地鐵輸電接觸軌動態(tài)檢測系統(tǒng)設(shè)計與研究
2015-01-27 05:04:45
自動化與儀表 2015年11期
(天津中德職業(yè)技術(shù)學(xué)院 電氣與能源學(xué)院,天津 300350)
目前,地鐵是緩解城市交通壓力、減少噪音與空氣污染、實現(xiàn)綠色出行方式的主要手段。地鐵運行安全事關(guān)重大,因此地鐵生產(chǎn)和運營單位對地鐵運行及相關(guān)設(shè)施的檢測越來越重視。地鐵輸電接觸軌作為地鐵運行中的供電通道是保證地鐵運行的關(guān)鍵部件。
下接觸式地鐵輸電接觸軌(簡稱“第三軌”)最大截面積約0.01 m2、單根長度約15 m,90~120 m為1個鉚段,每個鉚段兩端接觸軌與支架固定聯(lián)結(jié)形成2個鉚結(jié),每個鉚段的正中間是1個膨脹接頭,其他位置是間隔約5 m的活動頭支架。由于輸電接觸軌長徑比較大,受自身結(jié)構(gòu)、變形、外力干擾等因素影響,在地鐵長期運行中會出現(xiàn)嚴(yán)重變形,阻礙集電靴的正常運行,從而造成嚴(yán)重事故。為此,對輸電接觸軌變形狀態(tài)的檢測成為地鐵運營公司每天必行的檢測內(nèi)容。
目前,對地鐵輸電接觸軌的檢測主要有2種方式,一種是每天在地鐵停止運行后的有限時間內(nèi)(約4 h)對輸電接觸軌進(jìn)行人工檢測[1],主要檢測參數(shù)是輸電接觸軌支架是否變形以及受流面直線度,檢測手段主要是依靠人的視覺;另一種是地鐵停運后利用地鐵綜合檢測車檢測走行軌的同時對輸電接觸軌進(jìn)行檢測,其主要檢測相鄰走行軌內(nèi)側(cè)與接觸軌受流面水平和垂直方向的距離,實時讀取檢測數(shù)據(jù),但檢測數(shù)據(jù)不記錄、不存儲,無法實現(xiàn)離線分析和預(yù)測。第一種人工檢測方法完全憑人工感覺,除非有明顯異常才能比較有把握的確定[2],效率低、精度差,占用勞動力較多、檢測速慢,檢測速度最多為3 km/h[3];第二種綜合檢測車檢測方法,通過檢測輸電接觸軌受流面中心到走行軌的水平距離以及受流面到走行軌頂面的垂直距離來反映輸電接觸軌的狀態(tài)[4],但事實證明當(dāng)該參數(shù)出現(xiàn)問題時,其根本原因還是輸電接觸軌支架變形所至。
本項目的關(guān)鍵創(chuàng)新點是找到了輸電接觸軌變形的首要因素,并有針對性地進(jìn)行檢測,該檢測功能可獨立使用,也可植入地鐵綜合檢測車。本文對支架形態(tài)檢測原理、方法及實現(xiàn)技術(shù)關(guān)鍵點進(jìn)行論述。
1 總體方案設(shè)計
大量現(xiàn)場案例反映,導(dǎo)致輸電接觸軌故障的最關(guān)鍵因素是其支架卡死,輸電接觸軌縱向調(diào)整的自由度受限,隨著輸電接觸軌的伸縮變形首先顯現(xiàn)的是支架變形,支架變形到一定程度方體現(xiàn)在輸電接觸軌受流面中心到走行軌的水平距離以及受流面到走行軌頂面的垂直距離產(chǎn)生變化。支架變形的最初表現(xiàn)是支架左右傾斜,繼而導(dǎo)致支架損壞,因此若能在支架變形初期盡早發(fā)現(xiàn)問題,對輸電接觸軌維護具有非常重要的意義。
