
套筒滑動式調焦機構綜合力學性能分析
2015-01-27 01:30:24申軍立張春林王守印
機電產品開發與創新 2015年6期
關鍵詞:設計
申軍立,張春林,王守印
(中國科學院 長春光學精密機械與物理研究所,吉林 長春 130033)
0 引言
在靶場光學測量中,由于目標距離的變化或者環境溫度的改變,光學成像的焦距也隨之改變。為了實現對目標的自動捕獲和連續跟蹤,現代靶場光學測量儀器,大都采用變焦距光學鏡頭的設計形式。調焦機構是實現變焦距鏡頭光學調焦的機械結構,完成光學調焦的執行者,保證目標在鏡頭的光學靶面上清晰成像。在靶場測量環境下,能否保證調焦機構運動平穩、運動精度滿足要求,直接影響目標成像的清晰度、測量精度和跟蹤效果[1]。
根據調焦時電機輸出的旋轉運動轉化為,實現調焦的直線運動的轉化方式不同,調焦機構分為渦輪蝸桿、絲杠螺母、圓柱凸輪等常用形式[2~4]。這幾種調焦機構各有優缺點,一般根據應用場合、精度和成本要求選擇[2,5~7]。隨著對光學鏡頭應用范圍的拓展以及性能指標要求的提高,例如連桿雙滑塊[8,9]等新型調焦機構開始應用。
另外,根據調焦時移動鏡筒的運動形式和摩擦形式不同,調焦機構又分為套筒滑動式、套筒滾珠絲杠式、滑動導軌式以及滑動密珠導軌式等[6,9,10],都是為了實現調焦鏡片沿軸線的滑動。在這幾種調焦機構中,套筒滑動式結構相對簡單,且容易實現,加工和裝調時間短,成本相對較低,在調焦機構中應用普遍。但受運動形式限制,調焦時容易出現驅動力不足和停頓卡滯的問題,導致調焦精度不高,甚至無法完成設定的調焦工作[2,8,10]。多數文獻中提到套筒滑動式調焦機構存在的這一問題,但是很少論述如何解決。
鑒于套筒滑動式調焦機構的調焦優勢以及存在的不足,考慮其機構運動特點,提出運用機構運動學原理,對套筒滑動式調焦機構(以下簡稱套筒調焦機構)進行綜合力學性能分析及精度計算,從受力和運動特點探討結構的設計,以最優化套筒調焦機構,避免出現調焦停頓卡滯等問題,實現其平穩高精度的調焦。
1 套筒調焦機構運動原理分析
套筒調焦機構的機構形式如圖1 所示。一般由直線電機、調焦鏡筒、調焦鏡組、固定鏡筒、CCD(光學傳感器)、電位計、光電開關等組成,這些零部件構成了一個閉合控制回路,如圖2 所示。直線電機驅動調焦鏡筒在固定鏡筒中做往復直線運動,電位計和光電開關可以檢測調焦位置,反饋給控制電路,計算機檢測到位置后,可以發出控制指令,控制電機的開停,實現對調焦機構的調焦位置的控制[7]。
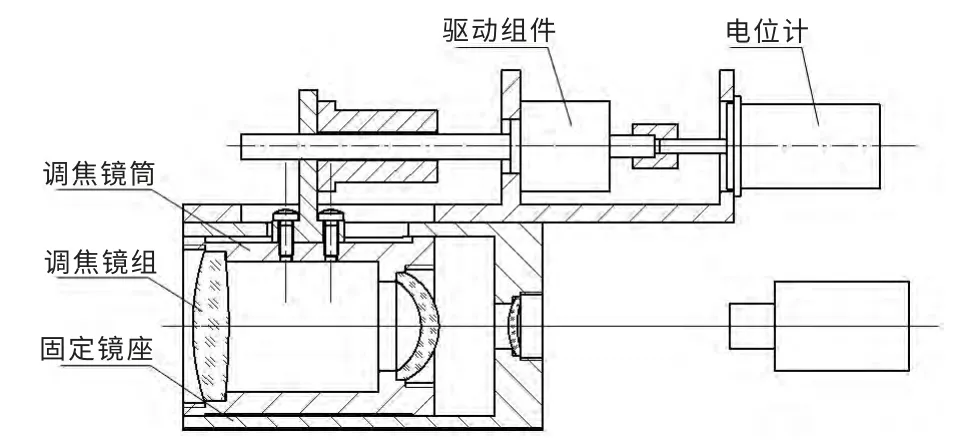
圖1 套筒調焦機構

