載體驅(qū)動微機械陀螺輸出信號解調(diào)算法研究
2015-01-19 15:17:14丁巖松張
科技視界 2015年20期
丁巖松張 偉
(1.中國人民解放軍裝甲兵工程學院控制工程系,中國 北京100072;
2.北京信息科技大學傳感技術(shù)研究中心,中國 北京100101)
載體驅(qū)動微機械陀螺輸出信號解調(diào)算法研究
丁巖松1張 偉2
(1.中國人民解放軍裝甲兵工程學院控制工程系,中國 北京100072;
2.北京信息科技大學傳感技術(shù)研究中心,中國 北京100101)
微機械擺和旋轉(zhuǎn)體共同構(gòu)成載體驅(qū)動陀螺,使陀螺擴展為不同用途的載體驅(qū)動和自身驅(qū)動結(jié)構(gòu)兩類。載體驅(qū)動微機械陀螺巧妙地利用旋轉(zhuǎn)體滾動作為驅(qū)動力來源,結(jié)構(gòu)簡單、成本低。安裝在旋轉(zhuǎn)體上的微機械擺具有陀螺效應(yīng),它和旋轉(zhuǎn)體構(gòu)成載體驅(qū)動陀螺,能同時檢測旋轉(zhuǎn)體的偏航/俯仰和自旋角速度,完成三只傳統(tǒng)陀螺的功能。但目前,其輸出信號的解調(diào)算法是一個沒有攻克的難點。針對檢測和控制旋轉(zhuǎn)體姿態(tài)的技術(shù)要求,研究載體驅(qū)動微機械陀螺輸出信號的解調(diào)算法,解算出偏航/俯仰和自旋角速度,用于單通道和三通道旋轉(zhuǎn)體姿態(tài)控制。
載體驅(qū)動;微機械陀螺;解調(diào)算法
0 引言
近幾年,高速旋轉(zhuǎn)體得到了廣泛地應(yīng)用。阻礙其發(fā)展的瓶頸是敏感高速旋轉(zhuǎn)體姿態(tài)(自旋、偏航/俯仰角速度,以及偏航、俯仰角度)的傳感器技術(shù),這是涉及旋轉(zhuǎn)體實用化的核心技術(shù)。開發(fā)各種旋轉(zhuǎn)體離不開敏感姿態(tài)(角速度、角度)的陀螺,傳統(tǒng)陀螺僅適用于非旋轉(zhuǎn)體。鑒于缺少適合旋轉(zhuǎn)體的陀螺,人們不得不將非旋轉(zhuǎn)體用的陀螺用于旋轉(zhuǎn)體。實驗表明,非旋轉(zhuǎn)體用的陀螺,雖然加反旋器在低轉(zhuǎn)速情況下亦可用,但性能指標達不到要求,且使用成本極高。由于安裝在旋轉(zhuǎn)體上的微機械擺具有陀螺效應(yīng)。理論論證表明,微機械擺和旋轉(zhuǎn)體共同構(gòu)成的慣性系統(tǒng),實際上就是載體驅(qū)動陀螺,它能檢測和控制旋轉(zhuǎn)體的姿態(tài)[1]。因此,針對檢測和控制旋轉(zhuǎn)體姿態(tài)的技術(shù)要求,開展載體驅(qū)動微機械陀螺的結(jié)構(gòu)、工藝和應(yīng)用技術(shù)研究,完善這一新的學科分支具有重要的科學意義和實用價值。
當前,國內(nèi)外研制的微機械陀螺幾乎都是有驅(qū)動結(jié)構(gòu)的。對于有驅(qū)動結(jié)構(gòu)陀螺,人們習慣于用三個互相垂直安裝的角速度陀螺,通過信號處理,將信號用于控制系統(tǒng),這是較成熟的技術(shù)。研制無驅(qū)動結(jié)構(gòu)(即載體驅(qū)動)的微機械陀螺的國家,國外僅有俄羅斯,但技術(shù)對我國嚴格封鎖。對于載體驅(qū)動微機械陀螺,首先要通過直角坐標或極坐標變換,由陀螺輸出信號分離出偏航/俯仰角速度和自旋角速度信號,然后進行信號解調(diào),并用于控制系統(tǒng)。而輸出信號解調(diào)算法是一個重點和難點。
1 載體驅(qū)動微機械陀螺概述
陀螺可分為機電陀螺和光學陀螺兩類。隨著慣性導(dǎo)航和慣性制導(dǎo)技術(shù)的不斷發(fā)展,多種機電陀螺和光學陀螺相繼研制成功并投入應(yīng)用,其中發(fā)展最快的是光纖陀螺和微機械陀螺[2],如圖1所示。
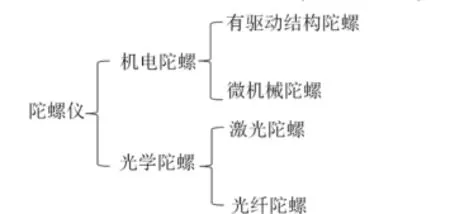
圖1 陀螺分類
