基于組態軟件的升降橫移式立體車庫遠程監控系統設計
2015-01-27 06:29:58朱龍彪朱志慧
自動化與儀表 2015年10期
劉 鵬 ,朱龍彪 ,朱志慧 ,王 輝
(1.南通大學 機械工程學院,南通 226019;2.江蘇金冠立體停車系統工程有限公司,南通 226003)
隨著國民經濟的飛速發展,城鎮汽車的保有量也在急劇增加,立體車庫作為解決“停車難”問題的有效途徑得到了廣泛的使用。但目前立體車庫的管理模式還是人工半自動化模式,現場需要專人進行管理和維護,這不僅造成了人員浪費,而且對于大規模的立體車庫,現場管理效率也比較低下[1-2]。為了提高立體車庫的管理效率,實現立體車庫的遠程管理和維護,本文設計了一種基于組態軟件的升降橫移式立體車庫遠程監控系統。該系統通過以太網進行數據和視頻傳輸,避免了布線的不便,節約了通訊成本。
1 升降橫移式立體車庫工作原理
升降橫移式立體車庫主要由金屬鋼結構框架、載車板、驅動系統、控制系統和安全系統等組成,通過載車板的垂直升降和橫向平移將所需停放車輛移動到目標停車位[3]。本文以“單排、三列、五層”升降橫移式立體車庫為研究模型,結構如圖1所示。

圖1 升降橫移式立體車庫模型結構Fig.1 Structural diagram of lift-sliding stereo garage
該立體車庫模型共有11個停車位,其中1~4層各有2個停車位,最高層有3個停車位,其余空位用于1~4層載車板的升降和橫移運動。第1層載車板只能做橫移運動,第5層載車板只能做升降運動,2~4層載車板既能做橫移運動,也能做升降運動。2~5層的每一個停車位均綁定固定的IC卡,用戶通過刷卡方式進行車輛的存取,存取流程如圖2所示。立體車庫所使用電機均為減速電機,帶自鎖功能,載車板不運動時,電機不消耗電能。此外,載車板只在升降運動時通過電磁鐵的吸合實現其安全掛鉤的打開,橫移運動和不運動時,電磁鐵處于斷開狀態,安全掛鉤靠自身重力關閉。綜上,立體車庫在待機時耗能較少,可廣泛應用于住宅小區及企事業單位。
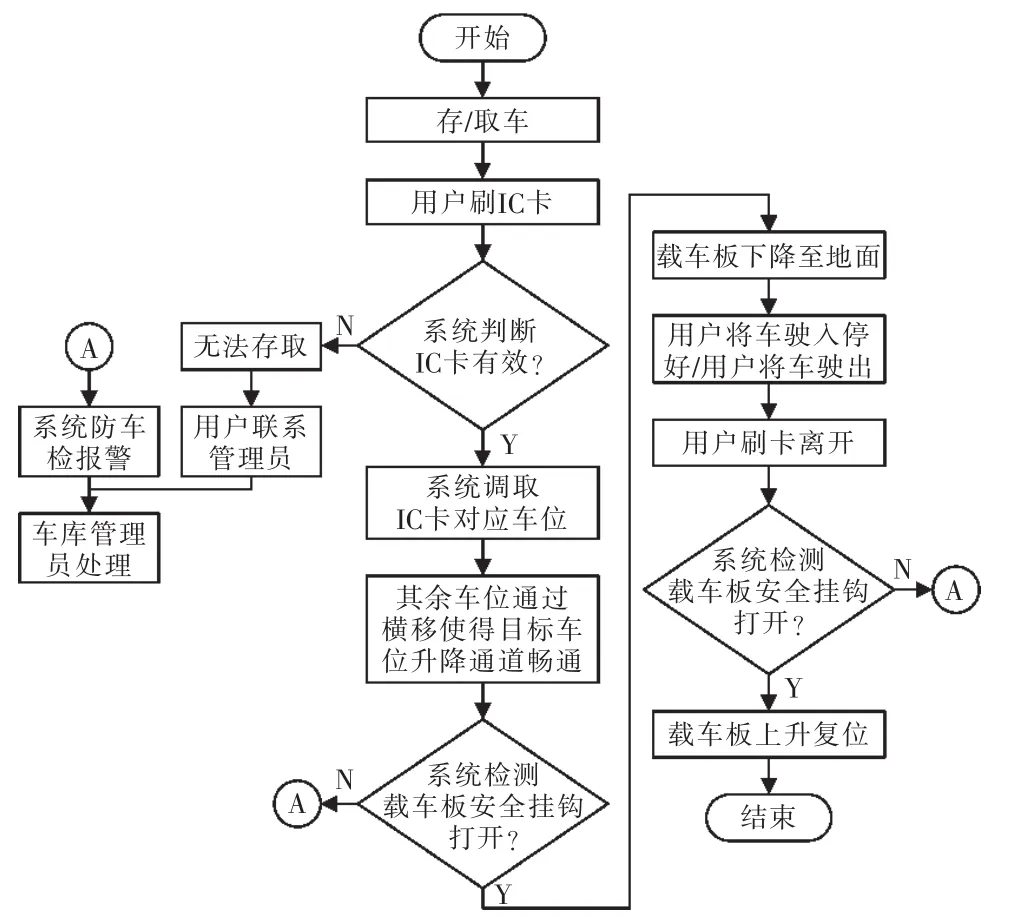
圖2 存/取車流程Fig.2 Flow chart of parking and taking cars
2 系統總體設計
