基于非線性滑模面的多PMSM 變結構同步控制
2015-01-13 10:10:30曹玲芝謝曉磊
微特電機 2015年6期
曹玲芝,王 宏,謝曉磊
(鄭州輕工業學院,鄭州450002)
0 引 言
隨著現代工業生產自動化水平的逐步提高和生產規模的逐漸擴大,越來越多的生產領域,如拉拔、紡織、印染、造紙、軋鋼等需要多電機的同步控制。在這些領域中多電機的同步控制的好壞,直接影響到生產效率和產品質量[1]。然而多電機的同步性能會受到各傳動軸的驅動特性不匹配、負載擾動等因素的影響,因此,多電機的同步控制成為研究的熱點和難點[2]。
目前存在的多電機耦合控制方法主要有主從控制、虛擬總軸控制、交叉耦合控制、偏交叉耦合控制和相鄰交叉耦合控制[3-6]。其中相鄰交叉耦合控制在同步誤差控制過程中只考慮相鄰兩臺電機的同步狀態,使控制系統得到簡化,所以非常適用于數目較多電機的同步控制。本文在相鄰交叉耦合控制的基礎上把首尾兩臺電機耦合建立了相鄰交叉耦合環形系統。
在多電機的同步控制中,控制算法的好壞直接影響著系統的可靠性和同步精度[7]。常規的PID控制要求控制對象建模要準確,且容易受到外部擾動和內部參數變化的影響,所以很難使控制達到滿意的調速或定位性能[8]。滑模變結構控制(SMC)自20 世紀50 年代出現,由于其響應快速、對參數變化及擾動不靈敏、無需系統在線辨識、物理實現簡單等優點,被廣泛應用于各種控制系統中[9]。關于滑模變結構控制當滑模面為線性時,在采用飽和函數削弱滑模控制的抖振問題時,存在著控制精度和削弱抖振之間的矛盾[10],針對這個問題,本文提出了非線性滑模面的變結構控制,運用這種控制方法再采用飽和函數削弱抖振的同時,能夠保證控制的精度。
1 永磁同步電機的數學模型
永磁同步電機在忽略鐵心飽和、氣隙磁場正弦分布、不計渦流和磁滯損耗、轉子上沒有阻尼繞組、永磁體也沒有阻尼作用,且Ld=Lq=La,在d,q 旋轉坐標系下建立數學模型:

式中:Ra為定子電阻;ω 為轉子旋轉的電角度;ψf為永磁體磁通;D 為微分算子,D=d/dt;id,iq為d,q 軸定子電流;ud,uq為d,q 軸定子電壓;Ld,Lq為交、直軸電感。
永磁同步電機的轉矩方程:

永磁同步電機的運動方程:

式中:p 為極對數;J 為轉動慣量;TL為負載轉矩。
2 相鄰交叉耦合環形系統
相鄰交叉耦合控制是針對每一臺電機僅考慮它和相鄰兩臺電機的狀態誤差,例如要對n 臺電機進行同步控制,其中的第i 臺電機除了要對它相對于設定的參考轉速的跟蹤誤差進行控制,還要控制它和第i-1 臺和第i+1 臺電機的同步誤差。
第i-1,i,i+1 臺電機的跟蹤誤差分別:
式中:ω*為設定的參考轉速;e(i-1)(i-1)為第i-1 臺電機的跟蹤誤差;ωi-1為第i-1 臺電機的反饋轉速;eii為第i 臺電機的跟蹤誤差;ωi為第i 臺電機的反饋轉速;e(i+1)(i+1)為第i +1 臺電機的跟蹤誤差;ωi+1為第i+1 臺電機的反饋轉速。第i 臺電機和第i-1 臺電機的同步誤差:

式中:ei(i-1)為第i 臺和第i-1 臺電機的同步誤差。
第i 臺電機和第i+1 臺電機的同步誤差:

