基于模糊控制的溫濕度試驗系統的研究
2015-01-13 02:00:00王洪航褚建新張江明
化工自動化及儀表 2015年3期
王洪航 褚建新 張江明 孫 林
(上海海事大學航運技術與控制工程交通行業重點實驗室,上海 201306)
溫濕度試驗是將產品放置在人工設定的特定環境中對其性能進行評價的試驗[1],是新產品研制、樣機試驗和產品合格鑒定過程中必不可少的試驗階段。溫濕度試驗箱是模擬自然高低溫和濕度循環變換環境的裝置,在汽車制造業、電子儀表及材料等行業的溫濕度測試中發揮著重要作用。
溫濕度試驗箱的溫濕度控制是一種非線性、滯后和時變的復雜過程[2],且存在不確定干擾、控制對象無準確數學模型及溫濕度耦合等缺點。大多數溫濕度試驗箱使用傳統PID控制[1],但對于無法取得精確數學模型的系統,一般可采用模糊控制。文獻[2]采用了模糊控制,但很難解決溫濕度控制系統非線性、時變、魯棒性不強及溫濕度耦合等問題;文獻[3]中溫度和濕度各自獨立的使用單回路模糊控制方法,沒有考慮它們的耦合特性,也無法到達滿意的控制效果。另外,建立溫濕度試驗環境需要考慮諸多因素,如濕熱速率、凝露及濕熱場均勻性等,因此多因素條件下的溫濕度控制系統是一個多變量控制系統。筆者在傳統PID控制的基礎上,結合模糊自適應PID控制算法和模糊解耦算法設計了模糊溫濕度控制器。
溫濕度試驗箱主要由箱體、加熱系統、制冷系統、加濕除濕系統和檢測控制系統組成(圖1)。控制內容包括加熱量、制冷量、風量、加濕量和除濕量;檢測變量包括進風口溫度t1、進風口濕度h1、出風口溫度t2、出風口溫度h2和工件表面溫度t3。則平均溫度t平=(t1+t2)/2,平均濕度h平=(h1+h2)/2。