升降橫移式立體車庫遠程監控系統總體結構如圖3所示。監控系統上位機為PC機,安裝力控組態軟件Force Control V7.0,下位機選用歐姆龍CP1E系列可編程邏輯控制器PLC(program logic controller)作為立體車庫的控制核心,對立體車庫中的各種開關量信號,如繼電器狀態、行程開關狀態以及光電開關狀態等進行數據采集與處理。通過電流變送器對立體車庫的減速電機電流進行模擬量采集,經AD轉換,送至PLC進行數據處理。GRM400無線通訊模塊是巨控電子科技有限公司開發的一款專用于PLC遠程維護和監控的通訊模塊。下位機與GRM400無線通訊模塊間采用Hotlink協議進行RS485通信,上位機通過OPC(object linking and embedding for process control)服務器與GRM400無線通訊模塊進行通信,從而實現上位機與下位機間的以太網通信。選用海康威視網絡硬盤錄像機NVR(network video recorder)、智能球型攝像機和交換機完成視頻監控的硬件設計,利用組態軟件中的視頻控件,實現遠程監控系統視頻監控環節的嵌入。
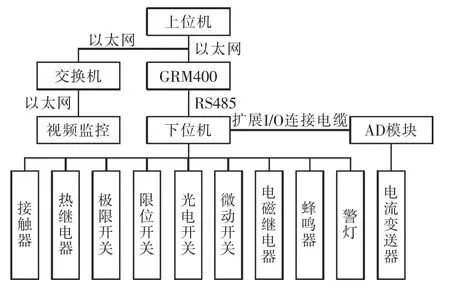
圖3 遠程監控系統結構Fig.3 Structure diagram of remote monitoring system
3 報警系統
升降橫移式立體車庫常見的故障有鋼絲繩故障、限位開關故障、電機故障等,針對這些故障設計的報警系統詳見表1所示。當立體車庫發生報警時,監控系統發出報警鳴音,同時向維護人員發送一條報警短信,顯示報警的位置,類型及說明。對于短信報警,設置有一定的報警延遲,避免了誤報警和假報警。維護人員通過查看系統的報警記錄,詳細了解報警的情況,通過車位監控界面,切換手動工作模式,進行立體車庫的遠程維護。
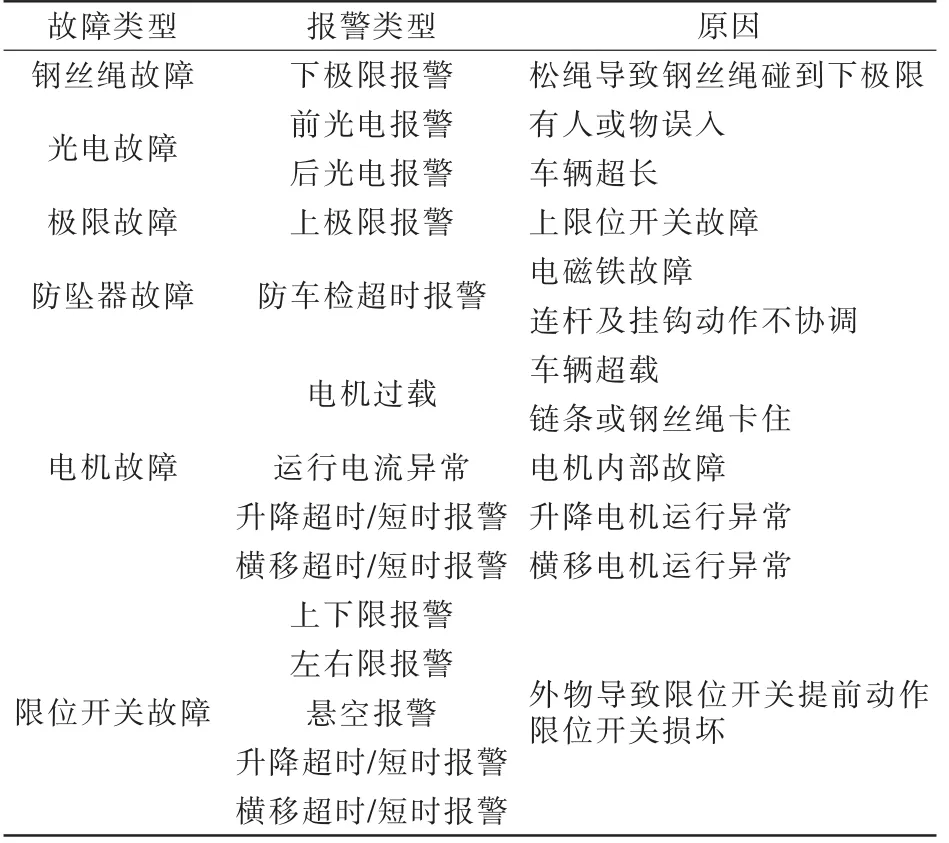
表1 報警系統Tab.1 Alarm system
4 上位機監控系統設計
4.1 通訊設置
通訊分為視頻通訊以及上位機與下位機的通訊兩部分。
視頻通訊部分,將NVR與智能球型攝像機通過網線與交換機相連,NVR系統啟動后設置其內網固定IP地址和端口號,智能球機上電后,需通過SADP軟件進行內網固定IP地址與端口號的設置。為了使外網可以訪問到NVR,需將NVR的服務端口、HTTP端口以及RSTP端口做端口映射。在NVR系統配置UPnP界面中,查看映射狀態是否生效,若某一端口沒有生效,則說明該端口被占用,需更改端口,重新做端口映射。在組態軟件視頻控件中,設置好NVR映射的外網IP地址、端口號以及用戶名和密碼,即可實現上位機視頻監控環節的通訊。