式中:ei(i+1)為第i 臺和第i+1 臺電機的同步誤差。
對n 臺電機進行同步控制,把第n 臺電機和第1 臺電機進行耦合,這樣對n 臺電機的同步耦合控制就形成了一個首尾相連的圓環,從而組成了相鄰交叉耦合環形控制系統。
例如4 臺電機相鄰交叉耦合環形系統的控制框圖如圖1 所示。
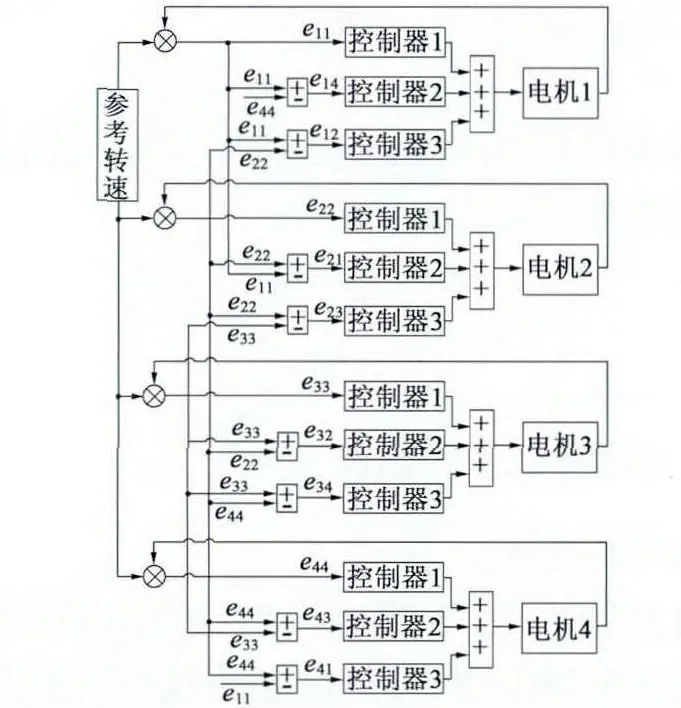
圖1 4 臺電機的相鄰交叉耦合環形同步控制系統
每一臺電機有3 個控制器,控制器1 是跟蹤誤差控制器,控制器2,3 為同步誤差控制器,對于第i臺電機希望的控制結果是在很短的時間內所有的誤差趨于零,即:

3 控制器的設計
3.1 跟蹤誤差控制的數學模型
取永磁同步電機的狀態變量:
式中:ω*為設定的轉速;ω 為反饋轉速;x1為跟蹤誤差。
由永磁同步電機的數學模型式(2)、式(3)得:
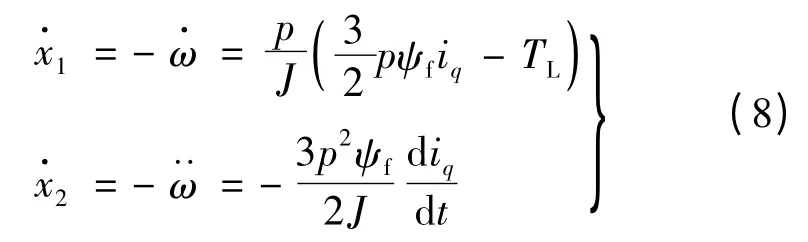
根據式(8)可把永磁同步電機跟蹤誤差控制描述為如下形式:

3.2 同步誤差控制的數學模型
對于第i-1 臺和第i+1 臺電機取狀態變量:

式中:e1為同步誤差。
由永磁同步電機的數學模型式(2)、式(3)得:
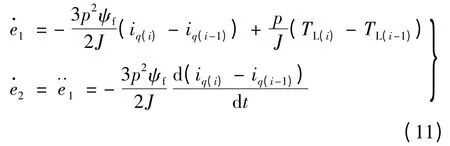
根據式(11)可以把多永磁同步電機同步誤差控制描述為如下形式:

3.3 控制器的設計
通過比較式(9)和式(12)可以得出跟蹤誤差控制的狀態方程和同步誤差控制的狀態方程形式相同,因此控制器u1和控制器u2可以相同,可以把式(9)和式(12)統一表示為如下形式:
設計非線性滑模面為如下形式:

此時:


把u 代入到式(16)得:
從式(18)可以得出,當滑模面s 取非線性滑模面式(14),控制器u 取式(17)時,ss· 在全局內都滿足<0 的到達條件,這樣在控制的過程中不會出現超調量,能夠提高控制效率。
4 削弱滑模變結構控制的抖振
從式(17)可以看出,控制器u 中含有切換函數sign(s),為了削弱抖振,常采用飽和函數來代替切換函數,飽和函數的形式如下:
飽和函數有一個邊界層厚度δ,邊界層厚度越大,削弱抖振的能力越強,但是邊界層厚度越大,使最終的狀態變量不能收斂到原點,而是收斂到原點的一個鄰域內,這樣就造成了最終的控制誤差[10]。所以用飽和函數削弱抖振,存在著削弱抖振和產生最終控制誤差的矛盾。
比如采用線性滑模面如下:
此時結合飽和函數式(19),讓δ=20,得到:

