基于Adams的圓形物體夾持機械手設計與仿真分析
2015-01-29 02:57:52王春燕秦利明
電子設計工程 2015年13期
王春燕,秦利明,李 軍
(臺州學院 機械工程學院,浙江 臺州 318000)
根據在浙江省第8屆大學生機械設計競賽中的實際要求,需分別將直徑30 mm、直徑60 mm和直徑120 mm,長度為100 mm的3種規格圓棒物體從固定位置取出,并放置到特定的位置。在競賽作品實際制作過程中,發現難以用一種尺寸規格的機械手將3種不同尺寸的圓棒料物體夾持取出放入特定位置,在不斷總結試驗的過程中,創新性的應用了倒V型和X型組合而成的機械手,通過adams仿真分析及實物制作驗證,實現了多種尺寸圓柱物體的精確抓取。
1 常用夾持機械手介紹
機械手是模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置。在競賽機器人中,機械手的應用廣泛,常用的有氣壓傳動機械手及機械傳動機械手兩類。氣壓傳動機械手是以壓縮空氣的壓力來驅動執行機構運動的機械手,其主要特點是需要由壓縮機來提供動力,并具有結構簡單、工作范圍小、體積小以及效率高等優點,如圖1所示;而機械傳動式機械手是由機械傳動機構,如凸輪、連桿、齒輪和齒條、間歇機構等組成,主要特點是需要電機來提供動力,其結構復雜,雖運動準確可靠,但結構較大,如圖2 所示[1-2]。

圖1 氣動機械手Fig.1 Pneumatic manipulator
2 圓柱物體夾持機械手工作原理及夾持能力分析
2.1 工作原理

圖2 機械傳動式機械手Fig.2 Mechanical drive manipulator
針對競賽中要求夾持的圓柱物體的尺寸相差較大 (直徑相差90 mm),常用的機械手一般難以同時滿足3種尺寸物體的夾持工作,且由于賽程的時間限制,這便要求所設計的機械手可同時滿足3種物體的夾取,且需快速穩定,盡量節省操作時間。綜合以上方面的要求,文中采用了倒V型和X型組合而成的機械手,如圖3所示[3-4]。

圖3 adams建模下的機械手及目標物體Fig.3 Robot and the target object modeling under adams
2.2 夾持能力分析
圖3 所示的機械手,通過調節短連桿和長連桿尺寸,可實現多種規格目標物體的夾持動作。在夾持過程中,通過更換合適的彈簧和收縮電機,即可滿足不同質量物體的夾取要求。
3 機械手仿真分析
首先在adams中建立機械手實體模型,之后設置該機械手各相關參數,并對模型添加約束及相互構件間的運動關系,添加彈簧且設置彈簧的剛度系數和阻尼系數,彈簧所受到的預載荷及所受預載荷時彈簧長度。同時,針對競賽要求中3種尺寸的圓柱物體進行運動仿真分析,以期望得到機械手正常運行時的合理參數。
在彈簧各參數設置相同的情況下,分別針對3種尺寸圓棒料夾取時受力情況及運動軌跡進行分析,并利用虛擬樣機技術檢驗了方案的可行性[5-6]。
3.1 三種物體運動狀態下受力分析
機械手在夾持物體時,主要是通過彈簧的回復力實現圓柱物體的夾持動作,在設計該機械手過程中,將抓取最小物體所需的初張力大于圓柱物體所受到的重力,即可將目標物體抓取成功。拉力彈簧的初張力等于適中拉開互相緊帖的彈簧并圈所需的力,初張力在彈簧卷制成形后發生。拉力彈簧初張力計算公式如下:
初張力=P-(K×F1)
其中:P——最大負荷;
K——彈簧常數;
X——拉伸長度;
本設計中,是將彈簧的初張力應用于產品的設計中,在下面的仿真分析中,挾持目標物體所受到的力等于負初張力(所受力與初張力相關)。

