模塊化多維直線運(yùn)動(dòng)機(jī)電平臺(tái)
2015-01-27 01:30:20馬俊林鄭黎明
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新 2015年6期
關(guān)鍵詞:模塊化
馬俊林,沙 歐,鄭黎明
(中國科學(xué)院 長春光學(xué)精密機(jī)械與物理研究所,吉林 長春 130000)
0 引言
光機(jī)電產(chǎn)品在人們的日常生活,在航天航空產(chǎn)品,在工業(yè)生產(chǎn)和檢測中的應(yīng)用越來越廣泛。光機(jī)電產(chǎn)品水平已經(jīng)時(shí)一個(gè)國家工業(yè)基礎(chǔ)能力的重要標(biāo)志之一[1]。調(diào)焦機(jī)構(gòu)作為光機(jī)產(chǎn)品必不可少的功能機(jī)構(gòu),越來越受到人們的普遍重視,它直接影響光測設(shè)備的測量結(jié)果[2]。調(diào)焦或叫對(duì)焦、聚焦是改變鏡頭光心到底片平面的距離以獲得本物體清晰像的調(diào)節(jié)過程。實(shí)現(xiàn)這一功能必須引入直線運(yùn)動(dòng),也就是說需要一個(gè)直線運(yùn)動(dòng)作為該功能的載體。而對(duì)于大多數(shù)獨(dú)立光學(xué)機(jī)構(gòu)來說,直線運(yùn)動(dòng)平臺(tái)是調(diào)焦的主要機(jī)械載體。很多光機(jī)產(chǎn)品不僅需要在一維方向上調(diào)焦,往往需要在二維,甚至三維空間上進(jìn)行調(diào)焦,這樣就需要該直線運(yùn)動(dòng)平臺(tái)不僅可以在一個(gè)方向上做直線運(yùn)動(dòng),也需要在二個(gè)甚至三個(gè)方向上做直線運(yùn)動(dòng)。本文提出的模塊化多維直線運(yùn)動(dòng)機(jī)電平臺(tái),很好的解決了這一問題。該直線運(yùn)動(dòng)平臺(tái)通過電機(jī)、絲杠、直線導(dǎo)軌和滑塊、固定座等電氣組件和機(jī)械元件組成一維直線運(yùn)動(dòng)機(jī)電平臺(tái),并將一位運(yùn)動(dòng)平臺(tái)模塊化,通過滑塊和底座的一體化形成二維,進(jìn)而形成三維運(yùn)動(dòng)機(jī)電平臺(tái),去實(shí)現(xiàn)多維度的直線位移運(yùn)動(dòng),從而實(shí)現(xiàn)多維度的光機(jī)系統(tǒng)的調(diào)焦。
1 一維直線運(yùn)動(dòng)機(jī)電平臺(tái)的實(shí)現(xiàn)
該直線運(yùn)動(dòng)平臺(tái)的設(shè)計(jì)思想是通過器件搭建的思想和方法實(shí)現(xiàn)直線運(yùn)動(dòng)。為了更加方便和可靠的搭建整個(gè)平臺(tái),盡量用可以采購的產(chǎn)品去構(gòu)建,減少相關(guān)機(jī)械件的加工,并盡可能的減少裝調(diào)。本文通過一維直線運(yùn)動(dòng)機(jī)電平臺(tái)的搭建過程詳細(xì)說明整體設(shè)計(jì)思路。