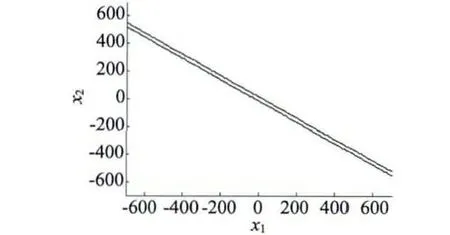
圖2 線性滑模面和飽和函數結合結果
從圖2 可以看出,當采用飽和函數削弱滑模變結構控制抖振時,狀態變量由于邊界層厚度的存在而不能收斂到零,而是收斂到零點的一個鄰域內,這就造成了最終的控制誤差。但是正是因為邊界層的存在使控制信號的光滑性變好,而且邊界層厚度越大,光滑性越好,削弱抖振的能力越強,所以削弱抖振和保證控制精度之間就存在著矛盾。當采用式(14)的非線性滑模面時,δ=20,此時:

從圖3 可以看出,當采用非線性滑模面時,在遠離原點處邊界層較厚,這有利于削弱抖振,而在原點附近邊界層較薄,這有利于保證最終的控制精度,所以采用非線性滑模面和飽和函數結合很好地解決了在削弱抖振和保證控制精度之間的矛盾。
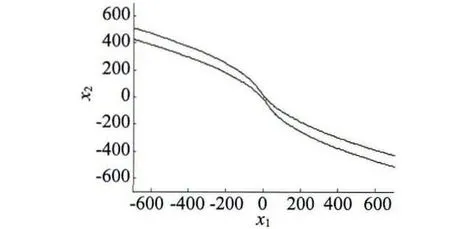
圖3 非線性滑模面和飽和函數結合
5 仿真及結果
在MATLAB/Simulink 中構建如圖1 所示的基于相鄰交叉耦合環形控制的四臺永磁同步電機的同步控制系統,對于單臺電機采用的控制方法如圖4 所示。其中PMSM 模塊的參數設定:Ra=2.875 8 Ω,p=4,Ld=Lq=8.5×10-3H,J=8.5×10-3kg·m2。
設定參考轉速v=700 r/min。
對單臺電機的控制,采用基于電壓空間矢量PWM(SVPWM)的id=0 的轉速和電流雙閉環控制,電流環的控制采用常規的PI 控制,控制框圖如圖4所示,其中控制器1 為跟蹤誤差控制器,控制器2、3為同步誤差控制器。
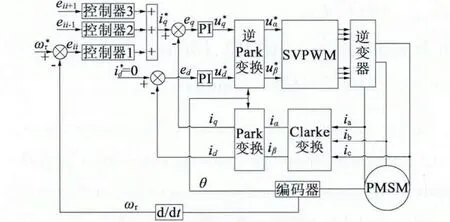
圖4 單臺電機的控制框圖
4 臺電機都不帶負載,跟蹤誤差控制器1 和同步誤差控制器2、3 都采用非線性滑模面變結構控制時穩定后的穩態誤差如圖5 中的A 線所示;當控制器1、2、3 都采用線性滑模面變結構控制時穩定后的穩態誤差如圖5 中的B 線所示;當控制器1、2、3 都采用PID 控制時穩定后的穩態誤差如圖5 中的C 線所示。
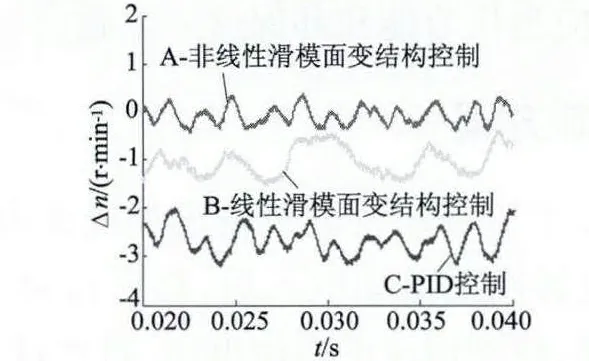
圖5 穩定時各種轉速同步控制方法的穩態誤差比較
從圖5 可以看出,在不帶負載的情況下采用基于非線性滑模面的滑模變結構控制的控制精度最高。PID 控制的控制精度最差。
在0.03 s 時四臺電機的參考轉速由原來的650 r/min 變為700 r/min。在0.05 s 時對電機2 加入負載1.5 N·m 作為外部干擾,采用三種控制方法的仿真結果如圖6 所示。
從圖6 可以看出,非線性滑模變結構控制在改變負載后同步精度最高,抖振最弱。把圖6 中非線性滑模變結構控制和PID 控制的0.05 ~0.058 s 放大,如圖7 所示。
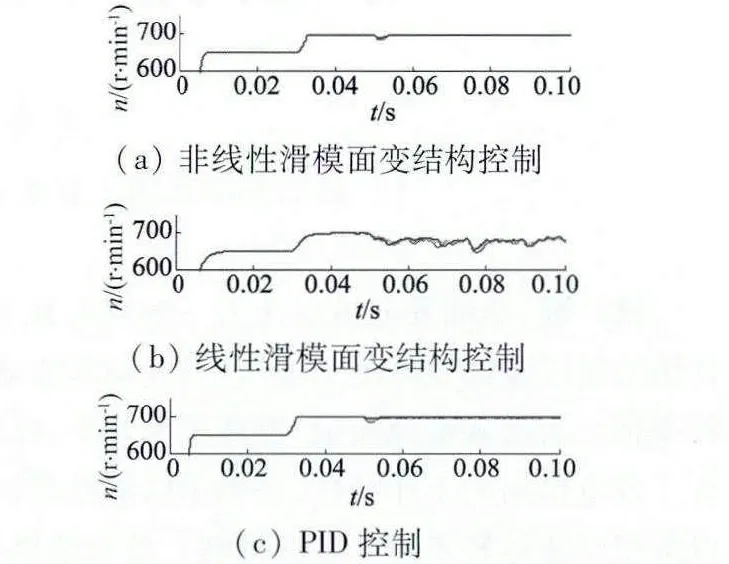
圖6 三種控制方法在改變轉速和負載的情況下仿真結果

