基于S函數(shù)的智能自適應(yīng)PID工具箱設(shè)計(jì)
2015-01-27 05:04:47
自動(dòng)化與儀表 2015年11期
關(guān)鍵詞:設(shè)計(jì)
(防化研究院,北京 102205)
Simulink是Matlab平臺(tái)下用于工程問(wèn)題建模和動(dòng)態(tài)仿真分析的平臺(tái),其本身具有良好的圖形交互界面,通過(guò)采用Simulink模塊組合的方法可以快速、準(zhǔn)確地進(jìn)行仿真[1]。但當(dāng)系統(tǒng)采用較復(fù)雜的控制規(guī)律時(shí),Simulink中沒(méi)有現(xiàn)成的模塊可用,此時(shí)通常需要編寫復(fù)雜的M文件源代碼進(jìn)行仿真,但該方法一是編程復(fù)雜工作量大,二是所編M文件不具有通用性,三是無(wú)法利用Simulink直觀的圖形界面和其余模塊[2]。針對(duì)這種現(xiàn)狀,本文利用S函數(shù)實(shí)現(xiàn)了基于單神經(jīng)元、RBF神經(jīng)網(wǎng)絡(luò)和BP神經(jīng)網(wǎng)絡(luò)的自適應(yīng)PID控制器,可將其嵌入Simulink進(jìn)行仿真,大大減少了編程工作量,提高了算法仿真效率。
1 S函數(shù)簡(jiǎn)介
S函數(shù)(S-function)是系統(tǒng)函數(shù)的簡(jiǎn)稱,在控制理論研究中,經(jīng)常需要用復(fù)雜的算法設(shè)計(jì)控制器,而這些算法因其復(fù)雜性而難以用Simulink標(biāo)準(zhǔn)模塊搭建,此時(shí)編程設(shè)計(jì)出S函數(shù)即可將其嵌入到Simulink中。S函數(shù)基本引導(dǎo)語(yǔ)句[1]為Function[sys,x0,str,ts]=fun(t,x,u,flag,p1,p1,…)其中:t,x,u分別為時(shí)間、狀態(tài)、輸入;flag為標(biāo)志位,用于控制S函數(shù)執(zhí)行的任務(wù)與返回不同數(shù)據(jù)。在一個(gè)仿真周期中,S函數(shù)具體流程如圖1所示。

圖1 一個(gè)仿真周期的S函數(shù)仿真流程Fig.1 Simulation procedures of S-function in a cycle
使用S函數(shù)仿真時(shí),需清楚系統(tǒng)在不同時(shí)刻所需要的信息,如初始化時(shí)需清楚連續(xù)與離散狀態(tài)變量數(shù)目、初值,確定采樣時(shí)間等;進(jìn)而對(duì)離散部分采用 mdlUpdates更新離散狀態(tài);對(duì)連續(xù)部分采用mdlDerivates計(jì)算連續(xù)導(dǎo)數(shù);mdlOutputs計(jì)算S函數(shù)輸出。