圖4 直徑30 mm圓柱物體夾持過程中受力情況Fig.4 30 mm diameter cylindrical body of the forces holding process
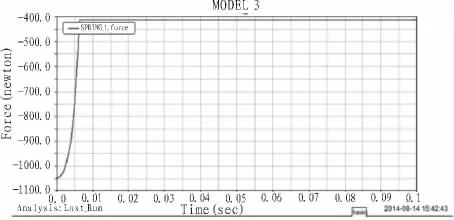
圖5 直徑60 mm圓柱物體夾持過程中受力情況Fig.5 60 mm diameter cylindrical body of the forces holding process
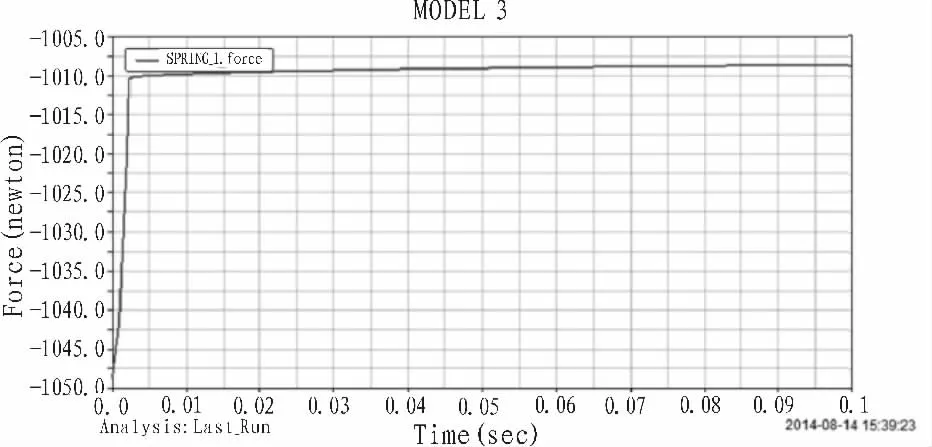
圖6 直徑120 mm圓柱物體夾持過程中受力情況Fig.6 120 mm diameter of the cylindrical body the forces holding process
通過以上分析,3種物體在被夾持過程中所受到的彈簧力均與其直徑尺寸成正比。且直徑越大,所受到彈力就越大。
3.2 三種物體運動狀態下質心運動軌跡分析
分析圖7~9可以知道,物體在夾持過程中,隨著彈簧力的增大,會有輕微的位移。而此位移大小對實際的影響可忽略不計[7-9]。
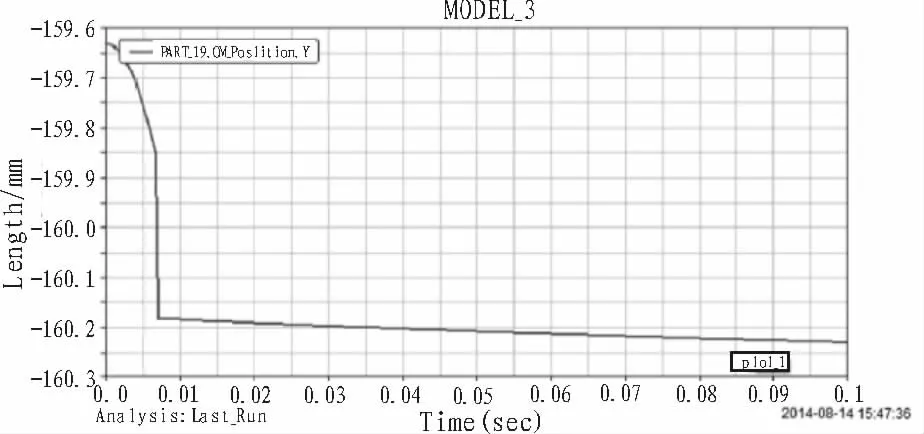
圖7 直徑30 mm圓柱物體夾持過程中受力情況Fig.7 30 mm diameter cylindrical body of the forces holding process
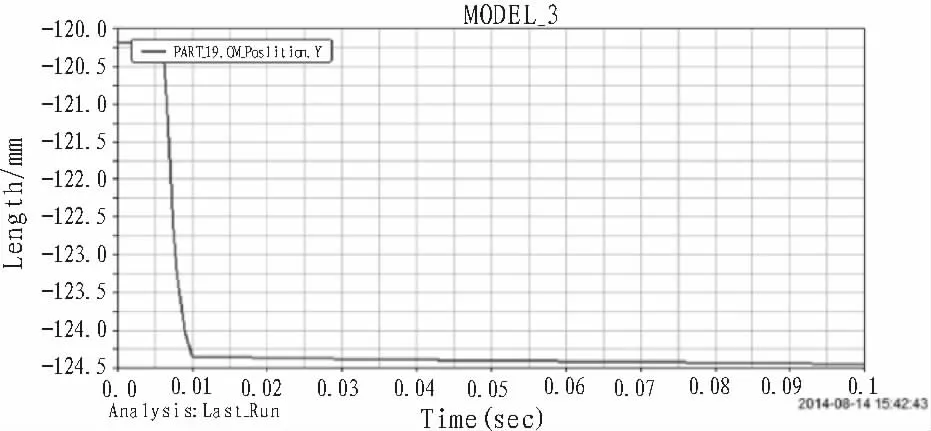
圖8 直徑60 mm圓柱物體夾持過程中受力情況Fig.8 60 mm diameter cylindrical body of the forces holding process

