一種新型垃圾處理機(jī)械手系統(tǒng)及其智能控制方法
2015-01-27 01:31:10王慰慰
關(guān)鍵詞:分類(lèi)
王慰慰
(國(guó)家知識(shí)產(chǎn)權(quán)局專(zhuān)利局專(zhuān)利審查協(xié)作 廣東中心,廣東 廣州 510530)
0 引言
據(jù)國(guó)家旅游局發(fā)布的《中國(guó)旅游業(yè)統(tǒng)計(jì)公報(bào)》統(tǒng)計(jì),2010 年至2013 年,國(guó)內(nèi)旅游人數(shù)分別為21.03 億、26.41 億、29.57 億、32.62 億,國(guó)內(nèi)旅游人數(shù)的快速增長(zhǎng)一定程度上體現(xiàn)了旅游業(yè)總體的快速發(fā)展。然而,旅游垃圾也隨著旅游人數(shù)的增長(zhǎng)而成正比增長(zhǎng)。以礦泉水瓶、易拉罐、飲料罐(鍍錫鐵)、玻璃瓶為主的瓶罐類(lèi)垃圾是旅游垃圾的主要組成部分之一,均屬于可回收類(lèi)垃圾,而人工將這些瓶罐從旅游垃圾中分揀出來(lái)并進(jìn)行分類(lèi),不僅勞動(dòng)量大,而且效率較低,另外,旅游垃圾中的有害物質(zhì)也會(huì)損害工人的身體健康。故本文提出一種能夠?qū)⑸鲜銎抗迯穆糜卫蟹謷⒆詣?dòng)進(jìn)行分類(lèi)的機(jī)械手系統(tǒng),通過(guò)智能化控制實(shí)現(xiàn)全自動(dòng)地高效作業(yè)。
1 機(jī)械手系統(tǒng)結(jié)構(gòu)設(shè)計(jì)
1.1 機(jī)械手系統(tǒng)整體
如圖1 所示,機(jī)械手系統(tǒng)整體結(jié)構(gòu)主要包括支架1、兩個(gè)機(jī)械手a 和b、傳送帶2、八個(gè)分類(lèi)箱3、八個(gè)分類(lèi)板4。機(jī)械手a 和b 結(jié)構(gòu)相同,均為四自由度機(jī)械手。
支架1 包括4 根支柱1a 和4 根橫梁1b,其中一對(duì)相對(duì)設(shè)置的橫梁1b 上分別設(shè)置有X 向?qū)к?,每個(gè)X 向?qū)к? 上均設(shè)有兩個(gè)X 向滑塊6,四個(gè)X 向驅(qū)動(dòng)氣缸7 分別固定在上述一對(duì)相對(duì)設(shè)置的橫梁1b 的兩端。
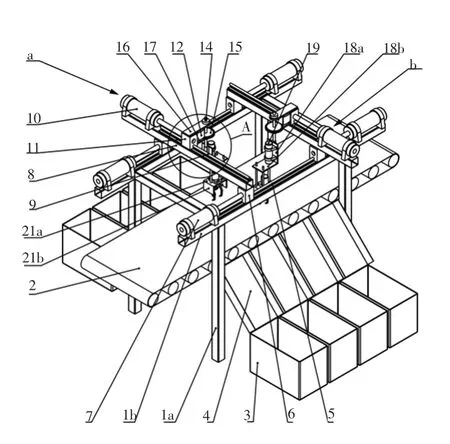
圖1 機(jī)械手系統(tǒng)整體結(jié)構(gòu)Fig.1 The overall structure of the manipulator system
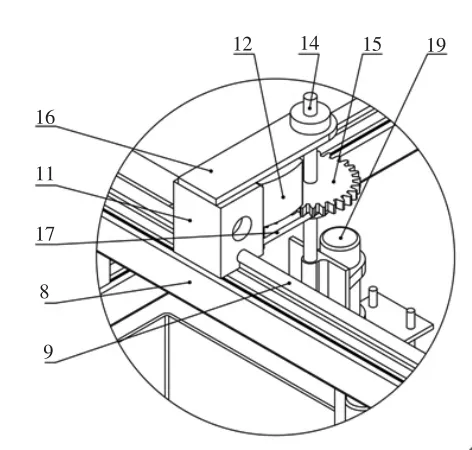
圖2 A 處局部放大圖Fig.2 The enlarged view of A
兩Y 向臂8 與另外一對(duì)橫梁1b 平行設(shè)置,并且每個(gè)Y 向臂8 分別與兩對(duì)應(yīng)X 向滑塊6固接。Y 向臂8 上設(shè)置有Y 向?qū)к? 和Y 向驅(qū)動(dòng)氣缸10,Y 向?qū)к? 上設(shè)置一Y 向滑塊11。
如圖2 所示,Y 向滑塊11 一側(cè)固定安裝有Z 向旋轉(zhuǎn)電機(jī)12,與輸出軸止轉(zhuǎn)連接的齒輪與齒輪15 嚙合,齒輪15 與Z 向旋轉(zhuǎn)軸14 止轉(zhuǎn)連接,Z 向旋轉(zhuǎn)軸14 通過(guò)與Y 向滑塊11 固定連接的上連接塊16 和下連接塊17 而保持。如圖1所示,Z 向旋轉(zhuǎn)軸14 下端與連接座18 的背板18a 止轉(zhuǎn)連接,連接座18 的橫板18b 固接在背板18a 的下端,橫板18b 上固定有Z 向驅(qū)動(dòng)氣缸19,并且設(shè)置有兩個(gè)導(dǎo)向孔。安裝座21 包括頂板21a 和兩支撐板21b,頂板21a 上設(shè)置兩根導(dǎo)向柱。
