基于光電編碼器的測速方法研究及實驗驗證
2015-01-27 08:10:41王少君劉永強楊紹普廖英英郝高巖
自動化與儀表 2015年6期
王少君 ,劉永強 ,楊紹普 ,廖英英 ,郝高巖
(1.石家莊鐵道大學 機械工程學院,石家莊 050043;2.河北省交通安全與控制重點實驗室,石家莊 050043)
轉速是旋轉機械的一個重要狀態參數,不同的測速方法測量轉速的精度不同。如何針對工程實際環境選擇高精度的測速方法很重要。本文對光電編碼器常用的測速方法,即:M 法[1]、變 M 法[2]、T 法、M/T法及變M/T法進行了分析、比較;對低速階段適用的T法和不常用的M/T法從原理進行了分析;并搭建軟硬件結合的轉速測量系統,對M法、變M法、變M/T法進行了實驗驗證。分析對比3種測速方法的誤差精度,為以后工程實際轉速測量方法的選取提供參考[3]。
1 基于光電編碼器的幾種測速方法
圖1給出了幾種常用的光電編碼器測速方法,假定fc為高頻時鐘脈沖,P為編碼器的分辨率即轉一圈編碼器發出的脈沖數,M1和M2分別為檢測時間內檢測到的編碼器脈沖和時鐘脈沖的個數。
1.1 M法測速原理
通過檢測一段規定時間間隔內的編碼器脈沖個數來計算轉速。如圖1(a)在規定時間T內測得的編碼器脈沖個數為M1,編碼器每轉一圈發出的脈沖個數為P,轉速為

相對誤差:

當被測轉速較高或脈沖編碼器一圈發出的脈沖數較多時才能有較好的測速精度,測量時最多有1個計數脈沖誤差隨著轉速增大即M1的值增大,相對誤差減小,故M法適用于高速場合。
1.2 變M法測速原理
在M法的測速基礎上,對于正交光電編碼器,產生正交的A、B兩相脈沖同時輸入,相位差90°,并且在脈沖上升沿和下降沿均計數,這樣檢測到光電編碼器輸出脈沖個數如圖1(b)中M1′,為M法中M1的4倍。轉速為

相對誤差:

在變M法中,最多可產生其中一組脈沖中的一個上升沿或下降沿誤差,因此,變M法最大誤差率僅為M法測速誤差的1/4。
1.3 T法測速原理
通過測得相鄰2個編碼器脈沖的時間間隔T來計算轉速。如圖1(c)相鄰2個編碼器脈沖之間時鐘脈沖個數為M2,轉速為

相對誤差:

當被測轉速逐漸增大時,2個相鄰編碼器脈沖之間的高頻脈沖個數即M2變少,導致誤差增大,故T法適用于低速場合。
1.4 M/T法測速原理
M/T法是前2種方法的結合,同時測量檢測時間T和該時間內編碼器產生的脈沖個數M1。如圖1(d)它是用規定時間間隔Tg以后的第一個測速脈沖去終止高頻時鐘脈沖計數器,并由此計數器值來確定檢測時間T。檢測時間T=Tg+t。轉速為

相對誤差:

由于Tg計時和M1計數同時開始,M1無誤差,誤差源于M2計數,高頻脈沖fc遠大于編碼器脈沖,所以M2遠大于M1。但是該方法需要較長的時間來保證結果的準確性,無法滿足測速系統的快速動態響應。
1.5 變M/T法測速原理
變M/T法是為了解決M/T法檢測時間過長而提出,由高頻脈沖M2來計取檢測時間T如圖1(e)所示,轉速為

相對誤差:

此時的M2和M/T法中的M2不同,它不含t時間內的高頻脈沖,可以在很廣的速度范圍內高精度測速,滿足快速響應要求,工作可靠性高。
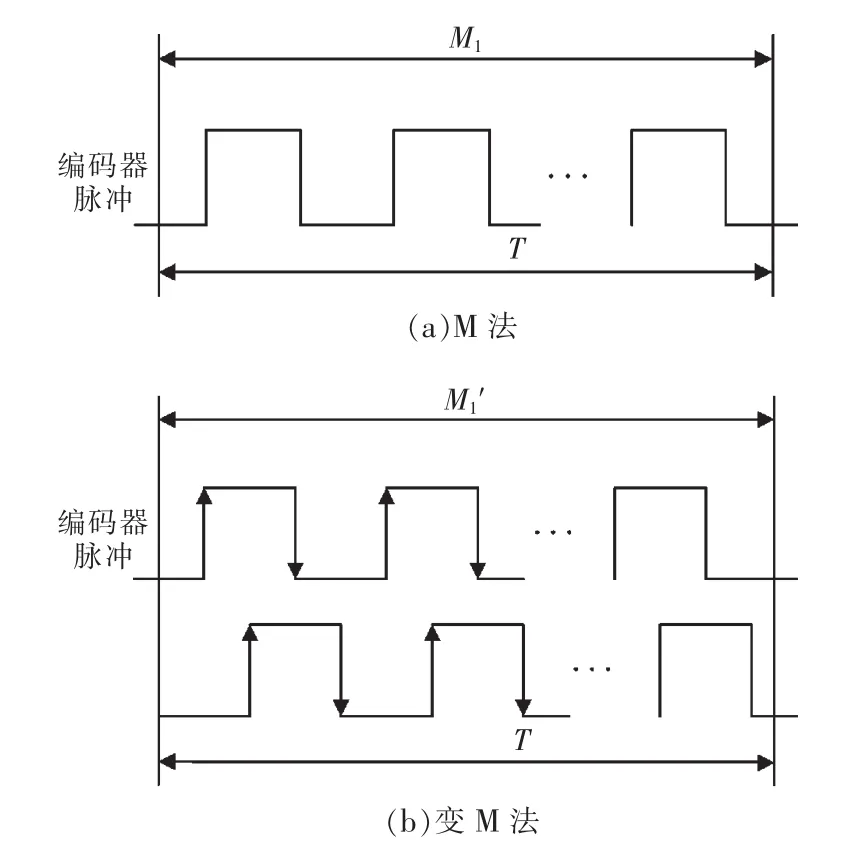

