混沌優化反饋校正串級控制
2015-01-15 00:32:12李青芮
化工自動化及儀表 2015年2期
李青芮 李 平 張 鵬
(1. 西北工業大學自動化學院,西安 710072;2.遼寧石油化工大學信息與控制工程學院,遼寧 撫順 113001)
在復雜工業過程控制中,串級控制系統利用率非常高,因此建立一個較好的串級控制系統十分重要。串級控制系統具有改善過程的動態特性、提高系統控制質量、迅速克服進入副回路的二次擾動、提高系統工作頻率及對負荷變化的適應性較強等特點。串級控制方法成功使用在液壓仿真轉臺和cvT速比控制系統中[1,2],但是其算法非常復雜,不容易操作。專家PID的控制方法成功應用在主汽溫控制系統中[3~5],但此方法參數的選取極其復雜。
筆者提出一種基于混沌優化的反饋校正控制方法,首先通過混沌映射的方法對副回路進行數學辨識,得到其傳遞函數后依據辨識出的數學模型進行離線PID參數優化,確定副回路控制器后,對整個被控對象進行傳遞函數辨識,最后依據被辨識出的傳遞函數構造控制器對被控對象進行控制。以某主汽溫控制系統為被控對象進行仿真研究,仿真結果表明該方法具有較好的控制效果。該方法的優點在于一切參數自動優化,魯棒性能高,可以承受模型時間常數±25%和增益±40%的變化而不失去控制能力。
1 控制方法基本原理①
1.1 混沌映射
生態學中的蟲口模型(即Logistic映射)如下:
Xn+1=uXn(1-Xn),n=1,2,3,…
(1)
其中Xn∈(0,1)。當u=4時,將發生混沌映射,只要n取一定的數值,Xn會遍歷0~1之間的幾乎每一個值。利用此性質就可以將任意一個變量映射到一定的域內,遍歷此域內的每一個值從而進行全局搜索[6]。
1.2 系統反饋校正方法
