增加船載雷達位置環(huán)船搖隔離度方法研究
2015-01-28 08:13:48陳小剛李志堅
電子設計工程 2015年17期
陳小剛,李志堅,季 輝
(中國衛(wèi)星海上測控部 江蘇 江陰 214431)
隨著航天事業(yè)逐漸向深空進發(fā),我國測量船已加裝了國內(nèi)首套船載X頻段雷達。目前安裝的船載X頻段雷達的主要特點為作用距離遠,但波束非常窄,只有0.2°左右。如何保證在船搖擾動情況下,X頻段雷達能順利捕獲目標,成為一個需要解決的現(xiàn)實問題。
目前船載雷達中,等待點捕獲方法是目標捕獲重要手段之一。在等待點捕獲過程中,雷達一般工作在位置環(huán)的大地手控工作方式,即以大地系為閉環(huán)坐標系的一種位置增量控制方式。然而傳統(tǒng)的大地手控工作方式船搖隔離度不高,已很難滿足X頻段雷達目標捕獲需求。為了提高設備在等待點捕獲目標的概率,需對大地手控進行改進設計。針對以上問題,本文介紹了在大地手控工作方式中加入反饋陀螺和前饋陀螺來提高船搖隔離度的新方法,并從實用角度進行分析驗證。閉環(huán),通過位置環(huán)PID調(diào)節(jié)向速度環(huán)輸出速度指令,控制天線向預期大地角度轉(zhuǎn)動。
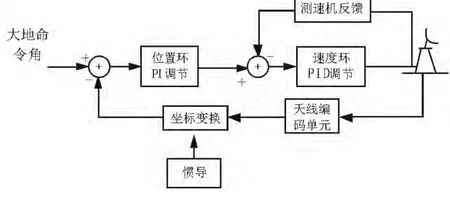
圖1 大地手控方式原理圖Fig.1 The schematic of themanualmodel of the earth coordinate
1 傳統(tǒng)大地手控工作方式介紹
1.1 傳統(tǒng)大地手控工作原理
傳統(tǒng)船載雷達大地手控工作方式是以大地系為基準坐標系的位置閉環(huán)工作方式,其原理如下圖1所示。天線編碼單元實時檢測天線甲板角度,甲板角通過慣導船搖數(shù)據(jù)進行坐標變換,變換成大地角以后與輸入的大地命令角進行位置
1.2 傳統(tǒng)大地手控船搖隔離度分析
由于傳統(tǒng)大地手控位置環(huán)是通過對測角元件測量的甲板角進行坐標變換,然后再與大地命令角進行閉環(huán)控制實現(xiàn),也就是說此種閉環(huán)為位置環(huán)閉環(huán)。這種情況下,船搖信息一般由慣導設備測量并通過網(wǎng)絡傳輸至控制系統(tǒng)。利用船搖角進行坐標變換時,慣導本身的誤差及信息傳輸時帶來的時延及位置環(huán)閉環(huán)自身帶來的系統(tǒng)滯后等問會導致在船搖隔離時系統(tǒng)殘差比較大,根據(jù)以往設備情況,現(xiàn)有大地手控位置環(huán)船搖隔離度約為20 db,船搖隔離殘差較大,窄波束天線捕獲時,目標捕獲比較困難。
2 位置環(huán)船搖隔離新方法
2.1 反饋陀螺法