上位機與下位機的通訊以GRM400無線通訊模塊為銜接平臺,通訊的關鍵在于GRM400無線通訊模塊的設置。將GRM400無線通訊模塊的COM1口 (RS485端口)和PLC的RS485選件板CP1WCIF11接口進行連接;將CIF11通訊模塊的DIP SW開關SW4設置為OFF,其他設置為ON,PLC串行端口的單元號設置成和GRM400的從機地址一致,通訊協議選擇歐姆龍的Hotlink協議,通訊波特率為9600,數據位、停止位和奇偶校驗位都選擇默認值;在數據詞典中新建變量,和PLC中I/O存儲器地址關聯即可完成下位機與GRM400無線通訊模塊間的通信。在力控組態軟件的IoManager中,選擇OPC設備并展開,雙擊OPC CLIENT3.6進行設備配置,定義設備名稱,然后OPC服務器選擇GrmOpcServer.GRMOPC,其它選擇默認值。最后在數據庫組態中新建IO點,和GRM400無線通訊模塊中變量進行關聯即可完成GRM400無線通訊模塊與上位機的通信。
4.2 監控界面設計
遠程監控系統上位機監控界面采用力控組態軟件V7.0開發,其開發環境方便、靈活、功能強大、極大地提高了組態的效率[4]。按照監控系統的要求,界面包括車位監控、視頻監控和報警記錄等,界面間的切換通過鼠標左鍵單擊實現。不同的功能賦予相應的操作權限,權限不夠則無法執行相應的操作。
在車位監控界面中,對整個車庫的所有橫移限位開關和上下限位開關進行開關量監測,任何一個限位開關發生故障,都可以方便地判斷出故障的位置;對立體車庫的工作模式進行監控,按照控制要求,需要實現自動和手動2種工作模式的遠程切換以及相應模式下的遠程控制。自動工作模式下,輸入載車板號,按下回車鍵,再單擊啟動按鈕,即可自動取出相應的載車板。手動工作模式用于立體車庫故障時進行調試和應急取車,輸入要控制的載車板號,通過上下左右操作鍵實現其升降橫移動作。視頻監視窗口用于查看現場立體車庫的運行情況,若要調整監視位置或進行視頻錄像,需進入視頻監控界面進行操作。切換自動工作模式需輸入密碼,切換手動工作模式需要相應權限。當前所屬模式,對應信號燈呈閃爍狀態。警燈顯示當前取車狀態,取車運行時,警燈閃爍。車位監控界面如圖4所示。
單擊任一車位號,進入指定車位監測界面,實時監測該車位的安全掛鉤、限位開關以及電機的運行狀態(啟停、轉向和電流值),如圖5所示。采用電流變送器監測的電機的工作電流以趨勢曲線形式實時顯示,若監測值超過設定的報警線,并且持續時間超過報警延遲時間,則產生報警。此外,設計和維護人員通過查詢歷史曲線,對狀態趨勢變化進行分析,進而實現電機的安全評估和故障分析。

圖4 車位監控界面Fig.4 Interface of stall monitoring
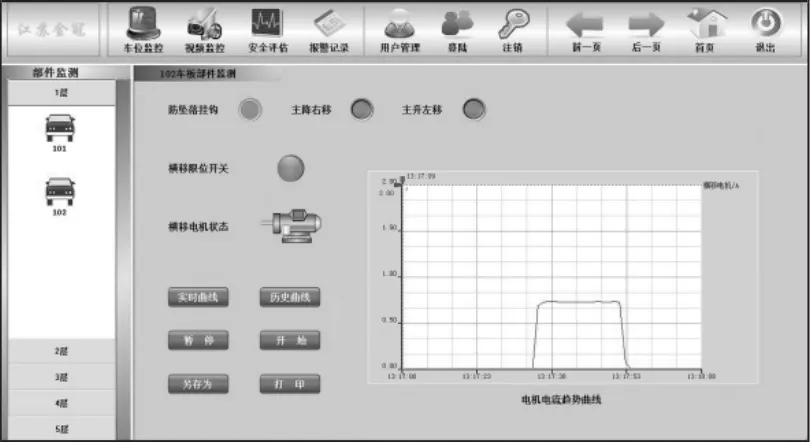