2 先進(jìn)PID算法的S函數(shù)設(shè)計(jì)
2.1 單神經(jīng)元自適應(yīng)PID
由具有自學(xué)習(xí)和自組織能力的單神經(jīng)元構(gòu)成自適應(yīng)PID控制器,其結(jié)構(gòu)簡(jiǎn)單、能適應(yīng)環(huán)境變化、有較強(qiáng)魯棒性[3]。單神經(jīng)元自適應(yīng)PID的結(jié)構(gòu)框圖如圖2所示。

圖2 單神經(jīng)元自適應(yīng)PID控制系統(tǒng)結(jié)構(gòu)Fig.2 Structure of single neuron adaptive PID control system
S函數(shù)主體部分為

將 S函數(shù)嵌入 Simulink中設(shè)計(jì)基于單神經(jīng)元的自適應(yīng)PID控制器,其內(nèi)部結(jié)構(gòu)封裝如圖3所示。

圖3 單神經(jīng)元自適應(yīng)PID控制器封裝Fig.3 Mask of single neuron adaptive PID controller
2.2 RBF神經(jīng)網(wǎng)絡(luò)PID
RBF神經(jīng)網(wǎng)絡(luò)自適應(yīng)PID控制系統(tǒng)利用RBF神經(jīng)網(wǎng)絡(luò)辨識(shí)被控對(duì)象并按照一定的學(xué)習(xí)算法在每個(gè)仿真周期更新PID參數(shù)和RBF神經(jīng)網(wǎng)絡(luò)參數(shù)[4-5],系統(tǒng)結(jié)構(gòu)如圖4所示。
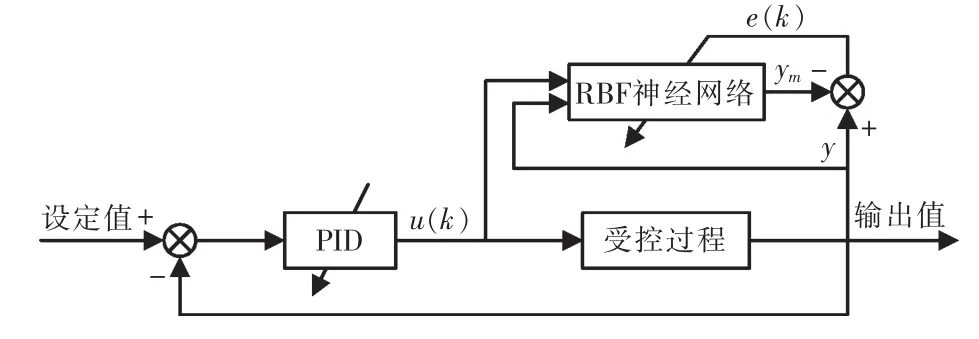
圖4 RBF神經(jīng)網(wǎng)絡(luò)自適應(yīng)PID控制系統(tǒng)結(jié)構(gòu)Fig.4 Structure of RBF adaptive PID control system
S函數(shù)主體部分為
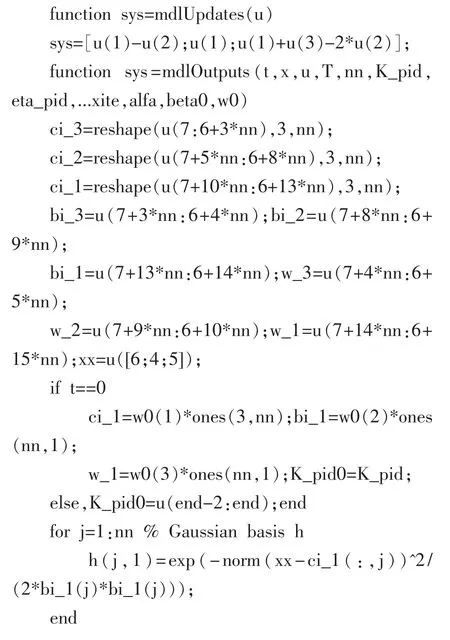
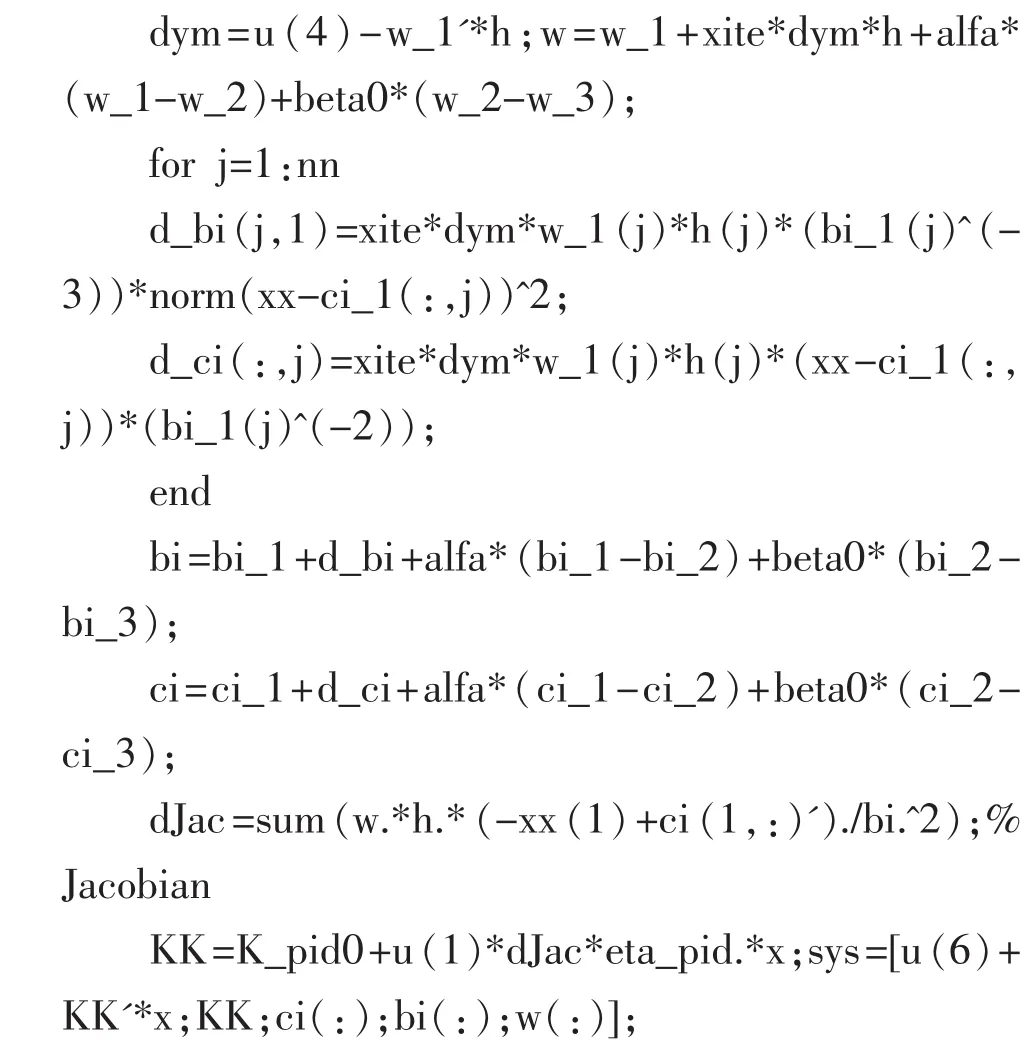
將編寫的S函數(shù)嵌入到Simulink環(huán)境中,和延遲環(huán)節(jié)、飽和環(huán)節(jié)等其他標(biāo)準(zhǔn)模塊組合成基于RBF神經(jīng)網(wǎng)絡(luò)的自適應(yīng)PID控制器,并封裝即可。
2.3 BP神經(jīng)網(wǎng)絡(luò)PID