本檢測系統(tǒng)的基本設(shè)計思路是利用一臺搭載檢測傳感器的檢測車對接觸軌支架的狀態(tài)和受流面垂直面內(nèi)直線度進(jìn)行自動檢測和故障預(yù)測,具體可檢測和顯示支架垂直度和受流面垂直面內(nèi)直線度、超差值、故障位置等參數(shù),并可實時記錄所有檢測點歷史數(shù)據(jù),可實現(xiàn)離線查詢和預(yù)測分析。檢測車采用電驅(qū)動,可在檢測車行進(jìn)過程中實現(xiàn)動態(tài)檢測,檢測臂可伸縮,適合常用地鐵走行軌,走行速度可調(diào),最高可達(dá)到15 km/h。下接觸式地鐵輸電接觸軌形態(tài)檢測裝置示意圖如圖1所示,主要包括檢測裝置、驅(qū)動系統(tǒng)、電源系統(tǒng)、編碼器傳動機構(gòu)、檢測臂、行走傳動機構(gòu)和車身本體等部分。
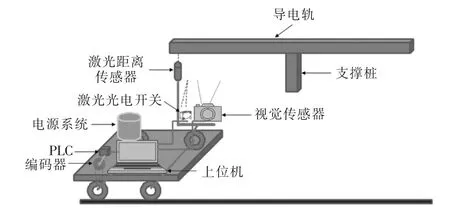
圖1 下接觸式地鐵輸電接觸軌形態(tài)檢測裝置Fig.1 Shape detecting device for under contact subway transmission rail
檢測裝置包括編碼器、激光光電傳感器、視覺傳感器、激光測距傳感器、上位機及檢測軟件等。當(dāng)檢測車以某一速度沿地鐵走行軌移動時,光電觸發(fā)傳感器遇支架側(cè)壁發(fā)出觸發(fā)信號直接觸發(fā)視覺傳感器采集支架垂直度形態(tài)的圖形數(shù)據(jù),通過以太網(wǎng)傳至上位機,并存入歷史數(shù)據(jù)庫;與此同時,激光測距傳感器每隔500 mm讀取一組接觸軌受流面垂直面內(nèi)直線度數(shù)據(jù),檢測數(shù)據(jù)通過A/D模塊傳至可編程序控制器;編碼器通過同步齒形帶與行走機構(gòu)前軸連接,用來記錄行走機構(gòu)的位移,編碼器信號通過高速輸入口傳至可編程序控制器。可編程序控制器裝在控制箱內(nèi),通過RS232接口與上位機相連,將可編程序控制器的數(shù)據(jù)傳至上位機實時數(shù)據(jù)庫,實時數(shù)據(jù)庫的數(shù)據(jù)在上位機內(nèi)可存入歷史數(shù)據(jù)庫。檢測系統(tǒng)原理框圖如圖2所示。
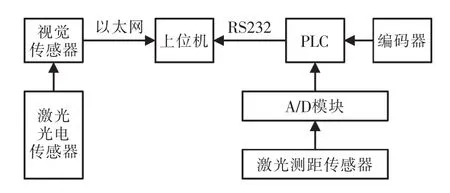
圖2 地鐵導(dǎo)電軌檢測系統(tǒng)硬件框圖Fig.2 Structure diagram of subway transmission rail detection system