圖7 帶負載時PID 控制和非線性滑模面滑模變結構控制轉速同步穩態比較
電機2 的負載改變時,根據圖1 可以看出,電機1 和電機3 的所處狀態相同,所以在圖7 中電機1和電機3 的轉速線完全重合。在圖7 中可以看出,在采用基于非線性滑模面的滑模變結構同步控制時在0.05 ~0.054 s 中四臺電機的速度相差最小,并且在0.054 s 后依然是基于非線性滑模面的滑模變結構同步控制的同步性能最好。
6 結 語
通過分析和仿真得出滑模變結構控制的滑模面為非線性時,采用飽和函數在削弱抖振的同時能夠較好地保證同步控制精度,這就解決了線性滑模面和飽和函數結合時保證控制精度和減弱抖振之間的矛盾。通過基于相鄰交叉耦合環形系統對四臺電機同步控制的仿真,以及和線性滑模面變結構控制、PID 控制的比較得出,非線性滑模面變結構控制的同步精度最高、抖振最弱,且控制的魯棒性能最強。
[1] 劉福才,張學蓮,劉立偉.多級電機傳動系統同步控制理論與應用研究[J].控制工程,2002,9(4):87-90.
[2] 崔皆凡,邢豐,趙楠,等.基于模糊控制器的改進耦合多電機同步控制[J].微電機,2011,44(3):75-77.
[3] 劉然,孫建忠,羅亞琴,等.基于環形耦合策略的多電機同步控制研究[J].控制與決策,2011,26(6):957-960.
[4] FRANCISCO J,MEMBER P P.Improvement of the electronic line-shafting[C]//IEEE 35th Annual of Power Electronics Specialists Conference,2004:3260-3265.
[5] 曹春平,王波,胥小勇,等.基于神經網絡多電機偏差耦合同步控制研究[J].控制工程,2013,20(3):415-418.
[6] 曹玲芝,李春文,牛超,等.基于相鄰交叉耦合的多感應電機滑模同步控制[J].電機與控制學報,2008,12(5):586-592.
[7] 李俊麗,何勇,王生澤. 單神經元PID 在多電機同步控制中的應用[J].機電工程,2010,27(8):14-18.
[8] 彭繼慎,韓彥春.基于模糊PI 雙模控制的永磁同步電機控制系統[J].現代電子技術,2008(23):177-180.
[9] 方斯琛,周波,黃佳佳,等. 滑模控制永磁同步電機調速系統[J].電工技術學報,2008,23(8):29-35.
[10] CHEN M S,HWANG Y R,TOMIZUKA M. A state-dependent boundary layer design for sliding mode control[J].IEEE Transactions on Automatic Control,2002,47(10):1677-1681.