BP神經(jīng)網(wǎng)絡(luò)自適應(yīng)PID控制系統(tǒng)利用BP神經(jīng)網(wǎng)絡(luò)辨識(shí)被控對(duì)象并按照一定的學(xué)習(xí)算法在每個(gè)仿真周期更新PID參數(shù)和神經(jīng)網(wǎng)絡(luò)參數(shù)[4-5],系統(tǒng)結(jié)構(gòu)如圖5所示。算法中BP神經(jīng)網(wǎng)絡(luò)的隱含層數(shù)目、神經(jīng)元個(gè)數(shù)等參數(shù)均可在封裝之后的圖形界面中輸入并可自由改動(dòng)。
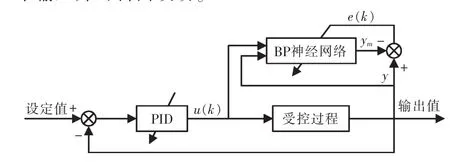
圖5 BP神經(jīng)網(wǎng)絡(luò)自適應(yīng)PID控制系統(tǒng)結(jié)構(gòu)Fig.5 Structure of BP neural network adaptive PID control system
S函數(shù)主體部分為
同樣的將編寫的S函數(shù)嵌入到Simulink環(huán)境中和其他標(biāo)準(zhǔn)模塊組合成基于RBF神經(jīng)網(wǎng)絡(luò)的自適應(yīng)PID控制器,并進(jìn)行封裝即可。
3 仿真結(jié)果
利用S函數(shù)實(shí)現(xiàn)了以上先進(jìn)控制算法的基礎(chǔ)上,封裝之后即可在Simulink中調(diào)用,而被控對(duì)象模型可用Simulink標(biāo)準(zhǔn)模塊搭建。以單神經(jīng)元自適應(yīng)PID控制系統(tǒng)為例,其仿真模型如圖6所示,對(duì)控制器部分或者被控對(duì)象部分按照需要自由選取,則可快速進(jìn)行其他類型控制系統(tǒng)的設(shè)計(jì)與仿真。
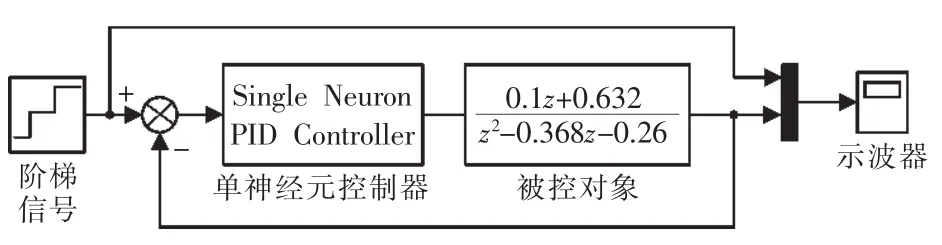
圖6 單神經(jīng)元自適應(yīng)PID控制系統(tǒng)Simulink框圖Fig.6 Simulink block diagram of single neuron adaptive PID control system
在以下仿真中,被控對(duì)象模型由離散狀態(tài)傳遞函數(shù)描述為

3種先進(jìn)算法的相應(yīng)曲線如圖7所示。可以看出對(duì)式(1)中的對(duì)象,單神經(jīng)元PID雖然結(jié)構(gòu)簡(jiǎn)單但性能卻是最好的。
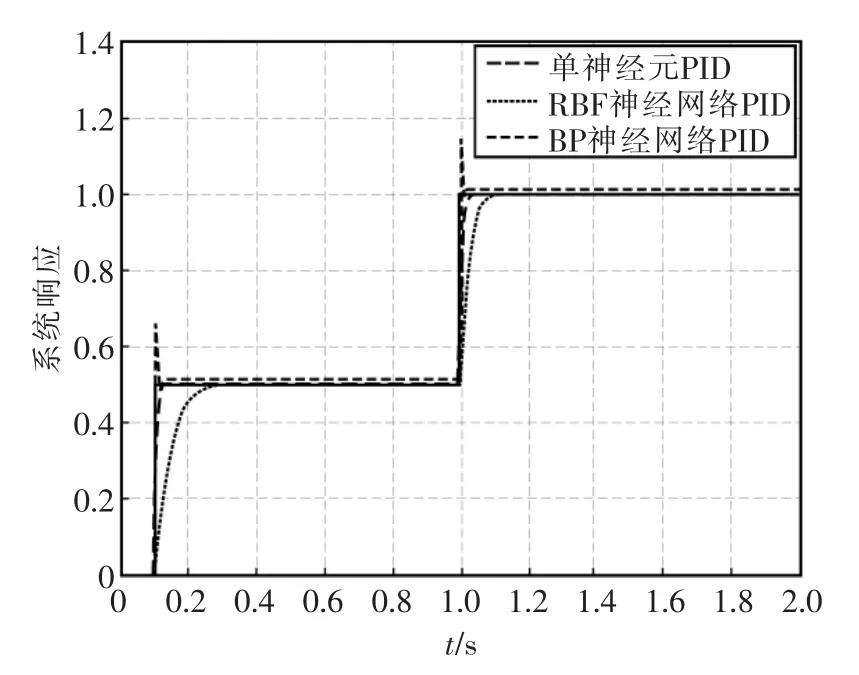
圖7 系統(tǒng)響應(yīng)曲線Fig.7 Step response curves of the system