圖1 幾種測速方法原理圖Fig.1 Principle diagram of the speed measuring methods
2 轉速測量系統的設計
本設計采用軟硬件相結合的方式[4-6],運用Lab-VIEW12.0軟件開發平臺和相關硬件設計一個轉速測量系統,系統結構如圖2所示。

圖2 轉速測量系統框圖Fig.2 Block diagram of rotational speed measurement system
2.1 硬件系統的設計
本設計的硬件系統分為5個部分,初步完成信號采集和初步數據濾波等功能。
第1部分采用PCB激光轉速計。它具有可以和標準(ICP傳感器)接口并以單通道方式連接。在1.8 kHz高頻下進行數字采樣相位抖動很小,經FFT平均處理后收斂到225 μs。與采樣相關轉速的均值和準確值均勻分布且精度高,所以每一轉PCB給出一個轉速值的平均值可作為轉速的參照標準。
第2部分采用HTF6015-CY-1024BM/5L增量式光電編碼器。增量式光電編碼器線數為1024,采用梅花鍵式彈性聯軸器與被測軸進行同軸安裝。光電編碼器每轉發出1024個脈沖通過接線盒把數據輸送到IN多功能數據采集卡中。
第3部分采用信號調理器。PCB激光轉速計與信號調理器相連接,主要可以完成信號濾波功能,濾波的同時兼有抗混疊濾波功能,通過信號調理器可以使輸出信號變為標準的電壓信號,輸送到IN多功能數據采集卡中。
第4部分采用IN多功能數據采集卡和與之配套的SCB-68A接線盒,數據采集卡插在PXI機箱當中。本系統采用PXIe-6363多功能數據采集卡,具有4路32位計數器/定時器,可針對PWM、編碼器、頻率計數等等。該采集卡具有測量精度高、速度快、編程簡單、連接方便、無需外接電源等優點,可以很好地完成該實驗的信號采集分析工作。
第5部分采用旋轉機械故障診斷試驗臺。通過變頻電機帶動實驗設備轉動,提供所需測量的轉速。
硬件系統整體支持整個試驗臺運行,PCB激光轉速計和編碼器通過信號調理器和接線盒與多功能采集卡相連從而進行數據采集。
2.2 軟件系統的設計
LabVIEW是一種用圖標代替文本行創建應用程序的圖形化編程語言。它含有豐富的功能函數庫,包括數據采集、GPIB、串口控制、數據分析、數據顯示及數據存儲等。有強大的數據處理功能,可以創造出功能更強的虛擬儀器。

圖3 編碼器轉速測量軟件系統流程圖Fig.3 Program block diagram of encoder rotational speed measurement software system
轉速測量系統的編碼器測速框圖程序如圖3所示,包括數據采集與顯示、數據處理、結果顯示等。首先通過數據采集與顯示模塊對編碼器產生的脈沖進行采集,并以一定的形式在界面上輸出其波形圖;然后,選擇物理通道設置采樣頻率對電壓信號進行采集;最后,通過波形控件顯示出相應的波形。將軟件系統測量的編碼器的數據保存到指定文件夾下,送入Matlab中進行數據處理。
3 實驗結果分析
本實驗通過轉速測量系統,測量了變頻電機在不同頻率變化范圍下的輪對轉軸轉速。將電機轉速按照轉頻分為低速、中速、高速3個階段。低速區選取轉頻為2 Hz,4 Hz,8 Hz;中速區選取轉頻為10 Hz,12 Hz,15 Hz,18 Hz,20 Hz,25 Hz,30 Hz;高速區選取轉頻為 35 Hz,40 Hz,45 Hz,50 Hz。以 PCB 激光轉速計測得的轉速值的平均值作為轉速標準值。將編碼器測得的角度信號按照變M/T法、M法、變M法這3種方法分別計算出轉速值與標準值做相對誤差分析如表1所示。