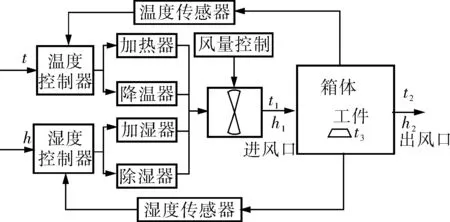
圖1 溫濕度試驗箱的組成簡圖
2 溫濕度控制算法
溫濕度試驗箱控制大多數采用傳統PID控制方案[4]。傳統控制系統的設計與分析是建立在已知系統精確數學模型的基礎上的,但實際系統具有復雜勝、非線性、時變性、不確定性及不完全性等,一般無法獲得精確的數學模型,因此為實現上升速度快、過渡時間短且超調小的目的,筆者采用了模糊自適應PID控制算法和模糊解耦算法。
溫濕度試驗箱的溫度和濕度模型可近似為一階滯后環節[5,6]:
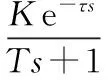
式中K——增益系數;
T——時間常數;
τ——系統延時常數。
根據經驗,T∈[20,150],τ∈[30,100][7]。
2.1 模糊自適應PID控制算法
模糊自適應PID控制器被設計為一個二維輸入、三維輸出的系統(圖2)。以溫度為例,第一個輸入是溫度偏差e(即tn-t0),其中,tn為第n次測量的試驗箱內實際溫度值,t0為設定值;第二個輸入是溫度偏差變化率ec(即de/dt)。3個輸出分別為 PID 的3個增益調節量ΔKp、ΔKi和ΔKd。
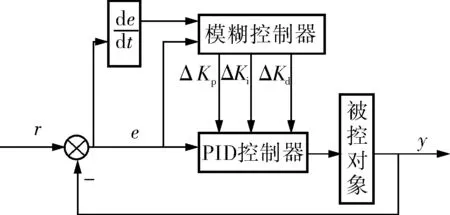
圖2 模糊自適應PID控制器系統示意圖