控制器的設計基于被控對象的數學模型,首先假設被控對象的開環傳遞函數為:

(2)
其中K是系統增益,Tn是系統時間常數。
將所期望的系統閉環傳遞函數規定為如下形式:
(3)
其中T為可調參數,隨著T變大,閉環響應速度變慢;T變小,閉環響應速度變快。因此,控制器的傳遞函數可由下式來表示:

(4)
控制器的輸入輸出關系為:

(5)
其中e(s)是系統反饋與目標值的誤差。
根據式(5)構造控制器。
1.3 控制器參數優化方法
控制器參數優化分為4步:
a. 利用混沌映射對系統副回路進行數學辨識,流程如圖1a所示;
b. 利用混沌映射對系統副回路PID控制器參數進行整定,流程如圖1b所示;
c. 將步驟b得到的PID參數代入模型,利用步驟a的方法辨識整個被控對象的傳遞函數;
d. 采用系統校正方法設計控制器對被控對象進行控制。
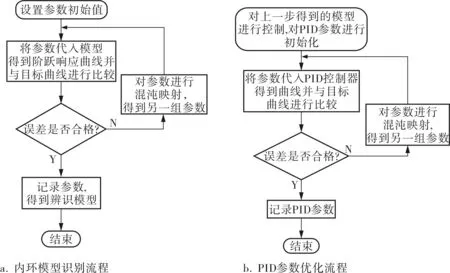
圖1 控制器參數優化相關流程
2 仿真研究
對某主汽溫控制系統進行仿真研究[7],其內環傳遞函數為:

(6)
外環傳遞函數為:
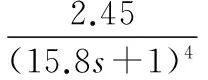
(7)
2.1 內環模型混沌識別
首先對內環系統的階躍響應曲線進行模型識別,得到的曲線如圖2所示,圖中兩根曲線的相似度極高,其中實線為目標曲線,虛線為辨識得到的曲線,得到模型傳遞函數如下:
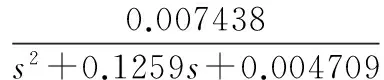
(8)
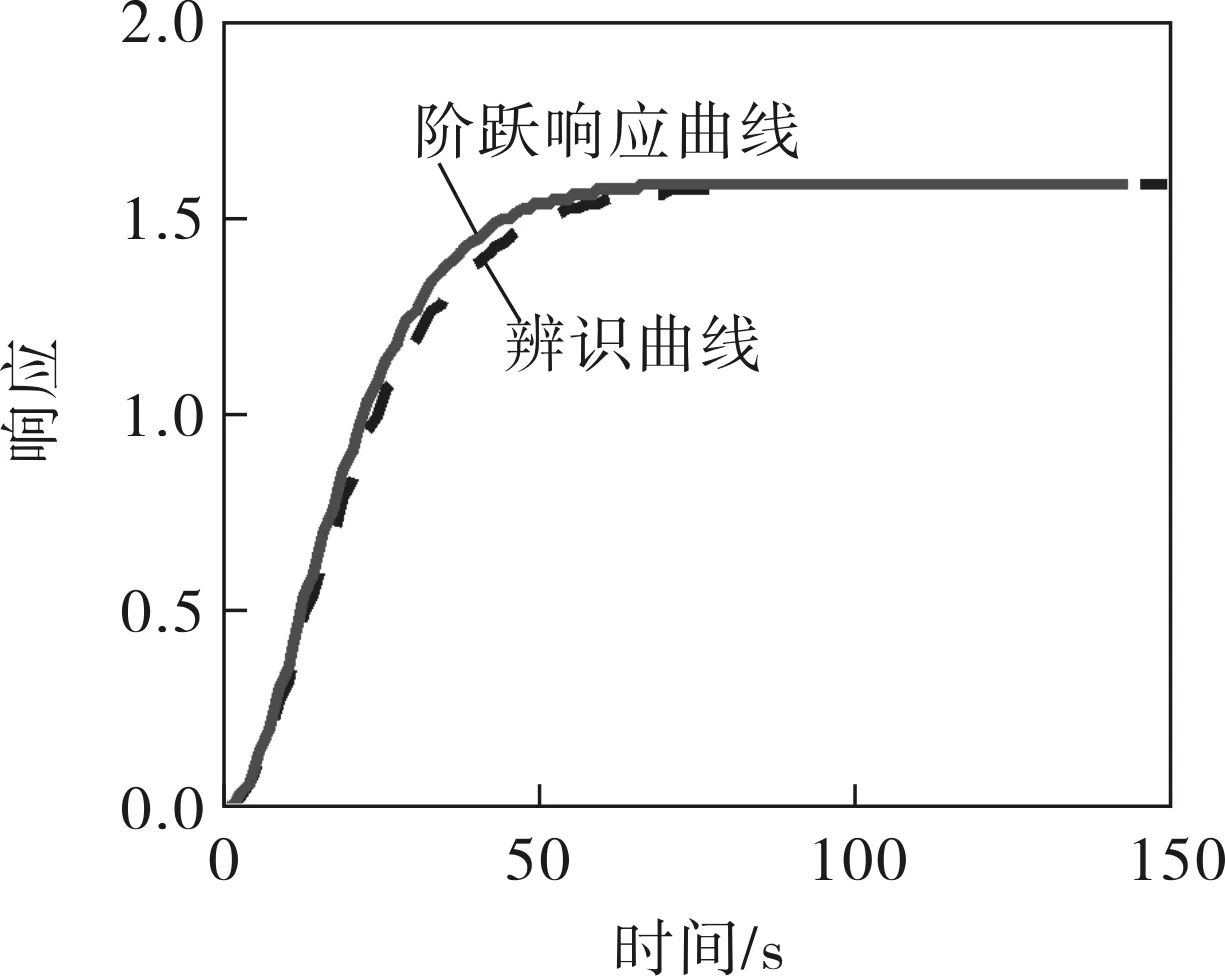
圖2 內環模型的階躍響應曲線與辨識曲線
2.2 PID參數優化
對得到的W2(s)傳遞函數進行PID控制,并對其參數進行優化,設置其目標閉環傳遞函數如下:
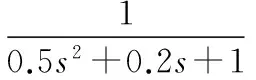
(9)
優化后得到的辨識曲線與目標曲線如圖3所示。
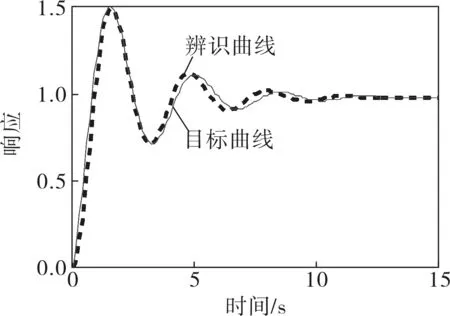
圖3 內環PID目標曲線與辨識曲線
優化得到的PID參數為:P=227.8,I=4.2652,D=35.432。
2.3 識別整體模型
對內環采用上述參數的模型進行整體識別,結果如圖4所示。在圖4中階躍響應曲線與辨識曲線重疊,說明相似度極高。
識別出來的模型為:

(10)
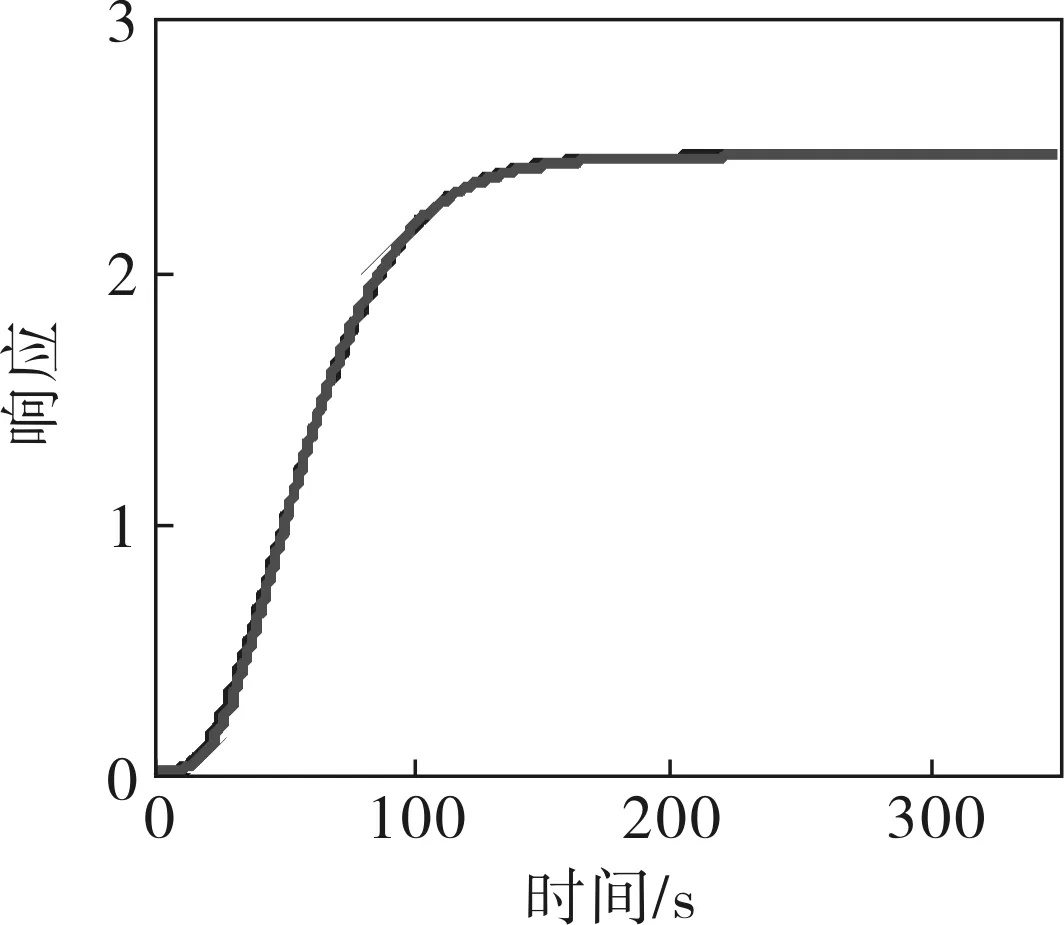
圖4 被控對象階躍響應曲線與辨識曲線
2.4 控制系統抗干擾能力研究
根據2.3節中辨識出的模型所設計的控制器如圖5所示。
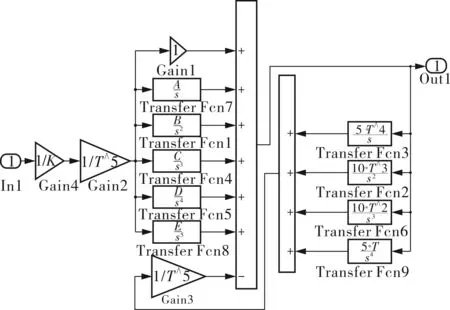
圖5 系統反饋校正控制器
識別出來的模型為:
其中,A=0.46326,B=0.083566,C=0.0072849,D=0.00030375,E=0.0000047706,K=0.000011688,T=10。
T為可調參數,A、B、C、D、E為識別出來的系統參數(同1.2節中的Tn,n=1,2,3,4,5)。使用此控制器對系統進行仿真,得到的系統階躍響應曲線如圖6所示,在100s時系統達到穩定沒有超調。在串級控制系統中,內擾對系統的影響并不是很大,對系統的品質基本不會造成不良影響,同時系統還具有很好的抗外干擾的能力。為了驗證系統對外部干擾的適應能力,在系統輸出穩定后200s時,對系統輸出加入20%的擾動,系統的響應如圖6所示,從曲線可以看出系統的抗外部干擾能力非常強,大約在270s就恢復正常。