設(shè)計(jì)加工出平臺(tái)底座。在平臺(tái)底座上加工出和直線導(dǎo)軌相配合的凸臺(tái),和電機(jī)組件相配合的安裝孔,和限位開關(guān)安裝位置相配合的安裝孔,還有平臺(tái)的安裝孔等等,如圖1 所示。
選用安裝成套的直線電機(jī)組件。該直線電機(jī)組件包含有直線電機(jī),和電機(jī)已經(jīng)連接為一體的絲杠,和絲杠配套的螺母滑塊,絲杠螺母調(diào)教方式的優(yōu)點(diǎn)是機(jī)構(gòu)簡單成本低[3]。根據(jù)平臺(tái)的精度和回程誤差要求選擇精度相匹配的絲杠和電機(jī)的分辨率。加工出和直線電機(jī)相配合的直線電機(jī)座,并將直線電機(jī)固定在平臺(tái)底板上。加工出和螺母滑塊相配合的滑塊安裝塊,將其和螺母滑塊相連接。

圖1 直線電機(jī)安裝圖Fig.1 Installation of line motor
選用和安裝直線導(dǎo)軌和滑塊。如圖2 所示,根據(jù)導(dǎo)軌的承載和精度選取導(dǎo)軌和滑塊的型號(hào),選取導(dǎo)軌的跨距和尺寸選取滑塊的數(shù)量和大小。將兩組直線導(dǎo)軌和滑塊組件安裝到平臺(tái)底板相應(yīng)的導(dǎo)軌凸臺(tái)位置。
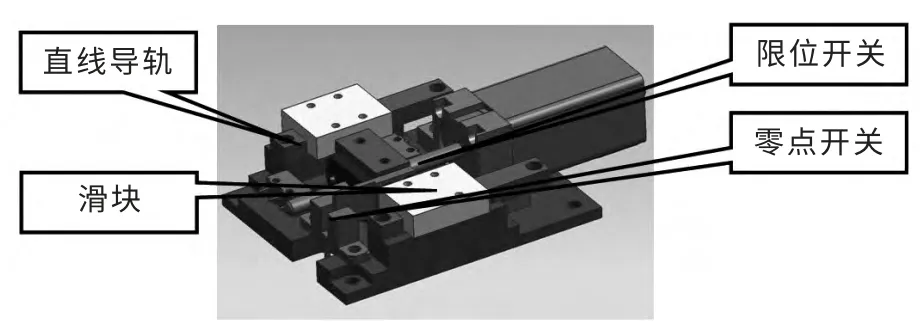
圖2 限位開關(guān)和零點(diǎn)開關(guān)的安裝Fig.2 Installation of limit switch and zero points witch
選用和安裝限位開關(guān)和零位開關(guān)。在滑塊運(yùn)動(dòng)的極限位置安裝兩個(gè)限位開關(guān),在零點(diǎn)位置安裝光電開關(guān)。
設(shè)計(jì)加工出平臺(tái)上板。如圖3 所示,根據(jù)相機(jī)的安裝條件設(shè)計(jì)加工出平臺(tái)上板,平臺(tái)上板和直線導(dǎo)軌滑塊和滑塊安裝塊通過螺釘相連接,這樣就完成了整個(gè)直線運(yùn)動(dòng)機(jī)電平臺(tái)的搭建。
平臺(tái)的運(yùn)動(dòng)原理:電機(jī)的動(dòng)力通過絲杠傳遞給螺母滑塊,螺母滑塊和滑塊固定塊相連接,這樣就把動(dòng)力傳遞給螺母滑塊,進(jìn)而將動(dòng)力傳遞給與螺母滑塊相連接的滑塊固定塊,進(jìn)而將動(dòng)力傳遞給與滑塊固定塊相連接的平臺(tái)上板,再將動(dòng)力傳遞給與平臺(tái)上板相連接的滑直線導(dǎo)軌滑塊機(jī)構(gòu),從而使平臺(tái)上板做直線運(yùn)動(dòng),如圖4 所示。這樣,一維直線運(yùn)動(dòng)機(jī)電平臺(tái)就搭建完畢。將相機(jī)安裝在平臺(tái)上板上,就可以實(shí)現(xiàn)相機(jī)在平行于電機(jī)輸出軸方向上的直線運(yùn)動(dòng),即該方向上的調(diào)焦運(yùn)動(dòng)。
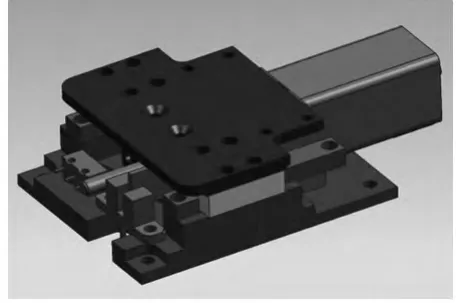
圖3 平臺(tái)上板的安裝Fig.3 Installation of head plate of the platform

圖4 平臺(tái)運(yùn)動(dòng)原理Fig.4 Movement principle of the platform