模糊自適應PID控制算法的思想是:找出PID的3個參數與偏差e、偏差變化率ec之間的模糊關系,通過不斷檢測e和ec,根據模糊控制規則
和原理對PID的3個參數進行在線整定,獲得新的Kp、Ki、Kd后,通過常規PID控制器對控制對象進行相應控制。PID 3個參數的整定公式為:
Kp=ΔKp+Kp0
Ki=ΔKi+Ki0
Kd=ΔKd+Kd0
{NB,NM,NS,ZO,PS,PM,PB}為模糊子集,其中元素分別代表{負大,負中,負小,零,正小,正中,正大}。偏差e和偏差變化率ec的論域為[-3,3],量化等級為{-3,-2,-1,0,1,2,3}。
模糊控制設計核心是根據技術知識和實際操作經驗[7],建立合適的模糊規則表(表1),得到針對ΔKp、ΔKi、ΔKd分別整定的模糊控制表[8]。
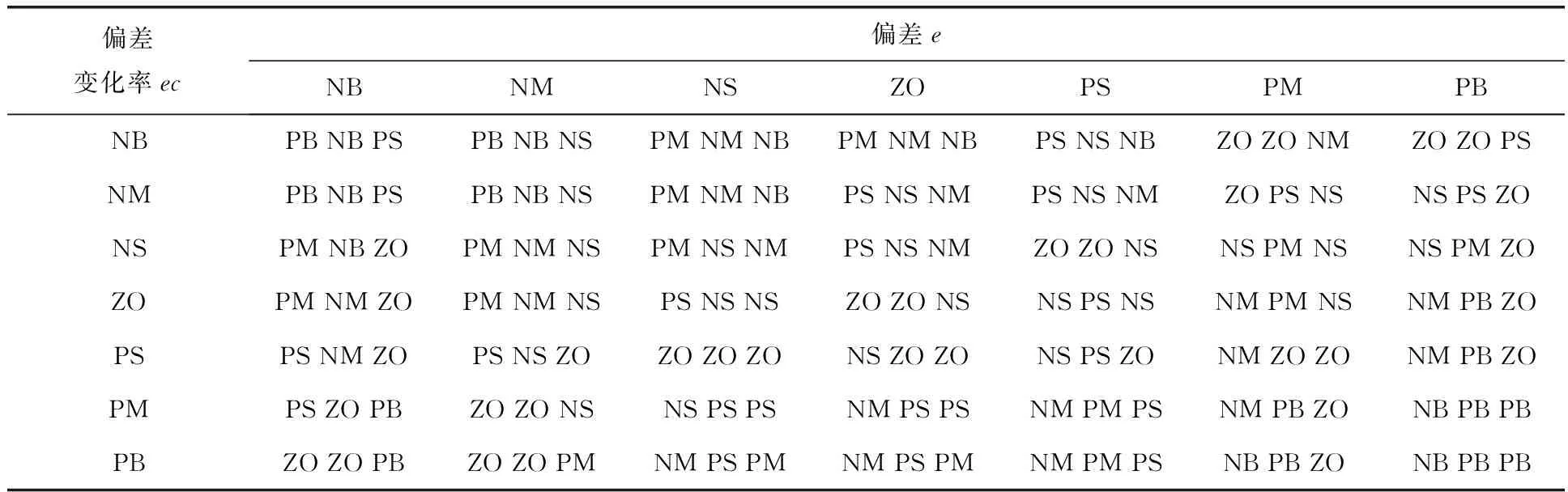
表1 模糊規則表(ΔKp、ΔKi、ΔKd)
2.2 模糊解耦算法
溫濕度的耦合關系是濕度對溫度的影響比較小,但溫度對濕度的影響很大。當溫度每變化1℃,相對濕度可能下降5%左右,且濕度變化比溫度變化慢,因此溫度對濕度的補償大。筆者采用基于模糊控制技術的智能解耦方法[8],通過串聯模糊解耦補償器對模糊系統進行解耦(圖3)。
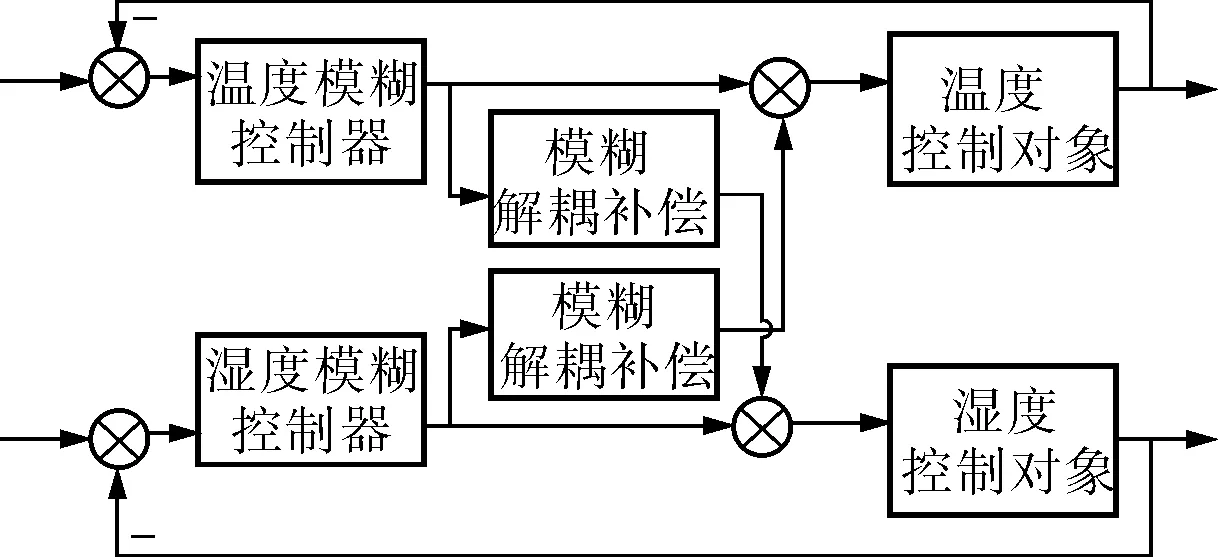
圖3 模糊解耦補償解耦
