飛機高壓直流電源系統的設計與仿真
2015-01-17 05:47:00盛正印
電子設計工程 2015年2期
李 運, 李 巖, 盛正印
(1.海軍航空工程學院 控制工程系,山東 煙臺 264001;2.91685部隊 海南 樂東 572528)
自從供電飛行開始,飛機供電要求穩定地增長,包括安裝重量、體積、環境、可靠性、維修性、配電結構、效率和擁有成本等因素多年來在飛機的電氣系統選擇中占據各種不同的位置。低壓直流電源是飛機最早采用的電源,它的主要優點是簡單可靠。但隨著飛機的發展,用電設備的增加,電源容量加大后,飛機直流電網的質量也顯著增加。為了改善低壓帶來的問題,迫切需要提高電源電壓。但由于當時直流發電機高壓滅弧和換向兩大問題,飛機電源系統并沒有直接進入高壓直流電源時代,而是先后進入恒速恒頻電源時代和變速恒頻電源時代[1]。隨著多電飛機和全電飛機技術的不斷發展,以往的低壓直流,恒速恒頻和變速恒頻發電系統在可靠性、安全性、發電機大容量、高功率密度以及安裝重量和體積等重要指標上已無法滿足飛機總體要求。基于此,設計了以下高壓直流電源系統,該系統可以滿足以上要求。
1 高壓直流電源系統設計方案
所設計的高壓直流電源系統由飛機發動機直接驅動的永磁同步發電機、PWM整流器以及控制器組成,系統原理框圖如圖1所示。
1.1 永磁同步發電機
選擇永磁同步發電機的理由如下[2]:

圖1 高壓直流電源系統原理框圖Fig.1 Functional block diagram of high voltage direct current power system
1)永磁同步發電機結構簡單,可靠性高,維護方便。
2)由稀土永磁材料制成的永磁同步發電機具有很高的功率密度,轉子直徑可以做得很小,從而減小電機的體積和重量,這對于飛機上寶貴的空間來說很有必要。
3)稀土永磁同步發電機由于轉子上無勵磁繞組,沒有勵磁損耗和電刷滑環間的摩擦、接觸損耗,從而具有很高的效率。
1.2 PWM整流器
目前在各個領域實際應用的整流電路幾乎都是晶閘管相控整流電路或者二極管整流電路,晶閘管相控整流電路的輸入電流滯后于電壓,其滯后角隨著觸發延遲角的增大而增大,位移因數也隨之降低。同時,輸入電流中諧波分量也相當大,因此功率因數很低。二極管整流電路雖然位移因數接近1,但輸入電流中諧波分量很大,所以功率因數也很低。隨著用電設備諧波標準日益嚴格,采用高功率因數、低諧波的高頻開關模式PWM整流器,替代傳統的二極管不控整流和晶閘管相控整流裝置是大勢所趨。通過對PWM整流電路的適當控制,可以使其輸入電流非常接近正弦波,還可以把交流輸入電流的功率因數控制為任意值。此外,PWM整流和傳統相控整流器相比較,體積和重量可以大大地減少,動態響應速度顯著提高[3]。鑒于以上考慮,選擇PWM整流。
1.3 控制器
控制器是一個雙閉環控制系統。外環是直流電壓控制環,直流電壓給定信號和實際的直流電壓比較后送入PI調節器,調節器的輸出為直流電流指令信號,該信號的大小和整流器輸入電流的幅值成正比。穩態時,實際直流電壓等于給定直流電壓,PI調節器輸入為零,輸出和整流器負載電流大小相對應,也和整流器交流輸入電流的幅值相對應。當負載電流增大時,直流側電容C放電而使其電壓下降,PI調節器的輸入端出現偏差,使其輸出直流電流增大,從而使整流器交流輸入電流增大,也使直流側電壓回升。