表1 變M/T法、M法、變M法誤差對比Tab.1 M/T method M method variable M method error contrast
圖4為轉速的相對誤差折線圖,從圖中可知3種方法的誤差變化范圍為0.0002%~0.14%,3條曲線均有先變小后變大的趨勢,因為3種方法均是用于中高速測量的方法,并且隨著轉頻的增大轉軸轉速的波動變化會比較大;在中、高速階段變M法的精度比變M/T法和M法的精度都要高。但整個測速范圍下變M法誤差波動最大,且在實際操作過程中對編碼器的脈沖占空比要求約為50%,應用范圍比較窄;除此之外,在整個速度變化范圍下,變M/T法比M法的測速精度都高。
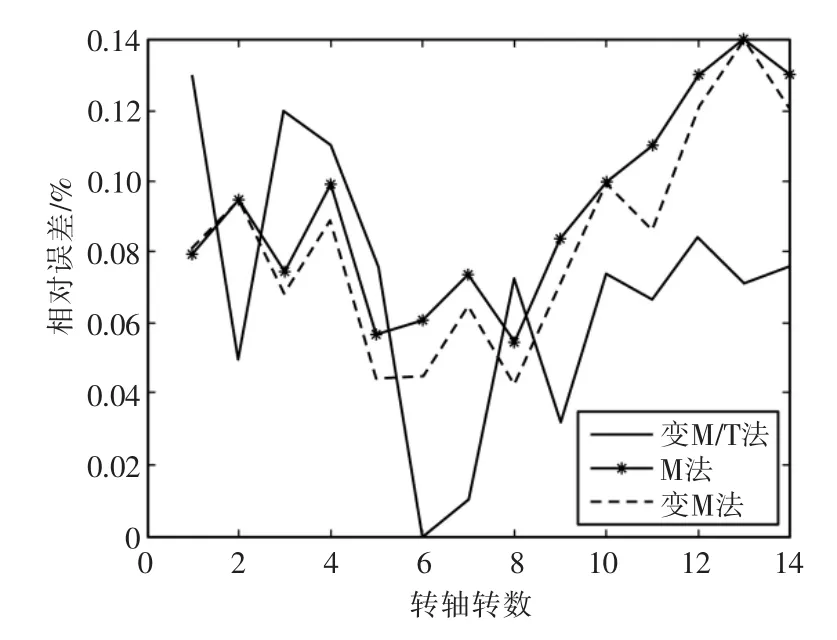
圖4 轉速相對誤差Fig.4 Rotational speed relative error
圖5、圖6和圖7分別選取了中速、低速、高速3種不同工況 下的 170.57 r/min,585.28 r/min,1180.90 r/min這3個速度與作為標準的PCB轉速值進行對比。從這3組圖片結合圖9可得變M法算得的轉速值雖然誤差小,但是變M法所算得的轉速值均在標準轉速值的上方,在實際不同轉速工況下并不適用。而無論是哪種工況下,變M/T法與M法所得到的轉速值相比較,變M/T法計算所得轉速值與標準轉速值最為接近且變化范圍比較小。

圖5 170.57 r/min工況下3種方法轉速對比Fig.5 170.57 r/min,the difference of three methods of rotational speed

圖6 585.28 r/min工況下3種方法轉速對比Fig.6 585.28 r/min,the difference of three methods of rotational speed

圖7 1180.90 r/min工況下3種方法轉速對比Fig.7 1180.90 r/min,the difference of three methods of rotational speed
4 結語
本文設計軟硬件相結合的轉速測量系統,通過實驗驗證的方式,分析對比了變M/T法、M法、變M法3種測速方法在不同轉速情況下的相對誤差。得出結論為隨著轉速從低速到高速變化,轉軸變化由不穩定到穩定再到波動,導致所有的測速方法的誤差產生了先變小后變大的趨勢;變M法測速誤差是3種方法中最小的,但是變M法要求編碼器的脈沖占空比約為50%,適用范圍窄;變M/T法測速誤差較M法測速誤差小,在整個測速范圍內都適用。
[1]趙巖.編碼器測速方法的研究[D].長春:中國科學院研究生院,2002.
[2]焦東升,張秀彬,應俊豪.基于正交編碼器高精度測速方法的研究[J].研究與設計,2010,26(10):13-15.
[3]Hacker J,Kroplin B H.An experiment al study of visual flight trajectory tracking and pose prediction for the automatic computer control of a miniature airship[J].Intelligent Computing:Theory and Applications,2003(5103):25-63.
[4]李南,滕飛.基于LabVIEW的電機轉速控制系統設計[J].計算機測量與控制,2006,14(6):794-798.
[5]李茂亮,高敬貝,賈仁松,等.基于虛擬儀器技術的電機轉速測控系統設計[J].測試技術與檢測設備,2010,37(7):20-24.
[6]姜慶明,楊旭,甘永梅,等.一種基于光電編碼器的高精度測速和測加速度方法[J].微計算機信息,2004,20(6):48-51.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