行走機構(gòu)沿走行軌運動時,編碼器記錄行走機構(gòu)的行走位移;激光測距傳感器實時讀取距離接觸軌受流面的距離,獲取接觸軌形態(tài)數(shù)據(jù),即直線度數(shù)據(jù),上傳至上位機實時數(shù)據(jù)庫,上位機判斷直線度超差則給出報警提示,并通過編碼器計算位移,記錄下超差的位置,這一過程能檢測接觸軌連接處是否有 “錯位”;激光光電開關(guān)在限定距離內(nèi)感知“支撐樁”位置,碰到“支撐樁”側(cè)壁后發(fā)出觸發(fā)信號,該信號直接觸發(fā)視覺傳感器實時采集“支撐樁”圖形信息,與標(biāo)準(zhǔn)模型數(shù)據(jù)比較,判斷是否異常,出現(xiàn)異常則報警提示,并通過編碼器計算位移,記錄“異常”位置;同時視覺傳感器采集的實時數(shù)據(jù)通過以太網(wǎng)通信方式向上位機提供;上述實時數(shù)據(jù)均存入歷史數(shù)據(jù)庫,以進(jìn)行離線分析,離線分析可在上位機中查詢?nèi)我鈪^(qū)域和某一時刻接觸軌受流面的直線度以及任意“支撐樁”在某一時刻的圖像數(shù)據(jù),以進(jìn)行歷史狀態(tài)比較和趨勢分析,實現(xiàn)狀態(tài)預(yù)測診斷和維護。
2 基于視覺傳感器的輸電接觸軌支架狀態(tài)檢測和數(shù)據(jù)處理
本檢測裝置的關(guān)鍵技術(shù)是輸電接觸軌支架的識別、讀取和數(shù)據(jù)處理,選擇合適的視覺傳感器及檢測方法決定了檢測裝置的性能。
2.1 視覺傳感器的選擇與圖像識別方法
本檢測系統(tǒng)搭載的檢測車設(shè)計最高運行速度15 km/h,以兩支架最近距離4 m計算(一般為5 m),檢測車以15 km/h速度通過兩支架間的時間約為1 s,這樣需每秒鐘完成1個支架的檢測、運算、處理和存儲。經(jīng)試驗比較,對輸電接觸軌支架的識別選用OMRON智能視覺傳感器FZ-SLC15,配置高性能控制器FZ4-H 115型。視覺傳感器識別速度小于0.25 s,快門速度最大可達(dá)1/30000 s,圖像讀取時間12.5 ms,垂直度圖像檢索處理時間小于10 ms,數(shù)據(jù)存儲時間小于30 ms,滿足檢測時間周期的要求。
智能視覺傳感器在外部激光光電開關(guān)的觸發(fā)下,進(jìn)行圖像采集,從輸入圖像中搜索出與要查找的標(biāo)記模型最相似的部分,并高速檢測相關(guān)值(相似度)和位置。該搜索的方法即為將測量物的特征部分登錄為圖像模型,然后在輸入圖像中搜索與模型最相似的部分,并檢測其位置。可輸出表示相似程度的相關(guān)值、測量對象的位置及傾斜度。
本項目中智能視覺傳感器執(zhí)行測量的處理項目的設(shè)定方法采用“形狀搜索+”,使用重視輪廓信息的模型,即使存在照明的陰影、工件本身形狀的個體差異、姿態(tài)變化、干擾重疊、遮掩等環(huán)境變化因素,也可穩(wěn)定、高速、高精度地檢測出。視覺傳感器“形狀搜索+”的設(shè)定流程如圖3所示。
模型登錄將測量圖像的特征部分作為模型登錄。模型參數(shù)可根據(jù)需要變更,以適應(yīng)不穩(wěn)定的測量結(jié)果或提高處理速度。
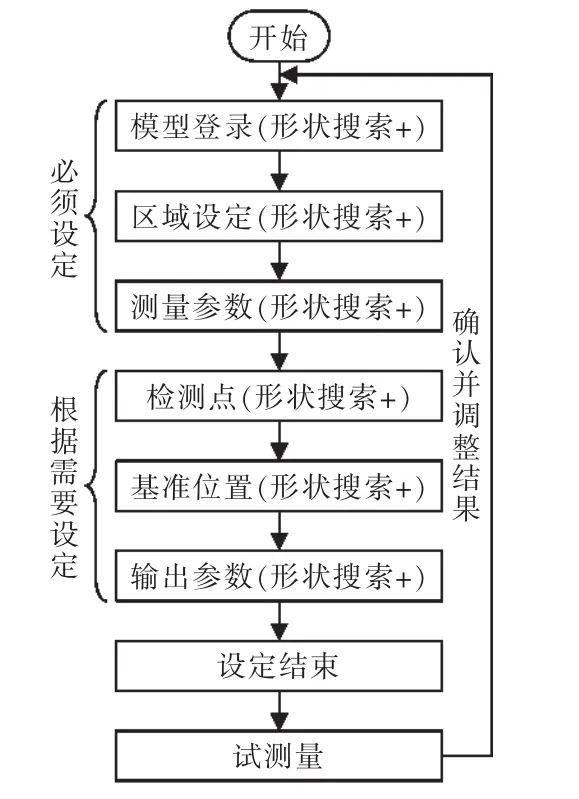
圖3 視覺傳感器“形狀搜索+”的設(shè)定流程Fig.3 Setting flow chart for shape search function of vision sensor