傳送帶2 沿X 向設(shè)置在支架1 內(nèi),間歇性地輸送旅游垃圾。八個(gè)分類(lèi)箱3 均布在傳送帶2 兩側(cè),分類(lèi)板4設(shè)置在傳送帶2 和分類(lèi)箱3 之間,并且分類(lèi)板4 靠近傳送帶2 的一側(cè)高于與靠近分類(lèi)箱3 的一側(cè),從而在末端執(zhí)行器20 將夾持瓶罐在分類(lèi)板4 上松開(kāi)時(shí),瓶罐在自重作用下滑入對(duì)應(yīng)分類(lèi)箱3。
1.2 末端執(zhí)行器
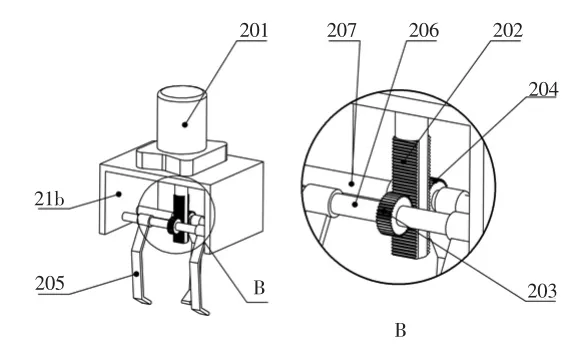
圖3 末端執(zhí)行器及B 處局部放大圖Fig.3 The end effector and the enlarged view of B
如圖3 所示,采用3 根交錯(cuò)設(shè)置的夾爪提高了對(duì)瓶罐夾持的有效性。末端執(zhí)行器包括夾持氣缸201、雙面齒條202、齒輪203 和204 以及三根夾爪205。
夾持氣缸201 的活塞桿與雙面齒條202 一端固接,齒輪203 和204 分別與齒輪軸206 和207 止轉(zhuǎn)連接,齒輪軸206 和207轉(zhuǎn)動(dòng)連接在兩支撐板21b 之間,且齒輪203和204 分別與雙面齒條202 的其中一面嚙合。兩根夾爪205 與齒輪軸206 止轉(zhuǎn)連接,并且位于齒輪203 的兩側(cè),另外一根夾爪205 與齒輪軸207 止轉(zhuǎn)連接,且該夾爪與齒輪204 在齒輪軸207 上的位置相對(duì)應(yīng)。
2 智能控制系統(tǒng)
智能控制系統(tǒng)包括圖像采集模塊、圖像處理模塊、路徑規(guī)劃模塊a 和b、種類(lèi)識(shí)別模塊a 和b、運(yùn)動(dòng)控制模塊a 和b、傳感器模塊。圖像采集模塊由安裝在與Y向臂平行的兩橫梁1b 上的六個(gè)攝像機(jī)a 以及安裝在安裝座21 上的攝像機(jī)b 組成。傳感器模塊包括安裝在各夾爪上的壓力傳感器以及安裝在安裝座21 上的紅外傳感器。智能控制流程如下:
2.1 系統(tǒng)初始化
系統(tǒng)初始化,機(jī)械手a 和b 運(yùn)行至各自的初始位置,并保持初始姿態(tài)。裝有旅游垃圾的傳送帶2 向前運(yùn)動(dòng)一定距離,該距離與兩機(jī)械手在X 向的運(yùn)動(dòng)范圍相等。
2.2 全局圖像采集及瓶罐位姿的確定
首先,六個(gè)攝像機(jī)a 采集傳送帶2 上旅游垃圾的圖像并傳送至圖像處理模塊,通過(guò)分析與計(jì)算,得到工作區(qū)域內(nèi)傳送帶2 上所有瓶罐的位姿信息,并用XiYj(i=1~N,j=1~M,X 表示行,Y 表示列)來(lái)表示瓶罐在傳送帶2 平面內(nèi)的坐標(biāo)值,將瓶罐在傳送帶2 上的坐標(biāo)值從小到大依次排列(首先比較列的大小,列所對(duì)應(yīng)的值越大,則坐標(biāo)值越大,如坐標(biāo)值X3Y2<X2Y3,若列相同,行所對(duì)應(yīng)的值越大,則坐標(biāo)值越大,如X2Y3<X3Y3),將坐標(biāo)值的該排列與對(duì)應(yīng)瓶罐的位姿信息一一對(duì)應(yīng)儲(chǔ)存,并將坐標(biāo)值最小和最大瓶罐的位姿信息對(duì)應(yīng)發(fā)送至路徑規(guī)劃模塊a 和路徑規(guī)劃模塊b。