上世紀90年代,隨著微電子技術(shù)的發(fā)展,各種各樣的硅微機械陀螺相應(yīng)產(chǎn)生。但大部分微機械陀螺都必須是在受驅(qū)動后建立起初始振動才能敏感載體的轉(zhuǎn)動角速度,故這種陀螺設(shè)計和制作難度大。為了避免上述困難,提出利用旋轉(zhuǎn)載體自身的旋轉(zhuǎn)作為驅(qū)動,通過垂直于載體自旋角速度方向的俯仰或偏航角速度產(chǎn)生的哥氏力來敏感載體的俯仰或偏航角速度。這種陀螺由于沒有驅(qū)動部分,故結(jié)構(gòu)簡單,易加工。
2 基于微機械陀螺的輸出信號解調(diào)
2.1 解調(diào)算法
微機械陀螺輸出信號是含有橫滾、偏航和俯仰三個角速度信息的調(diào)制信號。如何從復(fù)雜信號中將此三個角速度提取出來,為旋轉(zhuǎn)飛行載體多通道控制系統(tǒng)提供控制依據(jù)成為微機械陀螺應(yīng)用的關(guān)鍵技術(shù)問題。
對微機械陀螺信號進行頻譜分析,可以得到旋轉(zhuǎn)飛行載體的滾動角速度,或者利用加速度計信號求取滾動角速度;輸出信號的包絡(luò)的幅值可以求取俯仰和偏航的合角速度,而俯仰和偏航的夾角恰好等于微機械陀螺信號和加速度計信號的相位差[3]。圖2為載體驅(qū)動微機械陀螺信號處理電路。
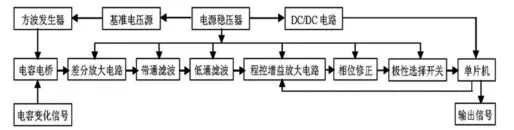
圖2 載體驅(qū)動微機械陀螺信號處理電路
根據(jù)圖2所示的信號處理電路,得到載體驅(qū)動微機械陀螺的輸出信號,如圖3所示。
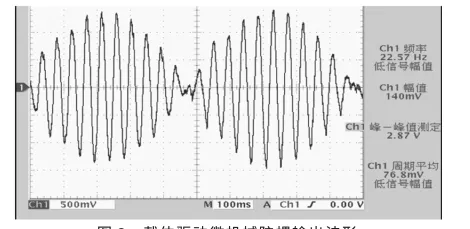
圖3 載體驅(qū)動微機械陀螺輸出波形
微機械陀螺信號經(jīng)過預(yù)處理電路以后,仍會有很大的噪聲。因此,在進行信號解調(diào)之前,要對信號進行平滑濾波。常見的濾波算法如:小波濾波算法、IIR濾波算法、FIR濾波算法、自適應(yīng)濾波算法、卡爾曼濾波算法、零相移濾波算法等[4]。通過各種濾波算法濾波前后信噪比的比較,部分算法濾波后相位發(fā)生偏移或者誤差較大。其中,零相移濾波算法沒有這兩個弊端,在微機械陀螺信號濾波中常被采用。
輸出信號經(jīng)圖4所示解調(diào)算法處理,可獲得地理坐標系下用于旋轉(zhuǎn)體三通道姿態(tài)控制的偏航/俯仰、自旋角速度和角位置信號。其中,e(t)為幅值,θ(t)為角度,f(t)為頻率。
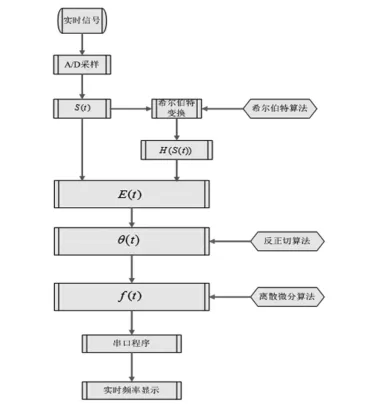
圖4 載體驅(qū)動微機械陀螺輸出信號用于旋轉(zhuǎn)體姿態(tài)控制的解調(diào)算法流程
3 結(jié)束語
載體驅(qū)動微機械陀螺是一個新的學科分支,有重要的科學意義和應(yīng)用價值。針對載體驅(qū)動微機械陀螺輸出信號解調(diào)這一難點問題,基于對信號處理電路和輸出波形的分析,給出了可供參考的算法流程。
[1]吳立鋒,嚴慶文.高速旋轉(zhuǎn)飛行體姿態(tài)傳感器信號解調(diào)方法[J].傳感器與微系統(tǒng),2010(6):28-31.
[2]張富強,嚴慶文.無驅(qū)動結(jié)構(gòu)硅微機械陀螺的原理分析和性能測試[J].儀表技術(shù)與傳感器,2009:16-24.
[3]方靖,商捷,顧啟泰.微機械陀螺隨機誤差建模的實驗研究[J].傳感技術(shù)學報, 2008,21(9):1514-1518.
[4]柳貴福.微機械陀螺輸入輸出特性建模及補償技術(shù)研究[D].哈爾濱工程大學, 2002,3(9):45-56.
鄧麗麗]
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
中國生殖健康(2019年3期)2019-02-01 06:12:26
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49