圖5 102車位狀態監測Fig.5 Condition monitoring diagram of No.102 stall
通過復合報警控件創建報警記錄界面,記錄系統運行過程中的實時報警狀態。立體車庫發生報警故障時,報警記錄自動生成一條紅色文字信息,詳細顯示報警的時間、類型、位號等參數,同時播放指定報警音樂;報警信息被確認時,文字顏色變成綠色,同時報警音樂停止播放;報警故障被排除時,文字顏色變成藍色,表示系統恢復正常。通過編寫相應的腳本可以實現查詢歷史、打印和篩選報警記錄的功能,方便維護人員進行故障維修[5]。此外,通過對報警故障的統計分析,發現故障高發部位,便于設計人員改進設計,提高設備運行的穩定性和可靠性。報警記錄界面如圖6所示,力控組態軟件可以儲存30天的監測數據,若要儲存更多數據,需進行數據庫轉存設置。
5 結語
通過組態軟件設計的升降橫移式立體車庫遠程監控系統,實現了立體車庫的遠程控制、狀態監測以及視頻監控,提高了立體車庫的管理效率,減少了維護人員的數量,節約了企業勞動成本。經現場測試,系統運行可靠、實時性好、操作方便。此外,系統采集的數據,也為后期的安全評估提供了保障。
[1]劉美蓮,熊光潔,吳雪.組態技術在立體車庫監控系統中的應用[J].北京工商大學學報:自然科學版,2009,27(4):10-12,16.
[2]田炳,張乃祿.基于GSM技術的立體車庫遠程管理系統[J].微型機與應用,2014,33(4):45-46,49.
[3]劉春麗.升降橫移式立體車庫控制系統的研究[J].機電產品開發與創新,2006,19(3):127-128.
[4]羅啟平.基于PLC和力控組態軟件的中央空調監控系統設計[J].煤炭技術,2012,31(2):53-54.
[5]張運剛,宋小春,郭武強.從入門到精通-工業組態技術與應用[M].北京:人民郵電出版社,2008.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2020年13期)2020-08-24 08:22:02
汽車維修與保養(2019年7期)2020-01-06 03:30:42
制造技術與機床(2017年5期)2018-01-19 02:49:17
家庭影院技術(2017年9期)2017-09-26 03:41:45
濰坊學院學報(2016年2期)2016-12-01 13:00:11
汽車維護與修理(2016年10期)2016-07-10 08:17:41
新聞傳播(2015年11期)2015-07-18 11:15:04
