機器人使生產更快速、高效
——貝加萊將機器人技術無縫集成到自動化世界中
2015-01-16 09:07:22貝加萊工業自動化中國有限公司
自動化博覽 2015年9期
關鍵詞:設計
貝加萊工業自動化(中國)有限公司
機器人使生產更快速、高效
——貝加萊將機器人技術無縫集成到自動化世界中
貝加萊工業自動化(中國)有限公司
1 引言
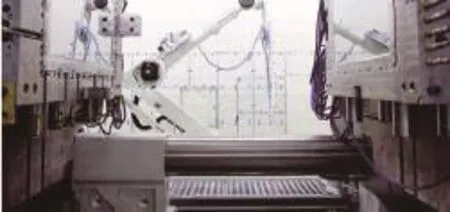
現在,越來越多的生產步驟被集成到塑料加工機械中。對于集成物料搬運和內部物流任務而言,機器人是可行的解決方案。由于典型的塑料加工要求循環周期很快,因此人類和機器人之間的協作必須完全同步并無縫集成。貝加萊已經將機器人技術無縫集成到自動化世界中,這樣可以確保機器制造商最大限度地提高開發過程中的效率。
每年,歐盟加工約4500萬噸塑料,這相當于約30%的鋼材消耗量。各種成型工藝被用來將塑料熔體或粉末加工成固體產品。其中一種方法是注塑成型,它是將塑料融化,注射入模具然后壓縮成型。即使高度復雜的部件也可以通過這種完全自動化的技術實現批量生產。
塑料加工機械制造商在提高其設備生產率方面不遺余力。一種普遍的做法是將越來越多的功能打包到每一臺機器中,從而確保不間斷生產,最終形成一個全自動化的生產過程。
2 機器人是提高生產效率的關鍵
機器人可以有效提高生產效率,所以,物料搬運設備和機器人正在承擔越來越多的任務。
· 將金屬嵌件固定在模具中待塑料包緊;
· 應用彈性體將硬質塑料部件密封;
· 將部件從模具中取出;
· 將部件輸送至后續裝配或包裝站。
由于典型的塑料加工要求循環周期很快,因此機器人必須與機器的其它部分之間實現完美協調,從而確保動作精確同步。開模時間極短,但足以嵌入待包緊的金屬件或取出成品件,因此機器人必須在一開模就能伸入模具。
為了盡量減少循環周期,機器人動作與注射裝置動作必須完美協調。機器人與頂出裝置之間的握手通信允許在不放緩循環周期的情況下取出部件。
3 集成解決方案節省時間和成本
塑料加工機械實現同步生產要求快速的數據通信。貝加萊通過采用實時Ethernet POWERLINK協議連接所有外圍設備解決了這一問題。

圖1 同步過程依賴于快速的數據通信,貝加萊通過采用實時Ethernet POWERLINK協議連接所有外圍設備。
為了以必要的速度協調動作,所涉及到的各個軸必須實現高度同步。傳統方案中,各個動作分別由PLC、CNC和機器人控制器控制,幾乎不適合處理集成傳感器、執行機構和機器人的大量軸的情況。即使可以處理,各種硬件組件也會使該方案變得非常昂貴。
處理這些需求最有效的方式是使用貝加萊的集成自動化解決方案。貝加萊方案覆蓋了整個加工鏈,可以對所有生產過程和動作進行統一控制,HMI和安全技術亦包含在同一個項目中。
同步過程依賴于快速的數據通信,貝加萊通過采用實時Ethernet POWERLINK協議連接所有外圍設備以及智能驅動設備。
貝加萊的驅動組件可以輕松處理各種軸,即使在復雜的運動系統中也能提供微秒級同步,從而無需使用單獨的機器人控制器,節省了相關硬件和培訓成本。
4 掌控復雜任務
Automation Studio為機器自動化的各個方面提供了統一的軟件環境:從HMI和PLC技術到運動控制、CNC和機器人技術。這使機器制造商可以根據需要處理加工、定位和可視化任務,并且毫不費力地保持它們之間的完全同步。即使是非常復雜的任務也可以在單個PLC上被快速執行。Automation Studio是一款能夠滿足任意要求的集成自動化軟件。

圖2 貝加萊采用獨立于現場總線的openSAFETY協議用于安全功能如工具中心點安全限速(SLS@TCP)。openSAFETY允許用戶自由選擇最能滿足他們應用需求的驅動技術。