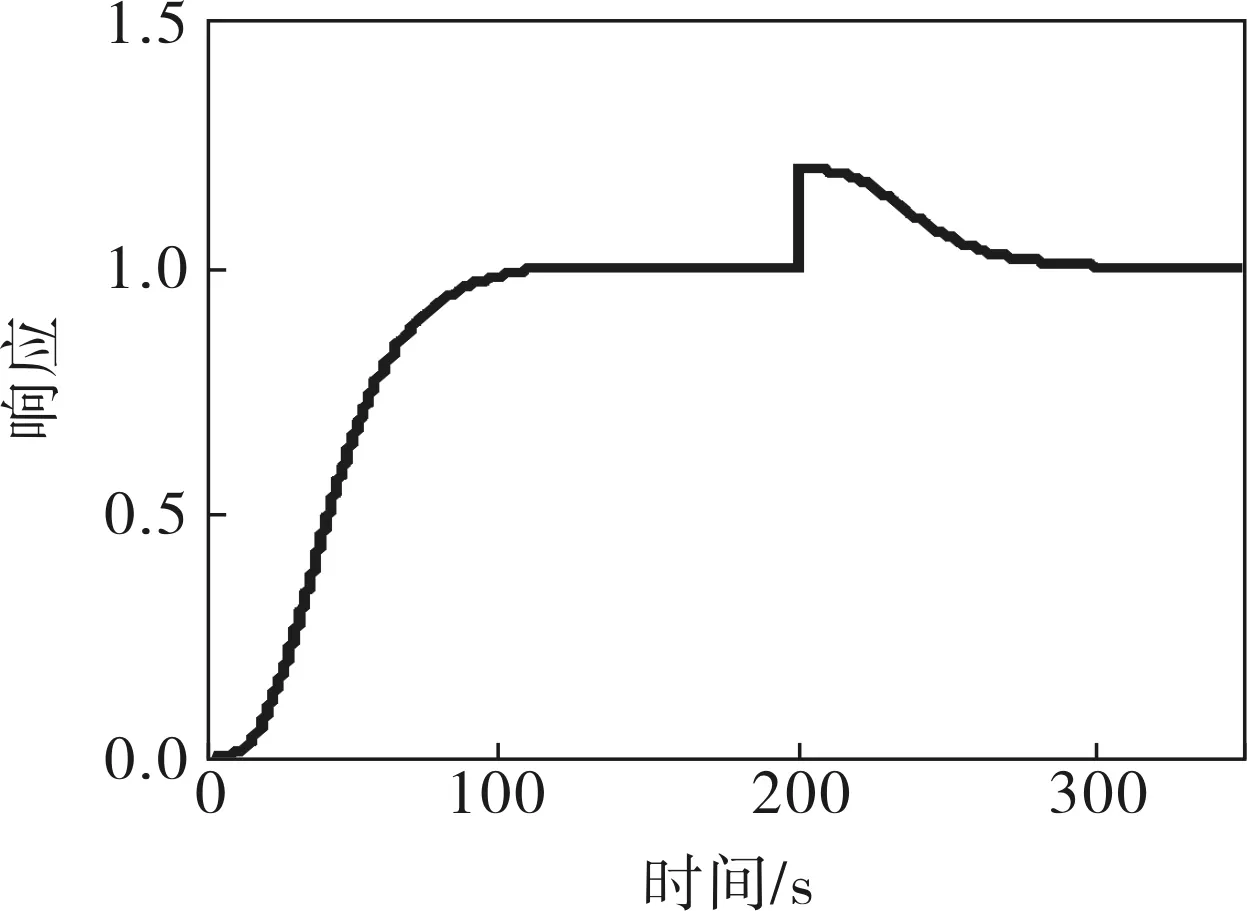
圖6 系統階躍響應及其抗干擾響應
2.5 對象參數變化下控制系統的魯棒性
隨著季節、天氣、工作負荷和工況的變化,被控對象的時間常數和增益都在變化,因此一個具有強魯棒性的控制器非常必要。
為檢驗控制器的魯棒性,分別對系統的時間常數和增益進行改變,然后觀察系統的適應能力。首先調節對象增益K,由2.45變化到1.45和3.45,控制系統的動態響應曲線如圖7a所示。K值增大時,系統響應變快,超調量增大;K值減小時,系統響應速度變慢。此次系統增益改變分別達到±40%,表明系統對增益變化的魯棒性較好。
當對象時間常數T由15.8變化到11.8和19.8時,控制系統的動態響應曲線如圖7b所示。T值增大時,系統超調增大,反應時間變長;T值減小時,系統在上升過程中伴有小幅振蕩。系統時間常數改變分別達到±25%,表明系統對時間常數改變的魯棒性非常好。

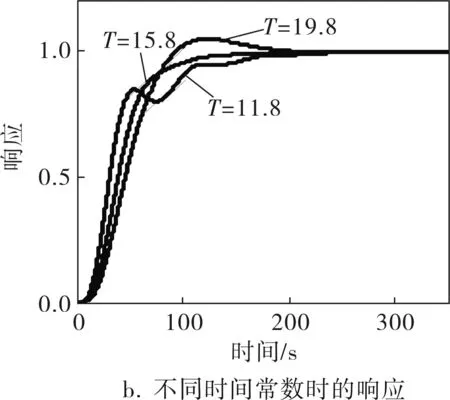
圖7 系統響應曲線
從仿真結果可以看出,基于混沌優化的反饋校正串級控制系統具有較強的魯棒性,特別是對對象增益的變化具有很強的魯棒性。
3 結束語
針對有明顯滯后的工業系統,提出混沌優化反饋校正方法,給出了控制器結構和控制器參數優化方法。該方法控制結構簡單、可調參數少,而且參數有物理意義,便于參數的整定。通過仿真,表明控制器具有良好的跟蹤性能和抗干擾性能,魯棒穩定性能也較好,具有實際應用意義。
[1] 郭敬,趙克定,郭治富.液壓仿真轉臺的PFC-PID串級控制[J].航空學報,2008,29(5):1395~1400.
[2] 劉金剛,周云山,鄒乃威,等.DMC-PID串級控制在cvT速比控制系統中的應用[J].湖南大學學報(自然科學版),2007,34(7):44~48.
[3] 王志萍,彭道剛,楊平,等.專家PID控制在主汽溫控制系統中的應用[J].現代電力,2004,21(4):58~61.
[4] Yin C Q,Hui H Z.Cascade Control Based on Minimum Sensitivity in Outer Loop for Processes with Time Delay[J].Journal of Central South University,2012,(9):2689~2696.
[5] Duan H D,Tian Y T,Yang M.Cascade Control with Low Order Active Disturbance Rejection Controller for Higher Order Nonlinear Cascade System[C].Proceedings of 2009 IEEE International Conference on Intelligent Computing and Intelligent Systems.Shanghai:IEEE,2009,(2):241~245.
[6] 侯威,封國林,董文杰.基于復雜度分析logistic映射和Lorenz模型的研究[J].物理學報,2005,54(8):3940~3945.
[7] 王國玉,韓璞,王東風,等.PFC-PID串級控制在主汽溫控制系統中的應用研究[J].中國電機工程學報,2002,22(12):50~55.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24