2 多維直線運(yùn)動(dòng)機(jī)電平臺(tái)的實(shí)現(xiàn)
第一節(jié)實(shí)現(xiàn)了一維直線運(yùn)動(dòng)機(jī)電平臺(tái)的搭建,應(yīng)用廣義模塊化的思想(廣義模塊化思想是具有固定拓?fù)浣Y(jié)構(gòu)的參數(shù)化模塊[4]),采用橫向系類模塊化設(shè)計(jì)方法(不改變產(chǎn)品主要參數(shù),利用模塊化發(fā)展變形產(chǎn)品[5]),只需要將兩個(gè)或者三個(gè)同樣的一維直線運(yùn)動(dòng)機(jī)電平臺(tái)結(jié)構(gòu)在另一個(gè)方向上羅列疊加起來,就可以實(shí)現(xiàn)在該方向的直線運(yùn)動(dòng),進(jìn)而實(shí)現(xiàn)二維和三維直線運(yùn)動(dòng)。
2.1 二維直線運(yùn)動(dòng)機(jī)電平臺(tái)的實(shí)現(xiàn)
為了實(shí)現(xiàn)二維直線運(yùn)動(dòng)機(jī)電平臺(tái),需要將兩個(gè)一維直線運(yùn)動(dòng)機(jī)電平臺(tái)疊加起來。將一維直線運(yùn)動(dòng)機(jī)電平臺(tái)的平臺(tái)上板和另一臺(tái)一維直線運(yùn)動(dòng)機(jī)電平臺(tái)的平臺(tái)底板做成一個(gè)機(jī)械件,即將其一體化,并將電機(jī)的方向垂直交叉就可以實(shí)現(xiàn),如圖5 所示。從圖中可以看出,下面一維直線運(yùn)動(dòng)機(jī)電平臺(tái)的上板和上面一維直線運(yùn)動(dòng)機(jī)電平臺(tái)的底板設(shè)計(jì)加工成了一個(gè)機(jī)械件——連接板。這樣在上面一維直線運(yùn)動(dòng)機(jī)電平臺(tái)的上板上安裝相機(jī),就可以實(shí)現(xiàn)相機(jī)在二維方向上的調(diào)焦功能。
2.2 三維直線運(yùn)動(dòng)機(jī)電平臺(tái)的實(shí)現(xiàn)

圖5 二維直線運(yùn)動(dòng)機(jī)電平臺(tái)Fig.5 Two-dimensions modularity rectilinear electromechanical platform
為了實(shí)現(xiàn)三維直線運(yùn)動(dòng)機(jī)電平臺(tái),需要一個(gè)一維直線運(yùn)動(dòng)機(jī)電平臺(tái)和一個(gè)二維直線運(yùn)動(dòng)機(jī)電平臺(tái)疊加起來。將一維直線運(yùn)動(dòng)機(jī)電平臺(tái)的平臺(tái)上板和二維直線運(yùn)動(dòng)機(jī)電平臺(tái)的平臺(tái)底板做成一個(gè)機(jī)械件,即將其一體化,并將三個(gè)電機(jī)軸線方向形成一個(gè)三個(gè)方向的垂直坐標(biāo)系就可以實(shí)現(xiàn),如圖6 所示。從圖中可以看出,一維直線運(yùn)動(dòng)機(jī)電平臺(tái)的上板和上面二維直線運(yùn)動(dòng)機(jī)電平臺(tái)的底板設(shè)計(jì)加工成了一個(gè)機(jī)械件——垂直連接板。這樣在二維直線運(yùn)動(dòng)機(jī)電平臺(tái)的上板上安裝相機(jī),就可以實(shí)現(xiàn)相機(jī)在三維方向上的調(diào)焦功能。
