基于兩類運動想象的二維光標控制的研究
2015-01-25 10:50:54黃硯冰
電子設計工程 2015年3期
黃硯冰,夏 斌
(上海海事大學 上海 201306)
腦-機接口(Brain Computer Interface, BCI)作為一種幫助腦組織損傷的患者實現大腦與外界環境直接交流的一種人工輔助技術,近年來成為神經科學,信號處理等領域的研究熱點而基于腦-機接口的二維控制一直是研究重點,國內外的研究團隊開展了諸如腦-機接口鼠標[1],輪椅控制,機械手控制等的研究。
腦-機接口可以根據采集數據方式不同可以分為侵入式和非侵入式。其中侵入式的BCI的研究由于涉及到大量的技術難題和臨床風險,所以多集中在動物身上或者某一部分人身上,其推廣性受到限制。而非侵入式的BCI系統,通過安放置在大腦皮層外的采集電極就可以實現對腦電信號的采集,這種接觸式的采集電極安全,易操作、靈活。另外Wolpaw JR等人[3]利用基于感覺運動節律的非侵入式的腦-機接口實現了多維控制,控制效果與侵入式控制效果接近,這些研究成果在一定程度上推動了非侵入式腦-機接口在二維控制研究中的發展。目前非侵入式BCI二維光標控制的研究進展比較有代表性的工作有Trejo L J等人的工作[4];有Xia B研究團隊實現的基于三類MI的二維控制[5];Li Y團隊采用混合MI與P300兩種模態的腦電信號作為輸出命令信號實現了二維控制[6];Allison B Z等人采用ERD/SSVEP的混合腦電信號實現了二維控制[7]等。
現有的二維控制系統中仍然存在一些問題,例如使用難度大,光標移動軌跡不平滑,光標可移動位置有限等問題。為了解決以上這些問題,我們擬采用運動想象來實現二維控制。設計了基于兩類MI的二維控制策略,特點是基于最少種類的MI實現光標的二維控制。
1 基于兩類MI的二維控制策略設計
為實現光標在二維平面內的任意移動,通常需要有左右上下4個控制命令,所以基于運動想象的腦機接口在線分類出的種類越多,二維控制就越簡單。但是運動想象任務數量的增加會使得用戶難以準確控制。受汽車駕駛過程中左右轉動方向盤的啟發,我們設計了一個基于兩類MI旋轉坐標系的二維控制,該旋轉坐標系由兩個固定成120°角的映射方向組成。具體的實現如下:
首先實時采集的腦電信號會先經過公共空間模式(Common Spatial Patterns,CSP)提取腦電信號的特征,經過線性SVM分類器得到兩類運動想象分類的輸出概率P1,P2(P1+P2=1,分別代表左右手運動想象),其中SVM每100 ms輸出一組概率值。然后把輸出概率映射到旋轉坐標系(Rotating Coordinate System,RCS)上矢量合成光標的移動速度,完成光標移動控制。光標移動過程中旋轉坐標系的移動情況如圖1所示。光標的速度是矢量合成,上一個100 ms的速度Vk與在RCS中新合成的速度Vks進行矢量合成,如公式(1),其中 ε 是衰減因子(ε∈[0.1,1])用來防止速度增量太大。
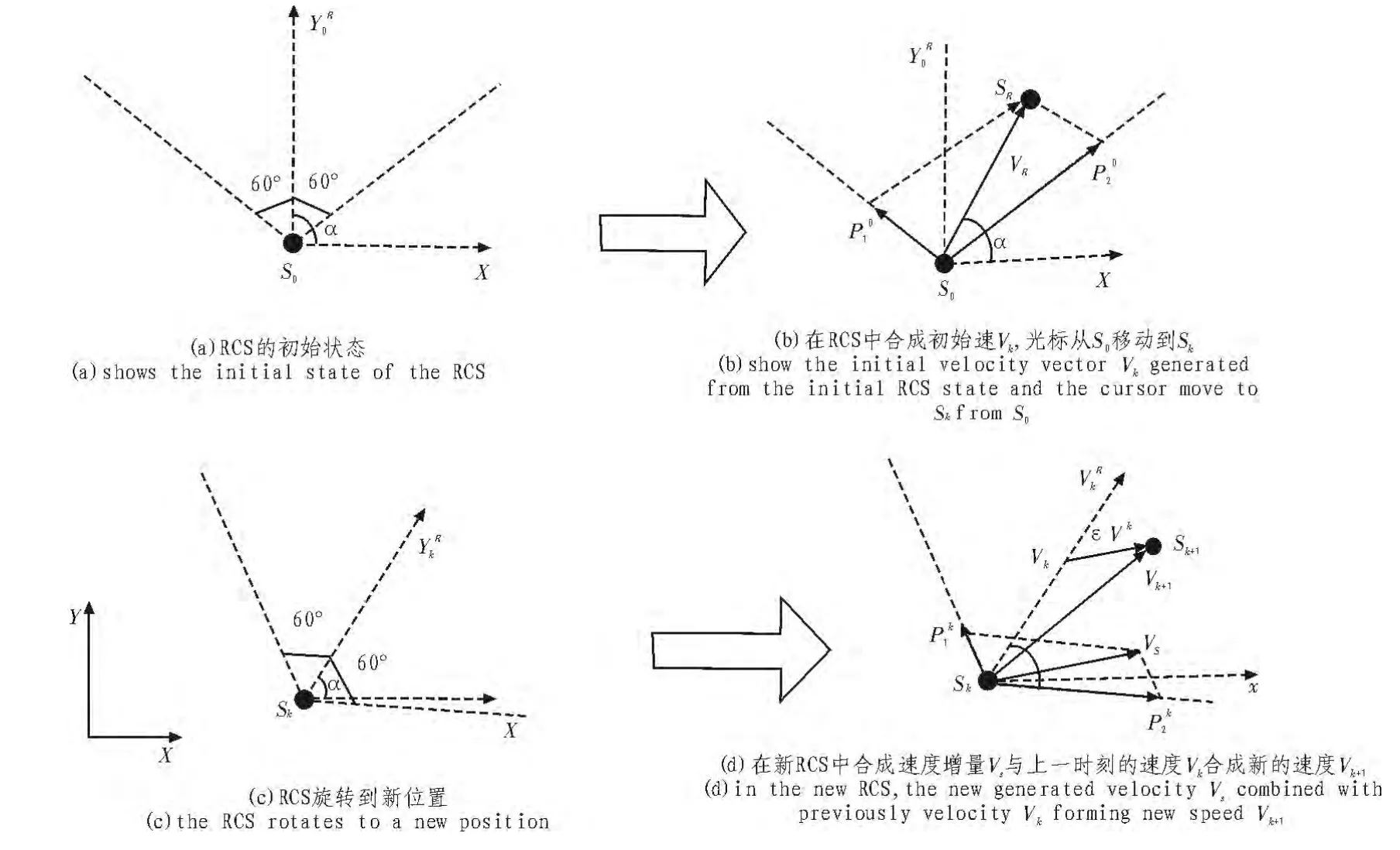
