].2011-03-23.
[18]周利坤,戰仁軍,李悅.一種油罐清洗機器人:102764750[P].2012-11-07.
[19]周利坤,李悅.油罐清洗機器人全覆蓋遍歷路徑規劃方法[J].機械設計與制造,2014(7):175-178.
[20]鄧三鵬,劉剛,吳立國,等.基于PLC的儲油罐清理機器人液壓系統設計[J].液壓與氣動,2013,(3):35-37.
[21]李悅,周利坤,馮建偉,等.基于PLC與電液伺服的油罐清洗機器人控制系統設計[J].機床與液壓,2014,42(9):37-40.
[22]石熠,陳家慶,劉美麗,等.大型立式儲油罐機械清洗技術及其工程應用進展[J].油氣儲運,2015,34(2):129-133.
(欄目主持 紀嫦杰)
10.3969/j.issn.1006-6896.2015.10.002
鄭霄峰:在讀碩士研究生,2013年畢業于華北水利水電大學機械學院,從事光電檢測與機器人技術研究工作。
2015-03-04
基金論文:2014年度北京市屬高等學校“長城學者”培養計劃資助項目(CIT&TCD20150317)。
13146082418、zheng11098938@foxmail.com
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08