為增加系統(tǒng)抗擾動性,考慮在位置環(huán)閉環(huán)后端加入反饋陀螺進行陀螺環(huán)閉環(huán)調(diào)節(jié)。如圖2所示。
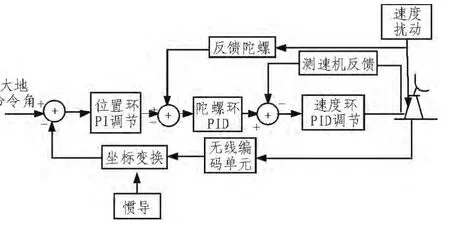
圖2 反饋陀螺法原理圖Fig.2 The schematic of themethod with feedback gyro
本系統(tǒng)使用反饋陀螺是安裝在雷達上分別敏感方位、俯仰運動速率的兩個單自由度光纖速率陀螺,它們的測量值分別為方位和俯仰方向上天線運動速度與船搖擾動速度之和。將測得的速度信息負反饋到回路中,通過閉環(huán)實現(xiàn)船搖隔離。其結(jié)構(gòu)框圖如圖3所示。
其中:N:電機至天線的傳動比;θi:命令角;θ0:天線實際大地角;f:船搖擾動速度;θ1:天線輸出角;θ2:船搖隔離殘差。
系統(tǒng)的總隔離度為:L=Lw+LT
此種船搖隔離度是陀螺環(huán)船搖隔離度與位置環(huán)船搖隔離度之和,因而比單純位置環(huán)的隔離度要高。
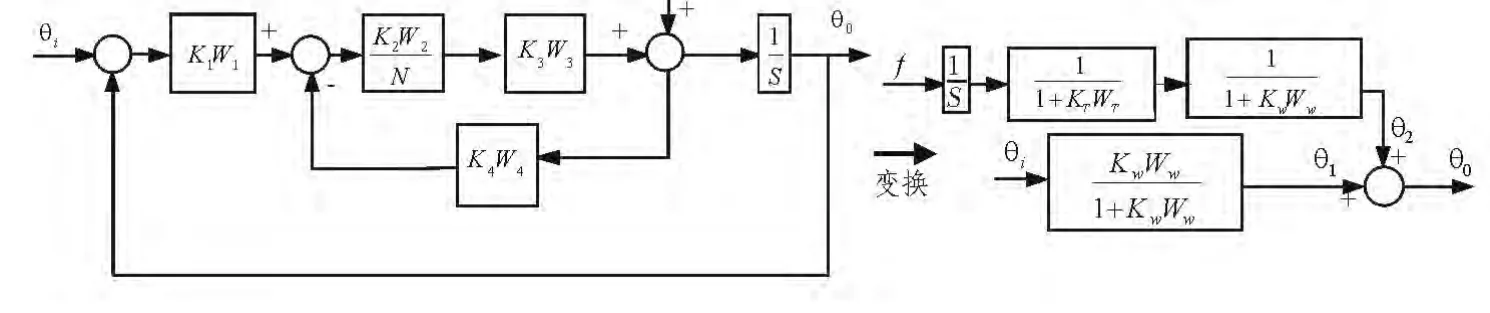
圖3 反饋陀螺的位置環(huán)框圖Fig.3 The transfer function of themethod with feedback gyro
2.2 前饋陀螺法
由于反饋陀螺法中,反饋陀螺的船搖隔離度為LT=20log,隔離度LT的大小取決于KTWT的大小,KTWT越大,則隔離度越大。然而KTWT不能做的很高,且船搖殘差θ2是必定存在,且船搖較大時,船搖殘差也較大。
因此,在船搖擾動較大情況下,本文介紹了另一種船搖隔離方法:前饋陀螺法,其原理圖如圖4所示。
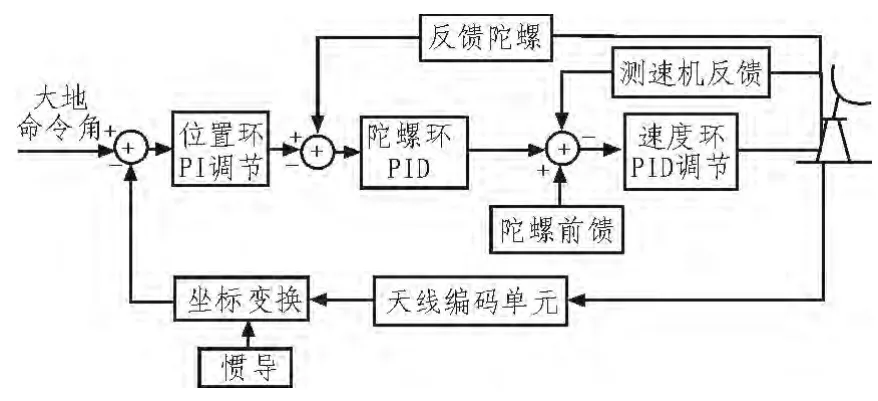
圖4 前饋陀螺法原理圖Fig.4 The schematic of themethod with feedforward gyro
前饋陀螺與反饋陀螺一致,也是單自由度光纖速率陀螺。與反饋陀螺安裝位置不同,可以實現(xiàn)只測量船搖速度在天線方位軸、俯仰軸上分量,其安裝示意圖如圖5所示。
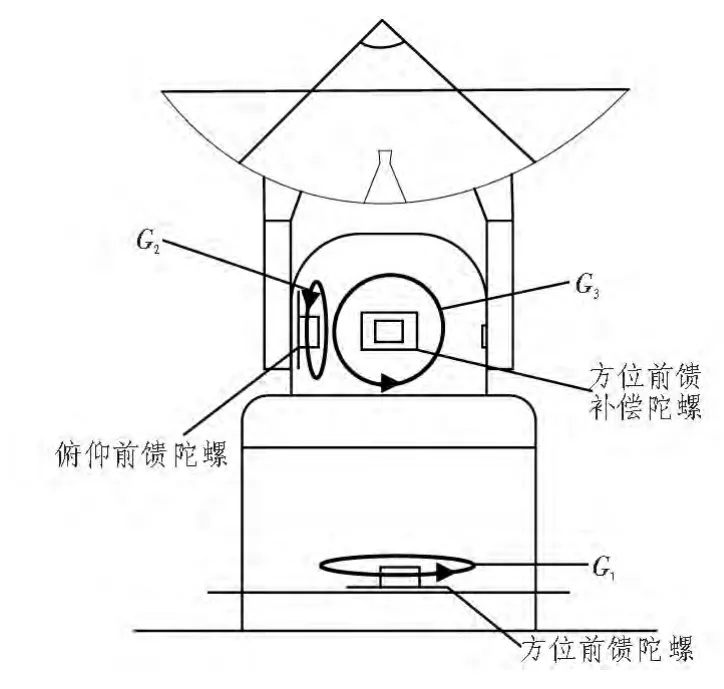
圖5 前饋陀螺安裝示意圖Fig.5 Themounted position of feedforward gyro
圖中G1、G2、G3分別表示各個前饋陀螺感應空間的船搖分量。其中G1為方位前饋陀螺感應船首搖對天線方位的影響;G2、G3分別為俯仰前饋陀螺、方位前饋補償陀螺,主要用于測量在天線轉(zhuǎn)動過程中,橫搖、縱搖在天線方位、俯仰方向上的分量。其中G2為船搖在俯仰方向上的分量,G3為橫搖、縱搖在天線方位上分量的俯仰角余切分量。設橫搖、縱搖在方位上的分量為f′AZ,當前天線俯仰角為 θ,則f′AZ=G3*Tanθ,假設船搖在天線方位、俯仰方向上的分量分別為fAZ、fEL,則:
fAZ=G1+f′AZ,為船搖在天線方位方向上的分量;
fEL=G2,為船搖在天線俯仰方向上的分量。
前饋陀螺應用原理主要是將前饋陀螺敏感船搖在方位、俯仰分量以一定的比例加入伺服驅(qū)動速度環(huán)的輸入端,使天線向減小船搖影響的方向轉(zhuǎn)動,起到隔離船搖擾動的作用。其原理框圖如圖6所示。
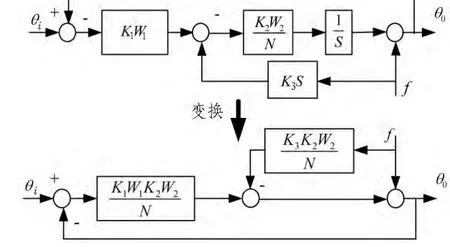
圖6 前饋陀螺原理框圖Fig.6 The transfer function of themethod with feedforward gyro
圖中:K3:前饋陀螺增益補償至速度環(huán),設前饋補償隔離殘差為 Δf,則
上圖表明,船搖f,經(jīng)過由此可知,理論上船搖擾動f可以完全消除,實際應用中這當然是無法實現(xiàn)的,但是通過合理的調(diào)整補償系數(shù)能夠較好地消除系統(tǒng)船搖擾動殘差。
2.3 試驗驗證
根據(jù)以上理論分析,結(jié)合自身天線結(jié)構(gòu)狀態(tài)及設備參數(shù),對大地方式下設備的船搖隔離度進行了理論評估,評估值如表1所示。
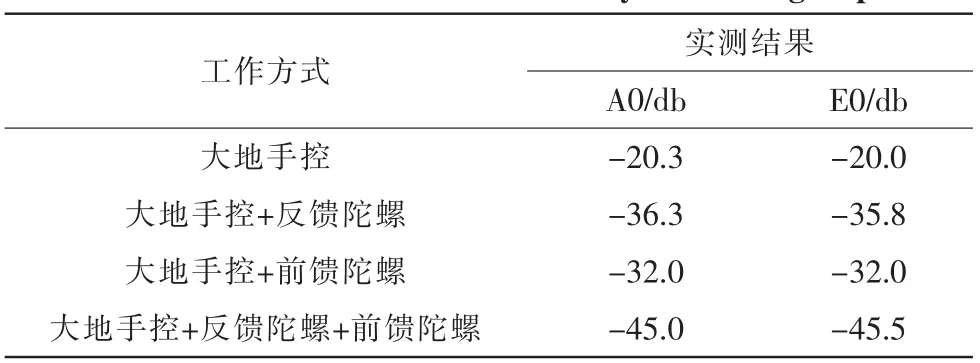
表1 船搖隔離度評估結(jié)果Tab.1 The assessment resu lt of the ability of isolating ship shake
通過對船舶生搖,使得船搖角度達到一定條件(方位、俯仰方向船搖大于10°)進行船搖隔離度測試,測試結(jié)果如表2所示。
從表格數(shù)據(jù)可以看出,無論使用反饋陀螺法,還是前饋陀螺法,系統(tǒng)的船搖隔離度都有所提高,而且在船搖較大時同時使用反饋和前饋能夠很大程度的提升系統(tǒng)船搖隔離性能。
3 結(jié)束語
通過試驗分析,驗證了本文提出的大地手控方式疊加陀螺提高船搖隔離度方法的可行性。以上提出的船搖隔離度方法能夠較好解決窄波束天線在捕獲目標時船搖帶來的擾動問題。在船搖不大時,單獨使用反饋陀螺法就能夠擁有較好的效果。在船搖較大時,在環(huán)路中疊加陀螺前饋補償,能夠較好的隔離船搖。由于前饋陀螺補償法為開環(huán)輸入,容易給系統(tǒng)引進噪聲干擾,船搖較小時不建議單獨使用,在反饋陀螺故障而船搖較大時,可以應急單獨使用。
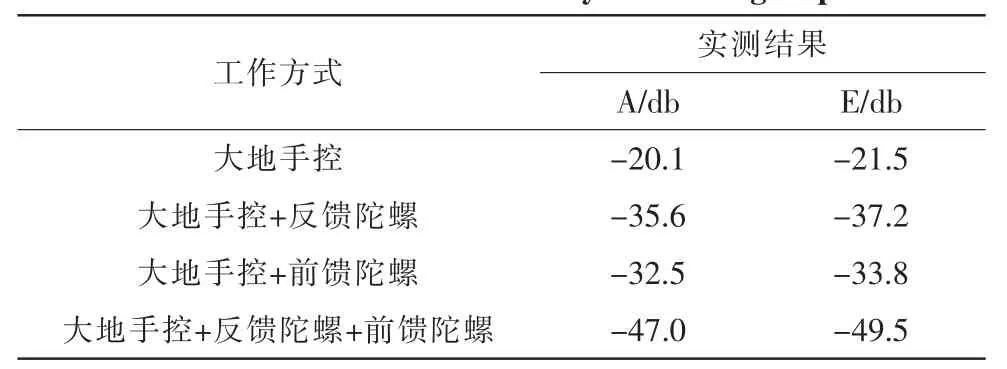