圖1 光標移動與速度合成細節Fig.1 Shows the detail of cursor movement and the generating velocity vector by combing probabilities in the RCS

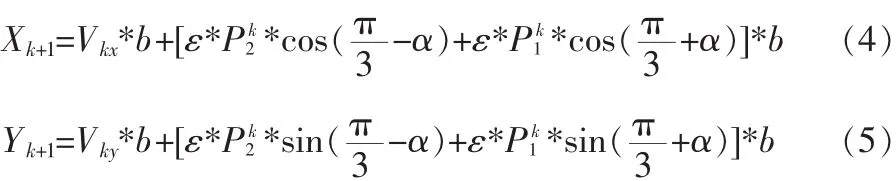
光標的移動是在合成速度乘上一個位移映射因子b=8pixel的作用下完成的。光標在直角坐標系中的計算方式如圖3所示,圖中角度α是RCS中心方向順時針旋轉時與水平正向的夾角,變化范圍是α∈[0,2π]。假設光標在上一時刻Sk位置的坐標是:

那么在下一個100 ms,光標移動到新的位置Sk+1,她的坐標計算方法如下:
2 實 驗
為了驗證控制策略的有效性,我們邀請了四名健康的受試參加二維光標控制實驗,年齡在20~26歲之間(平均年齡是23歲),均是右手寫字習慣。實驗開始之前,他們會被告知實驗的基本原理以及實驗目的,然后由他們自愿簽署知情同意書,在每次實驗結束后會收到一定的報酬。其中受試S1和受試S2有過一些運動想象的控制經驗。其他兩名受試沒有腦-機接口實驗經驗。實驗過程中,受試被要求坐在電腦前面約80 cm位置,盡量保持頭部和肢體不動,精神狀態飽滿。
圖2 直角坐標系統中光標位置的計算方法Fig.2 Shows the detail of calculating the cursor movement in the rectangular coordinate system
實驗界面如圖3所示,控制界面是一個矩形大小1440*838 pixels,start球是光標的起始點,稱為光標球,目標球是兩倍光標球大小,分布在5個角度不固定的位置,按照數字標識依次顯示。一個目標球是一個trial,5個目標全部完成是一個run。界面的右下角的速度表盤位置(240*300 pixels)用來實時的顯示光標的移動速度。光標球的工作界面大小是(1440*838-240*300)pixels。 實驗設置光標球大小,目標球大小和實驗界面大小的比值是0.00048:0.0022:1。
受試根據系統的提示進行固定時間長度的運動想象,在每個trial開始之前,會有一個3 s倒計時,倒計時結束后,目標球變色,如果受試可以在60 s時間內,控制移動光標撞擊到目標球,則此次trial會提前終止,否則會在60 s后終止,緊接著進入下一個trial的實驗。依次類推。5個按照圖中目標位置順序出現。系統中的移動光標球的坐標每0.1 s更新一次。實驗要求每個受試進行15個run的控制實驗。
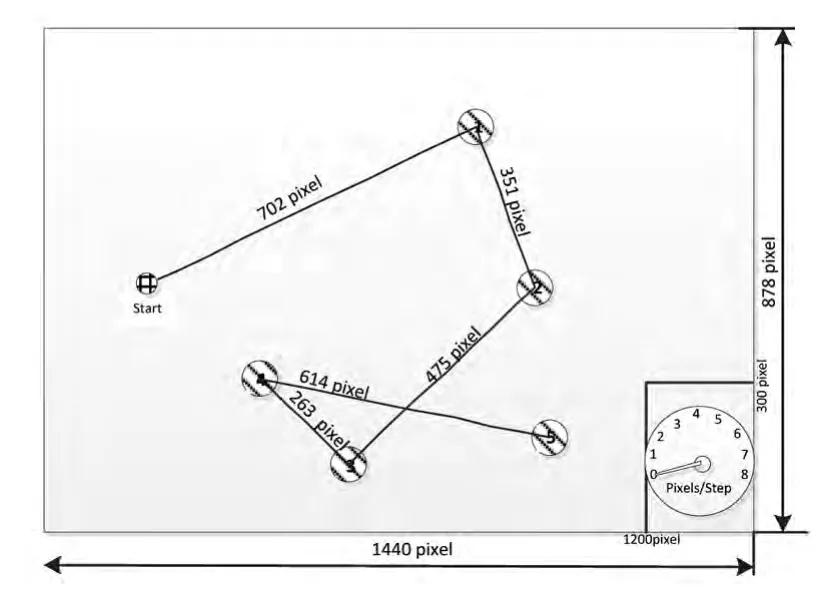
圖3 固定5目標實驗仿真圖Fig.3 The five 5-fixed target experimental simulation map
3 實驗結果與分析