4 結(jié)語(yǔ)
本文利用S函數(shù)實(shí)現(xiàn)了3種單神經(jīng)元自適應(yīng)PID、RBF神經(jīng)網(wǎng)絡(luò)自適應(yīng)PID和BP神經(jīng)網(wǎng)絡(luò)自適應(yīng)PID 3種先進(jìn)控制算法,并將其封裝成了標(biāo)準(zhǔn)化的模塊,可以在Simulink中自由調(diào)用并方便測(cè)試有關(guān)參數(shù)對(duì)算法性能的影響。基于S函數(shù)的先進(jìn)PID工具箱設(shè)計(jì)大大擴(kuò)展了Simulink的動(dòng)態(tài)仿真功能和對(duì)先進(jìn)算法的開(kāi)發(fā)能力,避免了每次都得針對(duì)特定的被控對(duì)象開(kāi)發(fā)M文件代碼,對(duì)先進(jìn)算法的研究和仿真具有重要的實(shí)用意義。
[1] 石良臣.MATLAB/Simulink系統(tǒng)仿真超級(jí)學(xué)習(xí)手冊(cè)[M].北京:人民郵電出版社,2014.
[2] 李紹銘,趙偉.基于S函數(shù)的RBF神經(jīng)網(wǎng)絡(luò)PID控制器Simulink仿真[J].安徽冶金科技職業(yè)學(xué)院學(xué)報(bào),2008,18(1):19-21.
[3] 劉金琨.先進(jìn)PID控制MATLAB仿真[M].3版.北京:電子工業(yè)出版社,2014.
[4] 龐中華,崔紅.系統(tǒng)辨識(shí)與自適應(yīng)控制[M].北京:北京航空航天大學(xué)出版社,2013.
[5] 薛定宇.控制系統(tǒng)計(jì)算機(jī)輔助設(shè)計(jì)—MATLAB語(yǔ)言與應(yīng)用[M].3版.北京:清華大學(xué)出版社,2012.
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04

- 自動(dòng)化與儀表的其它文章
- 基于模型設(shè)計(jì)的單相光伏并網(wǎng)逆變器研究
- 基于Matlab的電路分析實(shí)驗(yàn)平臺(tái)設(shè)計(jì)
- 地鐵輸電接觸軌動(dòng)態(tài)檢測(cè)系統(tǒng)設(shè)計(jì)與研究
- 基于MVC的項(xiàng)目管理系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
- 基于LabVIEW與FPGA的飛行訓(xùn)練彈測(cè)試系統(tǒng)設(shè)計(jì)
- 風(fēng)電場(chǎng)群遠(yuǎn)程集中監(jiān)控系統(tǒng)設(shè)計(jì)及智能化管理