圖3中模糊控制器包括兩個類似的模糊控制器。以溫度為例,此處采用一維模糊控制器[9],Ke為量化因子,Ku為比例因子。設Ct為溫度控制器的輸出,Cth為溫度模糊控制輸出對濕度控制的模糊補償。Cth論域范圍為{-3,-2,-1,0,1,2,3}。根據試驗經驗和試驗測試得到模糊補償控制規則表(表2)。

表2 模糊補償控制規則表
3 仿真試驗
假設溫濕度試驗箱的廣義溫度對象為一階時滯環節[10,11],系統延時常數τ=80,時間常數T=60,增益系數K=1。廣義濕度對象的模型參數為:純滯后τ=50,時間常數T=50,增益系數K=4。對筆者采用的模糊解耦和模糊自適應PID控制算法進行Matlab仿真,得到的溫度輸出響應曲線如圖4~6所示。
從圖4~6可以看出:筆者所設計的自適應模糊PID控制器在控制過程中,系統的響應速度快,調節精度高,穩態性能好,克服了傳統PID控制超調大且響應周期長的缺點,還可以節約能耗。
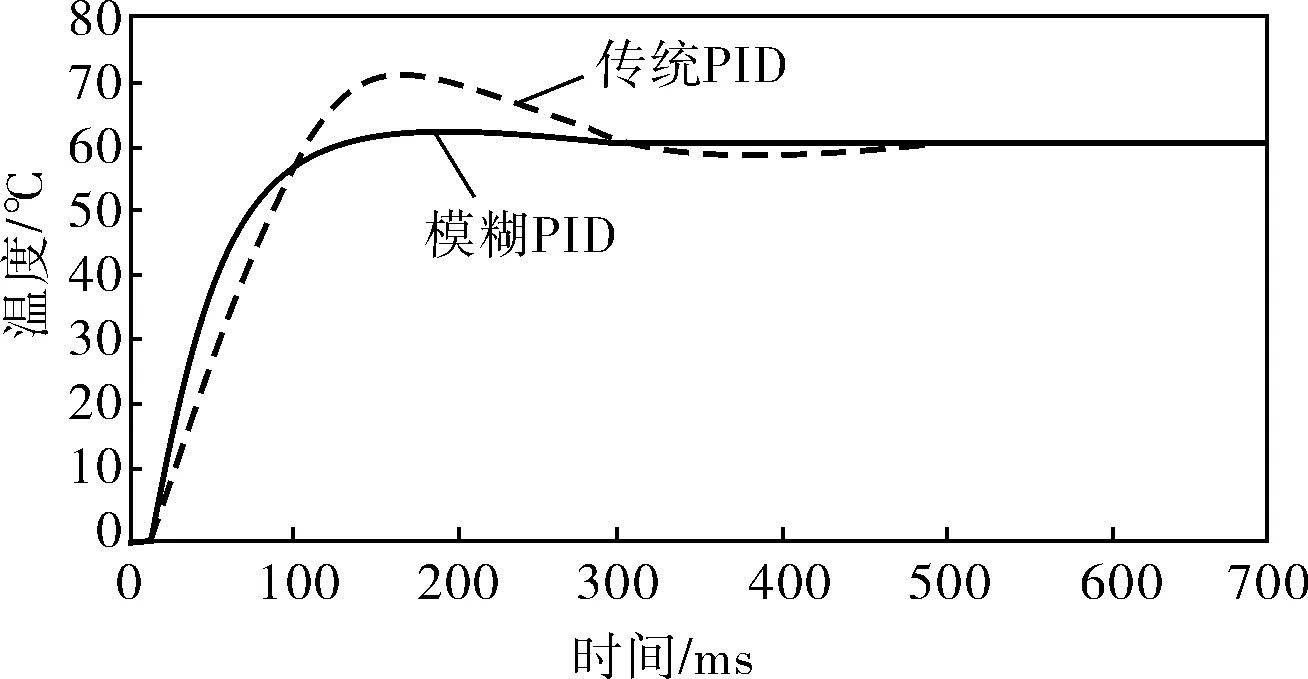
圖4 溫度輸出響應曲線
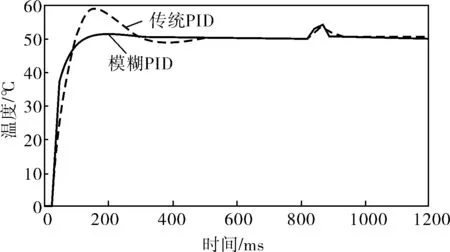
圖5 加擾動的溫度輸出曲線
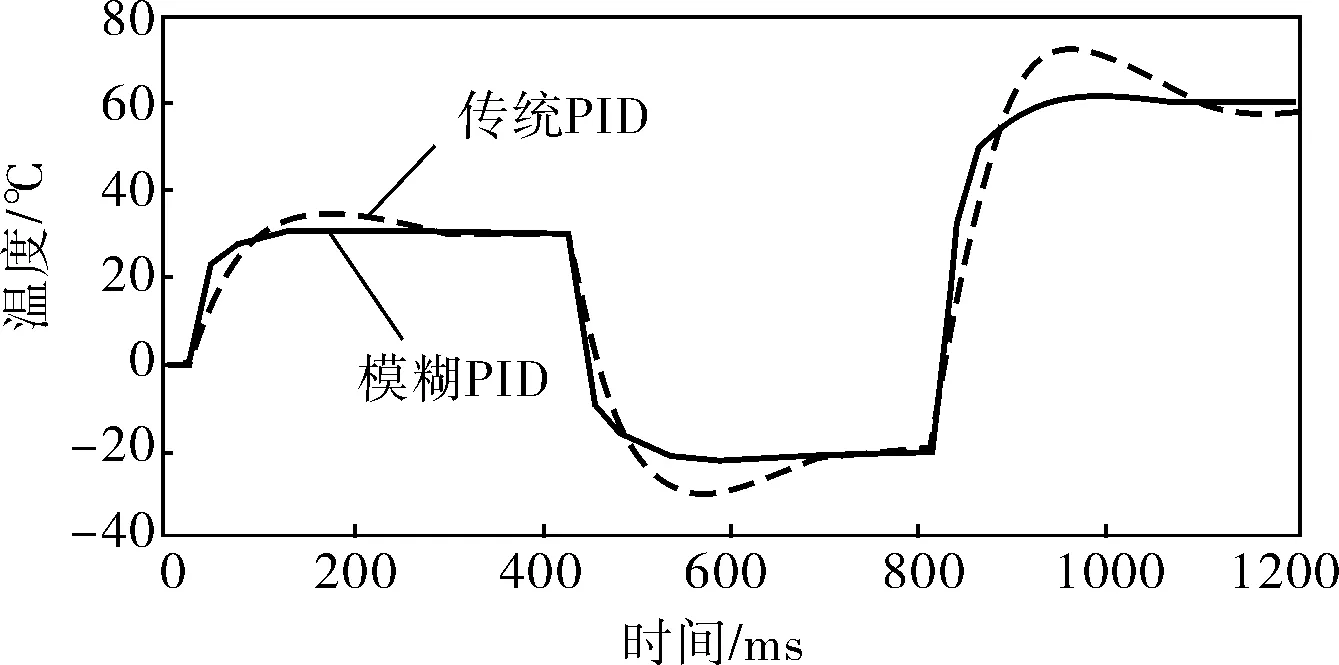
圖6 溫度交替變化的輸出曲線
4 結束語
筆者在傳統PID控制的基礎上,結合基于模糊解耦補償算法和模糊自適應PID控制算法設計了模糊溫濕度控制器,相對現用的溫濕度試驗箱控制方法,此溫濕度控制方案精度高、響應快、超調小、節約能耗,且系統開發和維護非常方便,性價比高,在實用中有很多優越性。
[1] 沈榮林.恒溫恒濕箱的溫濕度調節方法[J]. 環境技術,1994,(1):42~44.