區(qū)域設(shè)定設(shè)定要測量的范圍,通過限制測量區(qū)域,可在短時間內(nèi)進(jìn)行正確測量。
檢測點指定在測量時想將模型的哪個部分作為坐標(biāo)檢測出。通常將已登錄模型的中心位置登錄為檢測點坐標(biāo)。
基準(zhǔn)位置通常將已登錄區(qū)域的中心位置登錄為基準(zhǔn)位置。
測量參數(shù)設(shè)定測量結(jié)果的判定條件。指定相關(guān)值、分類方法和標(biāo)簽編號。
輸出參數(shù)選擇輸出參數(shù),設(shè)定如何處理坐標(biāo)。
2.2 “輸電接觸軌”支架圖像采集控制
2.2.1 不抖動拍攝“支架”設(shè)置
本檢測系統(tǒng)為視覺傳感器快速移動,被攝物體不動,因此拍攝時不抖動一方面要從機械結(jié)構(gòu)解決,另一方面從傳感器功能解決。這里通過縮小快門速度,在HDR模式下將亮度值降低,由于地鐵環(huán)境比較灰暗,需要啟動亮度補償模式。
HRD模式亮度與快門速度調(diào)整結(jié)果如圖4所示,亮度補償模式開始的時序圖如圖5所示。
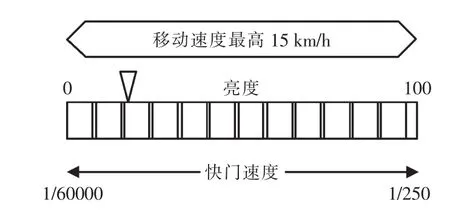
圖4 HRD模式亮度與快門速度調(diào)整結(jié)果Fig.4 Adjustment result of brightness and shutter-speed in the HRD mode
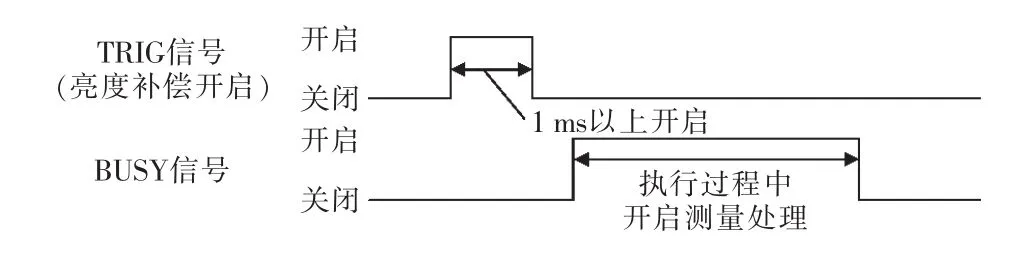
圖5 亮度補償模式開始的時序圖Fig.5 Timing chart for the beginning of brightness compensation mode
2.2.2 觸發(fā)器輸入和拍攝時間
為在正確時間和位置對支架進(jìn)行拍攝,需在支架到達(dá)視覺傳感器正前方位置的瞬間進(jìn)行拍攝。這里選擇的視覺傳感器具有觸發(fā)延遲功能,可在接受觸發(fā)信號(TRIG)后延時拍攝,但因檢測車運行速度不確定,系統(tǒng)需計算車體運動速度與延時時間的關(guān)系,需占用系統(tǒng)CPU較多,且運算速度在觸發(fā)位置和拍攝位置距離較近時可能無法滿足需求,故采用機械可調(diào)式結(jié)構(gòu)來完成觸發(fā)和拍攝之間的協(xié)調(diào),具體方案是將支架識別傳感器與視覺傳感器并排安裝,距離可調(diào),當(dāng)支架識別傳感器識別到支架有效信號時直接觸發(fā)視覺傳感器對支架進(jìn)行拍攝。
2.3 圖像存儲、傳輸和處理