圖9 直徑120 mm圓柱物體夾持過程中受力情況Fig.9 120 mm diameter of the cylindrical body the forces holding
所以,在此分析的基礎上,文中制作了實物樣機,如圖10所示。

圖10 樣機夾持直徑120 mm圓柱物體Fig.10 120 mm diameter cylindrical object prototype clamp
4 結束語
根據本文的仿真分析數據,文中制作了實物樣機,并在競賽過程中取得了優異的成績。在仿真分析過程中可發現,使用此結構機械手,通過選擇合理的連桿長度及彈簧,其可夾持的物體尺寸有較大程度的變化,且此機械手仍可保持較高的夾持精度。
[1]王世明,陶柯.基于Adams的4R機械手生產參數仿真研究[J].裝備制造技術,2014(1):131-132.WANG Shi-ming,TAO Ke.Based on the production parameters Adams 4R robot simulation[J].Equipment Manufacturing Technology,2014(1):131-132.
[2]王柯,周驥平.高速板材搬運機械手的動力學仿真研究[J].機械設計,2014(1):12-15.WANGKe,ZHOU Ji-ping.Kinetic speed plate handling robot simulation[J].Mechanical Design,2014(1):12-15.
[3]文懷興,柳建華,魯劍嘯.基于Adams的夾持機械手虛擬設計及其結構優化[J].機械設計與制造,2010(3):75-77.WEN Huai-xing,LIU Jian-hua,LU Jian-xiao.Adams gripping robot based virtual design and structural optimization[J].Mechanical Design and Manufacturing,2010(3):75-77.
[4]楊文寧,朱佳俊,王偉良,等.機器人機械手協調控制系統設計[J].高校實驗室研究,2012(1):115-116.YANG Wen-ning,ZHU Jia-jun,WANG Wei-liang,et al.Coordinated robot manipulator control system design[J].Laboratory Research Universities,2012(1):115-116.
[5]陳立平,張云清,任衛群.機械系統動力學及ADAMS應用教程[M].北京:清華大學出版社,2005.
[6]MSC.Software.MSC.ADAMS/View高級培訓教程[M].北京:清華大學出版社,2004.
[7]王莉莉.基于PLC控制的氣動搬運機械手系統設計[J].電子科技,2013(4):50-52.WANG Li-li.Pneumatic handling robot system design based on PLC control[J].Electronic Science and Technology,2013(4):50-52.
[8]梁新平.基于PLC的自動線機械手位置控制系統設計[J].電子設計工程,2014(7):86-87.LIANGXin-ping.Design automatic line robot position control system based on PLC[J].Electronic Design Engineering,2014(7):86-87.
[9]李祥陽,陳萬強,曹海泉,等.穿銷機械手的PLC控制的硬件設計[J].電子設計工程,2014(1):54-55,59.LI Xiang-yang,CHEN Wan-qiang,CAO Hai-quan,et al.Wearing a pin PLC control robot hardware design[J].Electronic Design Engineering,2014(1):54-55,59.
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2018年18期)2018-11-14 01:48:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06