表2 船搖隔離度測試結(jié)果Tab.2 The test result of the ability of isolating ship shake
[1]吳偉仁.嫦娥二號工程X頻段測控技術(shù)[J].中國科學:技術(shù)科學,2013,43(1):20-27.WU Wei-ren.Chang’e 2 project X spectrum measurement and control technology[J].Scientia Sinica Technologica,2013,43(1):20-27.
[2]何榮賢,蔣軍.大型船載衛(wèi)通伺服隨動系統(tǒng)船搖隔離度[J].陜西工學院學院學報,2005(2):8-10.HE Rong-xian,JIANG-Jun.Marine vibrating isolation of the largemarine satellite communication servo system[J].Journal of Shanxi Institute of Technology,2005(2):8-10.
[3]李志堅,周朝猛,劉詠,等.隔離船搖補償新方法[J].科學技術(shù)與工程,2009(19):5736-5738.LI Zhi-jian,ZHOU Chao-meng,LIU Yong,et al.The new technique of isolation and compensation for ship rock[J].Science Technology and Engineering,2009(19):5736-5738.
[4]陸培國,壽少峻.艦載光電系統(tǒng)高精度跟蹤控制技術(shù)[J].應用光學,2006(6):476-483.LU Pei-guo,SHOU Shao-jun.High accuracy tracking technology and its application in ship-borne electro-optical system[J].Journal of Applied Optics,2006(6):476-483.
[5]蔡建軍,周朝猛,王棟良.船載雷達綜合測量精度估算方法及其應用初探[J].飛行器測控,2007(4):19-23。CAI Jian-jun,ZHOU Chao-meng,WANG Dong-liang.Estimation of the compositemeasurement accuracy of ship-borne radars[J].Journal of Spacecraft TT&C Technology,2007(4):19-23.
[6]李連升.現(xiàn)代雷達伺服系統(tǒng)[M].北京:國防工業(yè)出版社,2013.