普通視覺傳感器的主體內(nèi)存容量較小,一般僅能存儲最近的幾十張照片,所以通常只保存判斷結(jié)果為NG的圖像,無法滿足保存所有圖像的需求。本系統(tǒng)所采用的視覺傳感器配有多個USB接口,可以外接USB存儲器,極大地擴展了圖像的存儲容量,存儲速度僅為33 ms左右,因而可以將測量過程中的所有圖像進(jìn)行保存;另外視覺傳感器通過用指令的無協(xié)議方式,通過Ethernet使用UDP通信協(xié)議與上位機進(jìn)行通信,將當(dāng)前時間、當(dāng)前的圖像顯示狀態(tài)、圖像數(shù)存入上位機實時和歷史數(shù)據(jù)庫。保存的全部圖像可用于對歷史數(shù)據(jù)進(jìn)行趨勢分析,再根據(jù)接觸軌支架的垂直度變化趨勢,對接觸軌的形變進(jìn)行提前預(yù)判。此外,該圖像傳感器還配有RGB模擬視頻輸出接口,可以實時地將所拍攝的圖像信息顯示在電腦屏幕上,可以即時地對NG圖像的信息進(jìn)行分析。如圖6所示為試驗中實時采集的地鐵輸電接觸軌支架的圖像數(shù)據(jù)。
3 結(jié)語
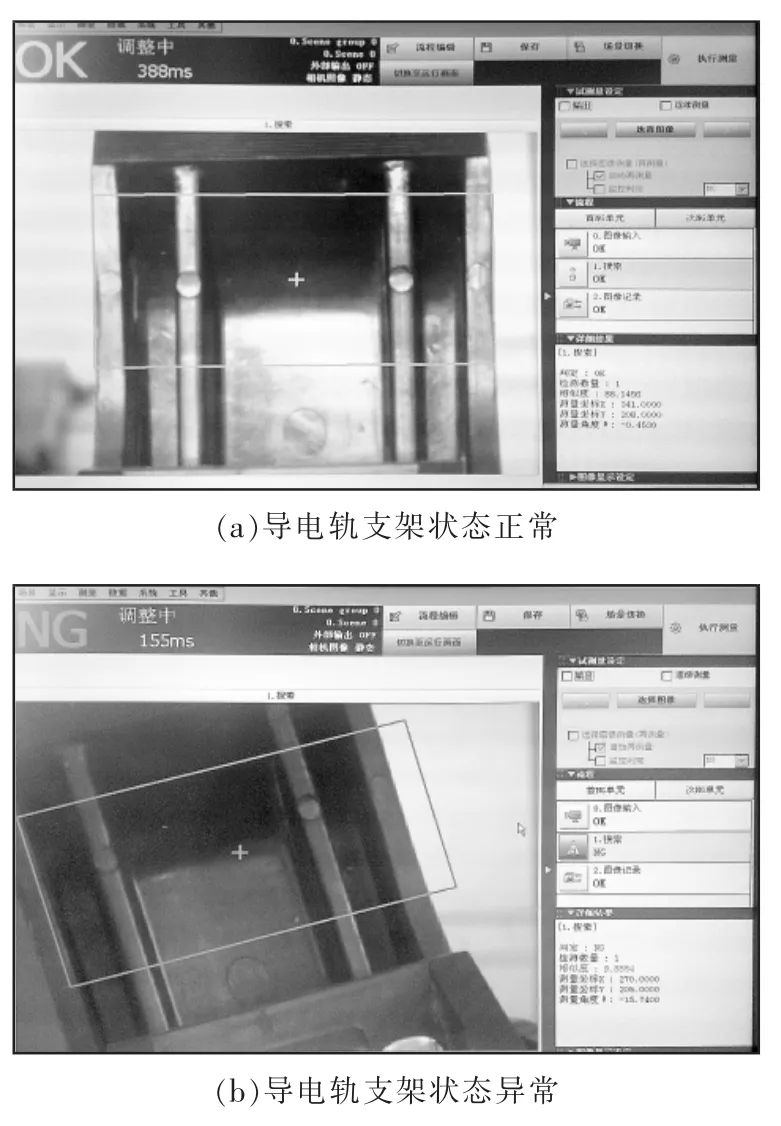
圖6 試驗中實時采集的地鐵輸電接觸軌支架的圖像Fig.6 Image data of subway transmission rail bracket in the test
本裝置的研究提供了一種用于檢測下接觸式地鐵輸電軌受流面直線度及輸電軌“支撐樁”形態(tài)的自動檢測手段,主要針對接觸軌變形導(dǎo)致“支撐樁”異常以及接觸軌結(jié)合處錯位進(jìn)行檢測,用來替代人工行走和肉眼檢測,提高檢測效率和檢測精度。在檢測車上通過視覺傳感器、激光位移傳感器實現(xiàn)輸電接觸軌快捷有效的動態(tài)監(jiān)測,同時記錄地鐵走行軌和輸電接觸軌之間的位置檢測、輸電接觸軌的支架狀態(tài)數(shù)據(jù),實現(xiàn)在線和離線故障診斷。檢測數(shù)據(jù)存入歷史數(shù)據(jù)庫,可離線調(diào)用和分析,可查詢?nèi)我鈪^(qū)域和某一時刻接觸軌受流面的直線度以及任意 “支撐樁”在某一時刻的圖像數(shù)據(jù),以進(jìn)行歷史狀態(tài)比較和趨勢分析,實現(xiàn)狀態(tài)預(yù)測診斷和維護,目前已經(jīng)過實驗室和地鐵導(dǎo)電軌工廠試驗,可以提高地鐵維護維修的管理水平和工作效率。
[1] 龔文濤.鋼鋁復(fù)合接觸軌在廣州地鐵四號線的應(yīng)用[J].都市快軌交通,2007,20(3):82-85.
[2] 李真花.鋼軌斷面高精度動態(tài)監(jiān)測系統(tǒng)設(shè)計[D].北京:北京交通大學(xué),2008.
[3] 宋君義,王顯忠,宋成成,等.接觸軌檢測軌道手推車:CN104029694 [P],2014.
[4] 李立明.基于圖像處理的軌距檢測算法研究[D].上海:上海工程技術(shù)大學(xué),2012.
猜你喜歡
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
小哥白尼(趣味科學(xué))(2021年8期)2021-11-20 06:08:04
中華詩詞(2020年1期)2020-09-21 09:24:52
模具制造(2019年3期)2019-06-06 02:10:54
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36