2.3 夾持運(yùn)動(dòng)路徑規(guī)劃
路徑規(guī)劃模塊a 根據(jù)坐標(biāo)值最小瓶罐的位姿信息以及機(jī)械手a 當(dāng)前的位置及姿態(tài)信息規(guī)劃?rùn)C(jī)械手a 的夾持運(yùn)動(dòng)路徑,并發(fā)送至運(yùn)動(dòng)控制模塊a,控制機(jī)械手a 各向驅(qū)動(dòng)氣缸以及Z 向旋轉(zhuǎn)電機(jī)的運(yùn)動(dòng)。同時(shí),路徑規(guī)劃模塊b 根據(jù)坐標(biāo)值最大瓶罐的位姿信息以及機(jī)械手b 當(dāng)前的位置及姿態(tài)信息規(guī)劃?rùn)C(jī)械手b 的夾持運(yùn)動(dòng)路徑,并發(fā)送至運(yùn)動(dòng)控制模塊b,控制機(jī)械手b 各向驅(qū)動(dòng)氣缸以及Z 向旋轉(zhuǎn)電機(jī)的運(yùn)動(dòng)。
2.4 目標(biāo)瓶罐圖像采集及夾持運(yùn)動(dòng)路徑實(shí)時(shí)修正
機(jī)械手a 和b 開(kāi)始運(yùn)動(dòng),攝像機(jī)a 停止工作,攝像機(jī)b 開(kāi)始工作,實(shí)時(shí)采集目標(biāo)瓶罐的圖像,通過(guò)圖像處理模塊計(jì)算得到所采集圖像中目標(biāo)瓶罐的位姿信息,將該位姿信息與存儲(chǔ)在圖像處理模塊中的位姿信息進(jìn)行比較,并將該誤差輸入模糊控制器,模糊控制器的輸出發(fā)送至路徑規(guī)劃模塊,實(shí)時(shí)調(diào)整機(jī)械手a 和b 的夾持運(yùn)動(dòng)路徑,從而準(zhǔn)確地到達(dá)目標(biāo)瓶罐。
當(dāng)通過(guò)攝像機(jī)b 采集到的圖像識(shí)別出末端執(zhí)行器運(yùn)動(dòng)到目標(biāo)瓶罐處時(shí),運(yùn)動(dòng)控制模塊發(fā)布命令,控制夾持氣缸運(yùn)動(dòng),完成對(duì)目標(biāo)瓶罐的夾持。
2.5 種類(lèi)識(shí)別
當(dāng)夾爪上的壓力傳感器檢測(cè)到夾爪與被夾持瓶罐間的壓力大于預(yù)先設(shè)定的閾值時(shí),運(yùn)動(dòng)控制模塊啟動(dòng)安裝座上的紅外傳感器,紅外傳感器將采集到的數(shù)據(jù)傳輸至種類(lèi)識(shí)別模塊,根據(jù)不同材料對(duì)紅外輻射的吸收程度不同來(lái)識(shí)別所夾持瓶罐的種類(lèi),并將該種類(lèi)信息發(fā)送至對(duì)應(yīng)路徑規(guī)劃模塊。
2.6 分類(lèi)路徑規(guī)劃
路徑規(guī)劃模塊根據(jù)目前機(jī)械手位置以及所夾持瓶罐對(duì)應(yīng)種類(lèi)的分類(lèi)板位置規(guī)劃?rùn)C(jī)械手的分類(lèi)路徑,并發(fā)送至對(duì)應(yīng)運(yùn)動(dòng)控制模塊,控制各向驅(qū)動(dòng)氣缸運(yùn)動(dòng),在將夾持瓶罐的末端執(zhí)行器運(yùn)動(dòng)至對(duì)應(yīng)分類(lèi)箱的分類(lèi)板時(shí),夾持氣缸驅(qū)動(dòng)夾爪松開(kāi),瓶罐在自身重力作用下,由分類(lèi)板滑至分類(lèi)箱,此時(shí)完成一瓶罐從旅游垃圾中的夾持及分類(lèi)。