[2] 吳志勇,畢德純.溫濕試驗箱發展綜述[J]. 裝備環境工程,2009,6(5):63~67.
[3] 殷云華,樊水康,陳閩鄂.自適應模糊PID控制器的設計和仿真[J].火力與指揮控制,2008,33(7):96~99.
[4] 劉金琨.先進PID控制MATLAB仿真[M].北京:電子工業出版社,2004:94~146.
[5] 黃力櫟,胡斌,羅昕.溫濕度解耦模糊控制系統的研究[J].農機化研究,2010,(2):56~59.
[6] 彭勇剛,韋巍.人工氣候箱溫濕度模糊控制[J].農業工程學報,2006,22(8):166~169.
[7] 劉東文.嵌入式溫濕度控制器的研究與設計[D].貴州:貴州大學,2008.
[8] 欒瑞.無線溫濕度監測系統的設計[D].吉林:吉林大學,2013.
[9] 肖世海.基于ARM的溫濕度控制器的設計[D].杭州:浙江大學,2007.
[10] 顧德英,羅云林,馬淑華.計算機控制技術[M].北京:北京郵電大學出版社,2007:22~25.
[11] Taira U.Energy Saving Type Temperature-Humidity Simultaneous Control Method[C].SICE 2004 Annual Conference .Sapporo: IEEE, 2004: 2640~2643.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