圖2 套筒調焦機構系統控制原理
針對調焦鏡筒的受力和運動形式,為方便分析,根據機構運動學理論,對機構進行簡化,簡化后的套筒機構簡圖如圖3 所示。從簡圖中可以得知,套筒機構是機械機構中常見的軸套式配合機構,將電機的作用簡化為驅動力FQ,移動鏡筒可以在固定鏡筒中往復運動。
2 套筒調焦機構綜合受力分析

圖3 套筒機構簡圖
對套筒調焦機構進行受力分析,考慮重力的作用,受力分析結果如圖4 所示。分析時考慮兩種極限工況:①移動鏡筒水平運動;②移動鏡筒豎直運動。分析結果如圖4(a)和如圖4(b)。
如果移動鏡筒重力G和驅動力FQ 作用線與移動鏡筒運動幾何中心不重合,將產生傾覆力矩,當傾覆力矩太大時,容易導致調焦鏡筒卡滯,影響調焦的平順性。因此,設計移動鏡筒時一般將二者與移動鏡筒運動中心即幾何中心重合。下面將分別論述兩種工況下的移動鏡筒的靜力學平衡的分析及計算。
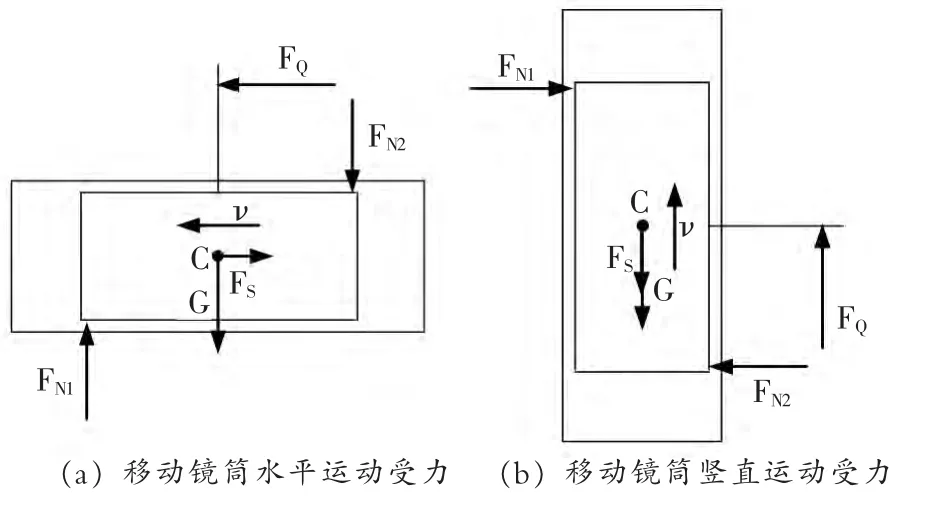
圖4 套筒機構受力分析圖
2.1 移動鏡筒水平運動
由力線平移原理,將驅動力FQ向移動鏡筒的幾何中心C 平移,平移后添加驅動力FQ產生的力矩M,如圖5 所示,并建立如圖的坐標系。圖中附加力矩M=FQ(l+r),移動鏡筒重力G=mg,摩擦阻力FS=μ(FN1+FN2)。對幾何中心C 列平衡方程
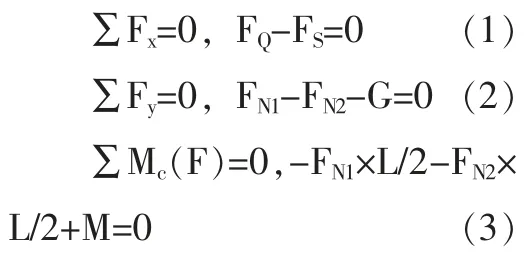
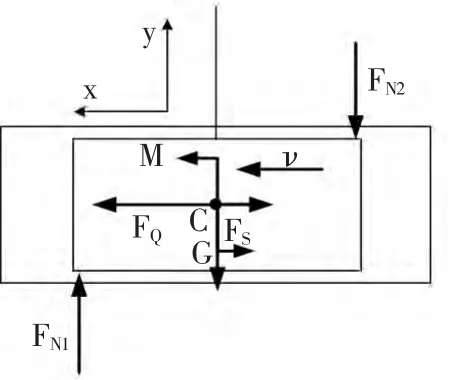
圖5 移動鏡筒水平運動受力分析
式中:l—驅動力作用點到移動鏡筒距離;r—移動鏡筒半徑;m—移動鏡筒質量;L—移動鏡筒長度;μ—移動鏡筒與固定鏡座之間的摩擦系數。由式(2)~(3)可求得:

式(4)代入式(1)后得出調焦機構的設計條件

2.2 移動鏡筒做豎直運動
移動鏡筒做豎直運動式的受力分析與水平運動時相同,分析結果如圖6 所示。移動鏡筒不僅受摩擦力,還有重力的直接作用。豎直向上運動時需要驅動力最大。同樣對幾何中心C 列平衡方程:
由式(7)、式(8)得:

將式(9)代入式(6)可得:


圖6 移動鏡筒豎直運動受力分析
由式(10)可知,L≠μ(r+l),當L≥μ(r+l),L 越大時,驅動力FQ越小,其相關的函數變化曲線如圖7 所示。

圖7 FQ(L)函數曲線示意圖
2.3 調焦精度分析
套筒機構在調焦時,結構裝配誤差與調焦視軸晃動誤差關系為:

式中:δ—套筒機構加工裝配誤差;δθ—套筒機構視軸晃動量誤差。從式(11)可以看出當調焦機構調焦視軸晃動給定時,移動鏡筒軸向越長,對加工和裝配的精度要求越低,加工成本也隨之下降。
2.4 結果分析
經過以上對套筒調焦機構,在兩種極限工況下的機構運動學分析和靜力學計算。移動鏡筒豎直向上運動時,需要驅動力最大,將這種工況作為設計計算工況。根據式(5)、式(10),設計套筒機構時要求移動套筒滿足:移動鏡筒長度不小于驅動力作用點到移動鏡筒運動軸線的距離,即L≥r+l。達到驅動力優化,滿足調焦精度要求。
3 設計計算
根據對套筒調焦機構的設計要求,設計一套調焦機構。設計的移動鏡筒回轉半徑r=51mm,結構長度L=85mm,重量G=10.8N;驅動力作用位置到移動鏡筒距離l=33mm;移動摩擦力μ=0.5。經計算所需要的理論驅動力FQ=21.3N,安全系數取2,因此計算出工程設計電機的有效輸出力為42.6N,通過這個輸出力并考慮運動精度,選擇符合要求的步進電機。
4 結論
綜合以上討論,一般套筒調焦機構在滿足,移動鏡筒長度不小于驅動力作用點到移動鏡筒運動軸線的距離的設計條件下,調焦機構性能進一步提高:驅動力優化,調焦運動平穩無停頓卡滯,運動精度提高,調焦視軸晃動誤差減小。但是,隨著移動鏡筒長度的增加,移動鏡筒的空間尺寸和重力也在增加。因此,移動鏡筒長度要結合結構要求和輕量化設計理念,取最優的設計值。按照這一設計原則,設計的套筒調焦機構,具有更好的機械性能。
[1]林為才,王晶.一種高精度調焦機構設計[J].長春理工大學學報(自然科學版),2010,4.
[2]薛樂堂,陳濤,徐濤,等.一種高精度高可靠性調焦機構設計[J].長春理工大學學報(自然科學版),2012,2.
[3]林為才.經緯儀調焦機構設計[J].光機電信息,2010,12.
[4]楊會生,等.離軸三反空間相機調焦機構設計[J].光學精密工程,2013,4.
[5]陳偉,丁亞林,惠守文,等.推掃式航空遙感器像面調焦機構設計[J].中國光學,2012,1.
[6]李運動,等.中波紅外連續變焦機構設計分析[J].電光與控制,2013,1.
[7]許志濤,劉金國,龍科慧,等.高分辨率空間相機調焦機構精度分析[J].光學學報,2013,7.
[8]賈學志,王棟,張雷,等.輕型空間相機調焦機構的優化設計與精度試驗[J].光學精密工程,2011,8.
[9]付興領,黃曉婧,蘭衛華.一種紅外調焦與變倍共用導向機構的構型設計[J].制造業自動化,2014,2.
[10]占潛. 密珠導軌式光電探測器調焦機構的結構設計與精度試驗[D].長春:中國科學院長春光學精密機械與物理研究所,2014.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