重復(fù)步驟(2.3~2.6):機(jī)械手在上一瓶罐的松開(kāi)時(shí)位姿信息為下一瓶罐夾持時(shí)起始位姿信息,機(jī)械手a 和b 分別從坐標(biāo)序列的兩端開(kāi)始瓶罐的夾持與分類(lèi),重復(fù)步驟(2.3~2.6),直至將工作區(qū)域中傳送帶2 上的瓶罐全部分類(lèi)完畢。重復(fù)步驟(2.1~2.7):傳送帶2 向前移動(dòng)一定距離,重復(fù)步驟(2.1~2.7)。
3 總結(jié)
本文機(jī)械手系統(tǒng)中設(shè)置兩個(gè)結(jié)構(gòu)相同的機(jī)械手同時(shí)工作,每個(gè)機(jī)械手在三個(gè)方向上的移送均采用氣缸驅(qū)動(dòng),并加入了一轉(zhuǎn)動(dòng)自由度,機(jī)械手的末端執(zhí)行器采用三根交錯(cuò)布置的夾爪。智能控制系統(tǒng)中加入模糊控制,并通過(guò)紅外傳感器快速識(shí)別夾持瓶罐的種類(lèi)。本機(jī)械手系統(tǒng)結(jié)構(gòu)簡(jiǎn)單,響應(yīng)快,便于控制,提高了夾持的有效性。采用上述智能控制系統(tǒng),使機(jī)械手能夠準(zhǔn)確到達(dá)目標(biāo)瓶罐,并實(shí)現(xiàn)自動(dòng)分類(lèi)。本文提出的垃圾處理機(jī)械手系統(tǒng)及其智能控制方法解決了旅游垃圾中瓶罐分揀及分類(lèi)的問(wèn)題,為旅游業(yè)的健康發(fā)展提供了技術(shù)支撐。
[1]周奎.一種新穎的智能型廢品回收機(jī)的開(kāi)發(fā)與設(shè)計(jì)[J]. 機(jī)電設(shè)備,2009,3.
[2]黃宗杰,王富東,楊春暉,馬紅衛(wèi). 一款分揀搬運(yùn)機(jī)器人的設(shè)計(jì)[J].蘇州大學(xué)學(xué)報(bào)(工科版),2010,2.
[3]顏伊慶,潘麗萍. 基于PLC 的自動(dòng)分揀系統(tǒng)[J]. 機(jī)電工程,2011,11.
[4]黃崇莉,劉菊蓉. 分揀機(jī)械手設(shè)計(jì)[J]. 液壓與氣動(dòng),2010,12.
[5]吳清瀟,歐錦軍,都穎明,朱楓. 基于視覺(jué)的煉鐵物料自動(dòng)識(shí)別分類(lèi)系統(tǒng)[J]. 儀器儀表學(xué)報(bào),2011,6.
[6]龐明. 基于智能機(jī)械手的食品分揀系統(tǒng)運(yùn)動(dòng)規(guī)劃研究[J]. 物流技術(shù),2011,5.
[7]方勇純.機(jī)器人視覺(jué)伺服研究綜述[J]. 智能系統(tǒng)學(xué)報(bào),2008,2.
[8]孫洪淋,孫煒,石玉秋,廖繼旺. 基于參數(shù)自校正模糊控制器的機(jī)器人視覺(jué)伺服系統(tǒng)[J].微計(jì)算機(jī)信息,2007,9-2.
猜你喜歡
西北民族大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年4期)2021-12-29 02:54:24
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
小聰仔(科普版)(2020年12期)2021-01-18 09:16:52
東方少年·布老虎畫(huà)刊(2020年4期)2020-06-08 15:48:10
學(xué)生天地(2019年32期)2019-08-25 08:55:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
小天使·一年級(jí)語(yǔ)數(shù)英綜合(2017年11期)2017-12-05 18:49:56
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