達到穩態時,實際電壓仍和給定電壓相等,PI調節器輸入仍恢復到零,而直流電流則穩定在新的較大的值,與較大的負載電流和較大的交流輸入電流相對應。當負載電流減小時,調節過程和上述過程相反。內環是交流電流控制環,電流跟蹤控制方法一般采用電流滯環比較方式。外環PI調節器的輸出為直流電流信號,該信號分別乘以和三相相電壓同相位的正弦信號,就得到三相交流電流的正弦指令信號。該指令信號與實際交流電流信號比較后,通過對PWM整流器各開關器件進行控制,便可使實際交流輸入電流跟蹤指令值,跟蹤誤差由滯環寬度決定[4]。
2 系統數學模型和仿真模型
2.1 永磁同步發電機的數學模型
在dq軸系下,永磁同步發電機的數學關系式為[5]:
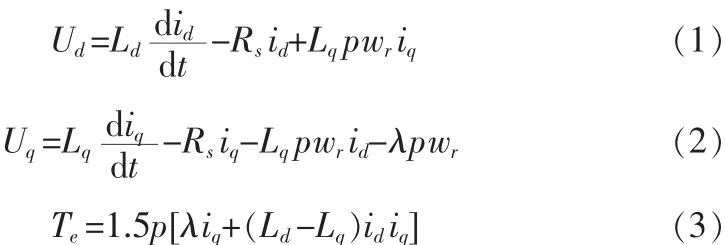
其中:Ld、Lq分別為 d 軸、q軸電樞電感;Rs為一相繞組的電樞電阻;id、iq分別為 d 軸、q 軸電樞電流;Ud、Uq分別為 d軸、q軸電壓;wr為轉子角速度;λ為轉子永磁鐵在定子中產生的感應磁通(假定為正弦分布)的幅值;p為電機的極對數;Te為電機的電磁轉矩。
2.2 系統仿真模型
根據永磁同步發電機數學模型、PWM整流器模型以及控制器模型建立高壓直流電源系統的仿真模型如圖2所示[6]。
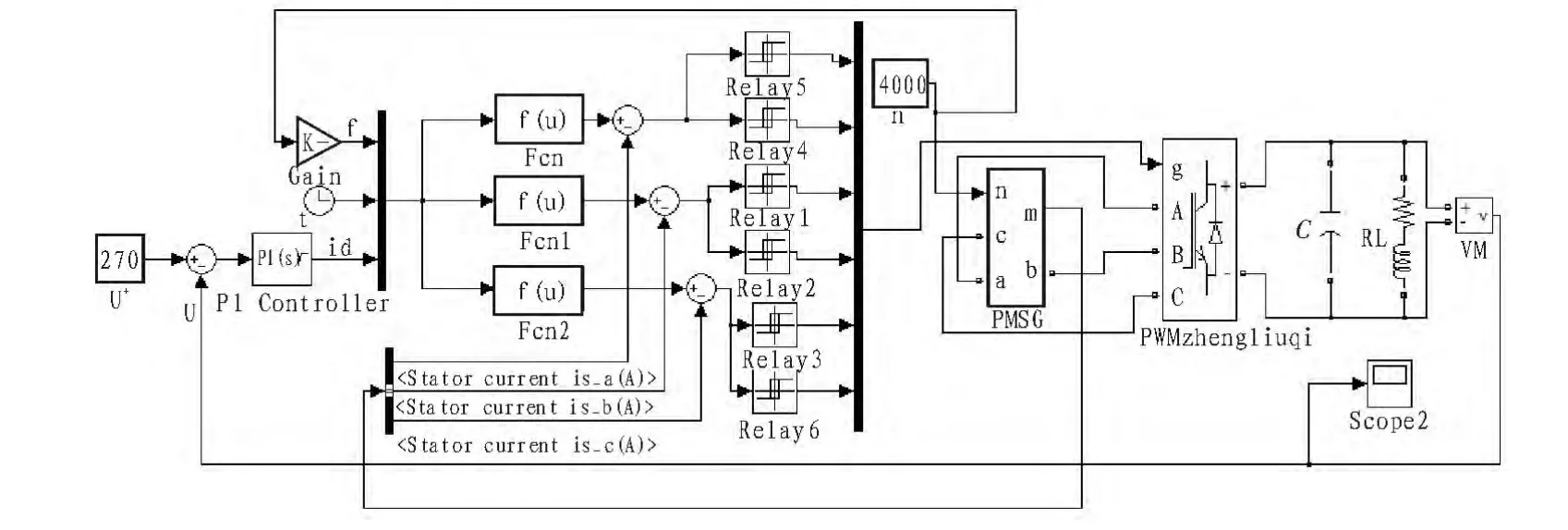
圖2 高壓直流電源系統仿真模型Fig.2 Simulation model of high voltage direct current power system
3 仿真結果
合理設置相應的參數,仿真運行,得到各種工作情況下的仿真數據。
3.1 負載一定,轉速改變時輸出電壓與輸入電流的變化情況
負載保持不變,轉速分別取4 000 r/min,10 000 r/min時,負載端輸出電壓的變化情況分別如圖3,4所示,穩態時a相輸入電流的局部情況分別如圖5,6所示。
由圖3,4可知,轉速改變時輸出電壓都可以快速達到并穩定在270 V左右。不同轉速時,達到要求穩定電壓的時間不同,轉速越大,達到要求穩定電壓的時間越短。這是因為,在不加調節的情況下,對于同一負載,系統達到穩態的時間一樣,但穩態值不同,轉速越大,穩態值越大。當需要調節到同一個穩定值時,轉速越大,所需時間越短。

圖3 轉速為4 000 r/min時輸出電壓的變化情況Fig.3 Situation change of output voltage while rotate speed is 4 000 r/min

圖5 轉速為4 000 r/min時穩定局部電流的變化情況Fig.5 Situation change of stable local current while rotate speed is 4 000 r/min
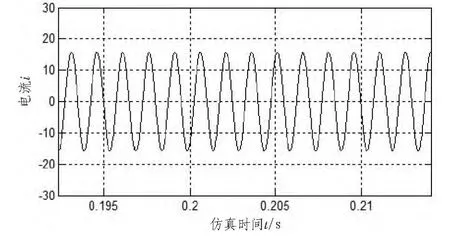
圖6 轉速為10 000 r/min時穩定局部電流的變化情況Fig.6 Situation change of stable local current while rotate speed is 10 000 r/min