4位受試分別進行了15個run的控制實驗,目標完成率平均在100%,但是每個run的平均完成時間因人而異,其中受試S1的控制效果最好。在表1中展示了試驗次數,目標成功完成率,一個run的平均完成時間和光標移動軌跡與最優路徑的比值(越接近1,說明光標的移動軌跡越趨近于最優路徑)。另外在圖4中,我們展示了4名受試在實驗過程中的光標移動軌跡疊加圖。可以清晰看到光標的移動是一種近似直線的移動過程,且軌跡平滑。其中受試S1由于之前有著豐富的控制經驗,在此次的驗證實驗中,光標的移動軌跡最接近最優路徑(圖4,左一)。另外受試S2也有著豐富的控制經驗,但是控制效果相對于受試S1差一點,通過溝通得知,他在控制的過程中喜歡交替的想象左右手,而受試S1大部分時候是同時適當的調整左右手控制情況。另外在我們的控制策略中,由于沒有直接后退的功能,當受試錯過目標后,需要持續想象左右手中的一個,完成光標調換方向的功能。容易引起如圖4中軌跡繞圈的現象。這一點也是我們后期需要完善解決的工作。
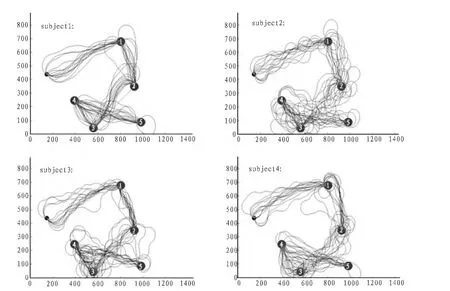
圖4 4名受試的光標軌跡疊加圖Fig.4 The cursor trajectories in the five-fixed target experiment
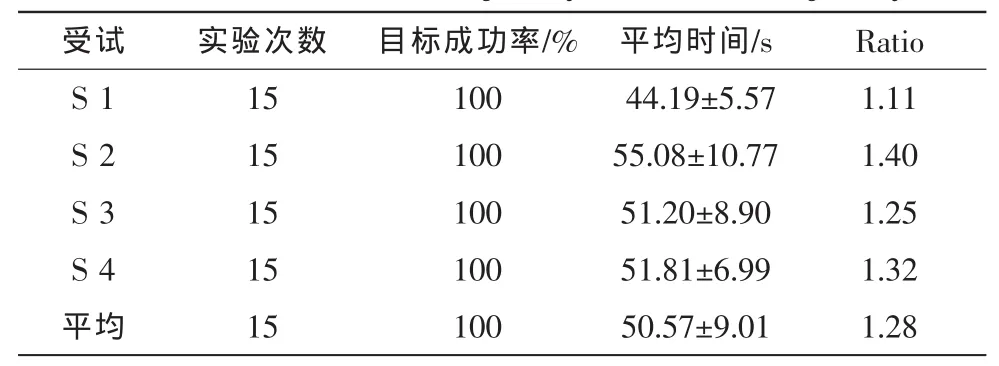
表1 固定五目標實驗結果:Ratio=實際路徑平均長度/最優路徑比值Tab.1 Results of the Five-Fixed target experiments:Ratio=the mean cursor movement trajectory/the shortest trajectory
4 結 論
文中提出了一種新的基于兩類MI的二維控制策略,從驗證實驗結果上,可以得出如下結論,由于該控制策略只用兩類MI,受試的控制難度降低,另外解決了光標移動軌跡的平滑和移動位置的任意性的問題。本文工作對于未來二維控制的研究會有重要的參考意義。
[1]McFarland D J,Krusienski D J,Sarnacki W A,et al.Emulation of computer mouse control with a noninvasive brain-computer interface[J].Journal of neural engineering,2008,5(2):101.
[2]Citi L,Poli R,Cinel C,et al.P300-based BCI mouse with genetically-optimized analogue control[J].Neural Systems and Rehabilitation Engineering, IEEE Transactions on,2008,16(1):51-61.
[3]Wolpaw J R,McFarland D J.Control of a two-dimensional movement signal by a noninvasive brain-computer interface in humans[J].Proceedings of the National Academy of Sciences of the United States of America,2004,101 (51):17849-17854.