與此同時,貝加萊的開發環境可以使整個開發過程受益。機器軟件可以被劃分開來由多個團隊并行開發。一個整體復雜的程序可以被劃分成數個模塊,例如一個模塊代表主設備,而另一個模塊代表取走成品件的機器人。工程團隊并行工作可以大幅減少開發時間,使塑料加工機械制造商緊隨日益多樣化和定制化的行業發展趨勢。
硬件在環仿真允許開發者在無需制造樣機的情況下就機器性能對代碼效果進行測試。即使將第三方供應商的可選機器組件連接至整個系統,包括相應軟件,也就像把打印機連至商用PC一樣簡單。
貝加萊軟件開發環境中的語言解釋器可以使機器制造商更輕松地將機器人集成到他們的機器設計中。這使現有程序,例如來自較早實施的帶專用控制器的機器人系統,可以被重復使用。機器軟件開發人員可以使用結構化文本對機器人應用進行編程。
5 經TüV認證的工具中心點安全
Automation Studio可以為高效而可靠的安全控制程序開發提供一系列參數和功能塊,包括經TüV認證的SafeROBOTICS模塊,它可以被用來監控機器人運動系統中的工具中心點安全限速(SLS@TCP)功能。
貝加萊集成SafeMC運動控制方案的伺服技術可以在接收安全數據的同時直接在驅動器中執行安全功能。ACOPOSmulti伺服驅動器的錯誤檢測和響應時間為7毫秒,約是繼電器安全電路的十分之一。這樣就使停車距離縮短了100倍,因此單單減少機器占地面積就是一項顯著的優勢。
6 支持所需語言
貝加萊軟件開發環境中的語言解釋器可以使機器制造商更輕松地將機器人集成到他們的機器設計中。這使現有程序,例如來自較早實施的帶專用控制器的機器人系統,可以被重復使用。機器軟件開發人員可以使用結構化文本對機器人應用進行編程。
憑借豐富的機器人動作及整個機器配置選項,例如通過修改機器人加速度和運動曲線,塑料加工機械制造商能夠為其客戶提供全新的工具直接處理他們的生產流程。這樣可以為優化能效和速度或適應各種機械手配置操作模式,無需編程。
圖4 用戶界面
5 結語
本文程序基本滿足了道路照明設計中常用到的計算。利用計算程序尋找最優參數組合,省去了繁瑣的試探性計算,提高了工作效率。照明設計參數具有明確的規范要求,但符合規范的參數組合不止一組,對于最優參數組合的篩選并沒有統一的標準。因此,本文的程序設計除了在用戶界面給出一組參數組合外,還將大量符合規范的參數組合進行了保存,便于用戶進行自主篩選。另外,主程序設置了自主優化設計模塊,可由用戶自行設定參數,進行計算。
本文程序依然存在很多可以改進的地方,例如,程序設計中,除了高壓鈉燈外,可以增加其他光源種類;在電纜的選擇方面,除銅電纜外,可增加鋁芯電纜,并由用戶進行選擇。因此,主程序采用模塊化結構,所有功能都通過調用子程序實現,可以方便地對程序進行改進和擴展。
[1] 高杰. 天津市志成道立交橋區高桿照明設計[J]. 照明工程學報, 2014,25(1):59 - 61.
[2] 姚家袆. 照明設計手冊[M]. 北京: 中國電力出版社, 2006.
[3] 吳俊勇. 電力系統分析[M]. 北京: 北京交通大學出版社, 2012, 3
[4] 任元會. 工業與民用配電設計手冊[M]. 北京: 中國電力出版社, 2015, 10.
于濤(1987-),男,助理工程師,碩士研究生,現就職于天津市市政工程設計研究院,從事市政行業電氣及自動化設計及研究工作。
張泳(1971-),男,正高級工程師,碩士研究生,現就職于天津市市政工程設計研究院,從事市政行業電氣及自動化設計及研究工作。
高杰(1984-),男,天津人,工程師,碩士研究生,現就職于天津市市政工程設計研究院,從事市政行業電氣及自動化設計及研究工作。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