由圖5,6可知,系統穩定時,電機側穩態輸入電流幾乎為標準正弦波。這是因為隨著充電過程的進行,負載端輸出電壓不斷增大,從而與給定電壓之間的差值不斷減小,當負載電壓達到給定電壓,PI調節器的輸入為零,輸出直流電流同時達到穩定,進而交流輸入電流幅值達到穩定,最終交流輸入電流按照給定正弦電流變化。穩態輸入電流的幅值與頻率跟隨轉速變化而變化,轉速越大,穩態輸入電流幅值越大,頻率越高。這可以從穩態電壓方程式和轉速頻率關系式得到。
3.2 轉速一定,負載改變時輸出電壓與輸入電流的變化情況
保持轉速為10 000 r/min,將負載從感性負載變為電阻負載,輸出電壓與電機側輸入電流的變化情況分別如圖7,8所示。
由圖7與圖4可以知道,不同負載下都可以快速得到270 V并穩定在270 V左右,只是達到穩態的時間稍微不同。由圖8與圖6可以知道,在轉速一定,負載改變的情況下,穩態輸入電流幾乎是標準正弦波,且幅值與頻率保持不變。這說明,穩態輸入電流的幅值與頻率只與轉速有關,與負載無
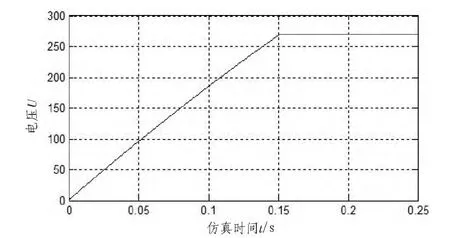
圖7 電阻負載時輸出電壓的變化情況Fig.7 Situation change of output voltage while load is resistance
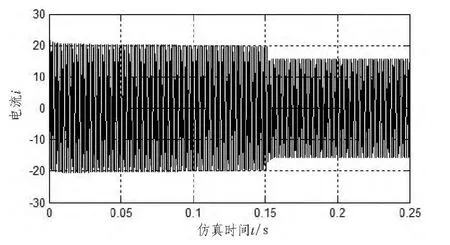
圖8 電阻負載時輸入電流的變化情況Fig.8 Situation change of input current while load is resistance
關。這由穩態電壓方程和轉速頻率關系式可以推測出。
4 結束語
由以上仿真結果可以看出,本文所設計的高壓直流電源系統達到了預期效果,既滿足穩態時電機側輸入電流為標準正弦波,改善了功率因數,提高了發電效率,且滿足在飛機速度發生改變或者負載發生變化時始終輸出穩定高壓直流,可靠性高,且系統結構簡單。可以預測,在不久的將來,隨著飛機上用電設備的增加以及飛機供電要求的增長,高壓直流電的優勢將越來越明顯,高壓直流電源系統將成為飛機上不可缺少的電源系統之一。
[1]沈頌華.航空航天器供電系統[M].1版.北京:北京航空航天出版社,2005.
[2]王秀和.永磁電機[M].2版.北京:中國電力出版社,2010.
[3]陳堅,康勇.電力電子學-電力電子變換和控制技術[M].3版.北京:高等教育出版社,2011.
[4]王兆安,劉進軍.電力電子技術[M].5版.北京:機械工業出版社,2009.
[5]周增福,嚴仰光.飛機專用電源系統的設計與仿真[J].微特電機,2006,10(6):1-2.ZHOU Zeng-fu,YAN Yang-guang.Design and simula tion for special electr ical power supply system of aircraft[J].Small and Special Motor,2006,10(6):1-2.
[6]洪乃剛.電力電子電機控制系統仿真技術[M].1版.北京:機械工業出版社,2013.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
裝備制造技術(2019年12期)2019-12-25 03:06:46
當代陜西(2019年11期)2019-06-24 03:40:28
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