[4]Trejo L J,Rosipal R,Matthews B.Brain-computer interfaces for 1-D and 2-D cursor control:designs using volitional control of the EEG spectrum or steady-state visual evoked potentials [J]. Neural Systems and Rehabilitation Engineering, IEEE Transactions on,2006,14(2):25-229.
[5]Xia B,Yang H,Zhang Q,et al.Control 2-dimensional movement using a three-class motor imagery based Brain-Computer Interface[C]//Engineering in Medicine and Biology Society (EMBC), 2012 Annual International Conference of the IEEE.IEEE,2012:1823-1826.
[6]Li Y,Long J,Yu T,et al.An EEG-based BCI system for 2-D cursor control by combining Mu/Beta rhythm and P300 potential[J].Biomedical Engineering, IEEE Transactions on,2010,57(10):2495-2505.
[7]Allison B Z,Brunner C,Altst?tter C, et al.A hybrid ERD/SSVEP BCI for continuous simultaneous two dimensional cursor control[J].Journal of Neuroscience Methods,2012,209(2):299-307.
猜你喜歡
科普童話·學霸日記(2021年4期)2021-09-05 04:28:51
能源工程(2020年6期)2021-01-26 00:55:22
當代陜西(2020年13期)2020-08-24 08:22:02
小學生作文(低年級適用)(2019年12期)2020-01-18 07:50:36
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
中國化妝品(2018年6期)2018-07-09 03:12:42
制造技術與機床(2017年5期)2018-01-19 02:49:17
讀者(2017年15期)2017-07-14 19:59:34
濰坊學院學報(2016年2期)2016-12-01 13:00:11