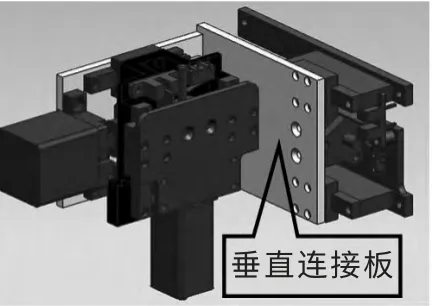
圖6 三維直線運(yùn)動(dòng)機(jī)電平臺(tái)Fig.6 Three-dimensions modularity rectilinear electromechanical platform
3 結(jié)論
本文提出一種模塊化的多維直線運(yùn)動(dòng)機(jī)電平臺(tái)。每一維運(yùn)動(dòng)平臺(tái)通過直線電機(jī),絲杠,直線導(dǎo)軌滑塊和相應(yīng)配合的機(jī)械件組成。應(yīng)用模塊化的思想,將一維移動(dòng)平臺(tái)通過滑塊和底座的一體化形成二維直線運(yùn)動(dòng)機(jī)電平臺(tái),進(jìn)而在形成三維直線運(yùn)動(dòng)機(jī)電平臺(tái),從而去滿足光機(jī)產(chǎn)品在多維度方向上的調(diào)焦功能。當(dāng)然,作為一種獨(dú)立的機(jī)電產(chǎn)品,該多維直線運(yùn)動(dòng)平臺(tái)不僅可以應(yīng)用到光機(jī)產(chǎn)品中,還可以應(yīng)用到任何一種需要直線位移運(yùn)動(dòng)的產(chǎn)品和場合中,來實(shí)現(xiàn)多維度的直線運(yùn)動(dòng)。
[1]劉嬌,等.淺談光機(jī)電一體化技術(shù)及其發(fā)展前景[J].科技向?qū)В?012,30.
[2]劉煥雨,等.圖像法自動(dòng)調(diào)焦原理及系統(tǒng)實(shí)現(xiàn)[J].控制系統(tǒng),2008,24.
[3]王智,等.傳輸型立體測繪相機(jī)的調(diào)焦機(jī)構(gòu)設(shè)計(jì)[J].光學(xué)精密工程,2009,5.
[4]高衛(wèi)國,等.廣義模塊化設(shè)計(jì)原理及方法[J].機(jī)械工程學(xué)報(bào),2007,6.
[5]蔡業(yè)彬,等.模塊化設(shè)計(jì)方法及其在機(jī)械設(shè)計(jì)中的應(yīng)用[J].機(jī)械設(shè)計(jì)與制造,2005,8.
猜你喜歡
海洋信息技術(shù)與應(yīng)用(2022年1期)2022-06-05 07:38:22
裝備制造技術(shù)(2021年2期)2021-07-21 05:38:44
現(xiàn)代裝飾(2020年5期)2020-05-30 13:01:56
汽車與新動(dòng)力(2019年5期)2019-11-07 05:20:16
系統(tǒng)管理學(xué)報(bào)(2018年3期)2018-08-13 01:05:42
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(yè)(2017年4期)2017-06-21 06:29:52
流程工業(yè)(2017年4期)2017-06-21 06:29:50
石油化工建設(shè)(2015年2期)2015-12-01 04:16:44
中國教育技術(shù)裝備(2015年10期)2015-03-01 02:41:05
