基于PID控制的礦井通風機自動監(jiān)控系統(tǒng)研究
2015-02-04 22:32:58曹帥劉混舉
科技與創(chuàng)新 2015年1期
曹帥+劉混舉
摘??要:礦井通風機是煤礦通風系統(tǒng)的主要設備之一。通過結合煤礦生產(chǎn)的需要和礦井通風機自動監(jiān)控系統(tǒng)的結構,提出了以PLC和組態(tài)技術為核心的控制系統(tǒng),并引入了二自由度的PID控制理論。通過Matlab/Simulink動態(tài)仿真對礦井通風機自動控制系統(tǒng)進行參數(shù)控制,可實時監(jiān)測并讀取通風機的風速、風量、電流和溫度等參數(shù),且具有良好的預警功能,對企業(yè)實時掌握風機工況有重要的意義。
關鍵詞:礦井通風機;監(jiān)控系統(tǒng);PID;Simulink
中圖分類號:TD441;TP277???????文獻標識碼:A???????????????DOI:10.15913/j.cnki.kjycx.2015.01.008
礦井通風機是煤礦井下通風必不可少的安全設備之一,在煤礦安全生產(chǎn)中扮演著重要角色,有煤礦“肺臟”之稱。其主要作用是向礦井內(nèi)輸送新鮮空氣,同時,將煤礦內(nèi)瓦斯、粉塵等有害氣體排出。因此,礦井提升機的安全、可靠運行對提高煤礦的生產(chǎn)效率有重要意義。本文在總結以往礦井通風機自動監(jiān)控檢測系統(tǒng)研究的基礎上,進行了基于PID控制的礦井通風機監(jiān)控系統(tǒng)的設計和試驗仿真工作。
1??礦井通風機自動監(jiān)控系統(tǒng)
1.1??自動監(jiān)控系統(tǒng)的結構
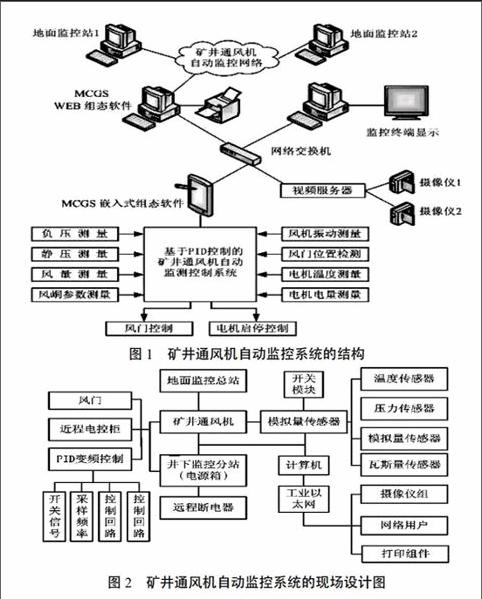
礦井通風機自動監(jiān)控系統(tǒng)利用了微機技術、傳感器技術、可控制理論技術和網(wǎng)絡傳輸通訊技術,監(jiān)測參數(shù)項目較全,且基于生產(chǎn)部門的計算機通信網(wǎng)絡,可實時監(jiān)測礦井通風機的運行參數(shù)。礦井通風機自動監(jiān)控系統(tǒng)的結構如圖1所示,主要由西門子PLCS7-200PLC為核心的控制系統(tǒng)、MCGS組態(tài)操作軟件、PID控制、PID參數(shù)整定和操作人員控制模塊等部分組成。
1.2??自動監(jiān)控系統(tǒng)的現(xiàn)場設計方案
礦井通風機自動監(jiān)控系統(tǒng)可實現(xiàn)礦井相關參數(shù)的實時監(jiān)控,并可有效監(jiān)控礦井內(nèi)、外的實際工作。該系統(tǒng)將礦井監(jiān)測與礦井控制兩部分的功能有機結合,整體結構采用上、下位機分布式結構。上位機為工業(yè)計算機,應用軟件采用冗余組態(tài)軟件技術,從而使系統(tǒng)更加安全、可靠;下位機部分由傳感器、A/D模塊和PLCS7-200PLC組成。上、下位機通過工業(yè)以太網(wǎng)交換數(shù)據(jù),測控功能更加網(wǎng)絡化、實時化,且依據(jù)不同礦井的需求,可實現(xiàn)系統(tǒng)的靈活配置。
該自動監(jiān)控系統(tǒng)具有運行穩(wěn)定、控制效果好、實時性高、安全性高、人機交互性強和操作方便等優(yōu)點。礦井通風機自動監(jiān)控系統(tǒng)的現(xiàn)場設計圖如圖2所示。
圖1??礦井通風機自動監(jiān)控系統(tǒng)的結構
圖2??礦井通風機自動監(jiān)控系統(tǒng)的現(xiàn)場設計圖
2??基于PID控制的系統(tǒng)模型
由于傳統(tǒng)的PID控制器只能在跟蹤設定值或抑制擾動中選擇一種設計,很難獲得最佳的控制效果。本文依據(jù)?str?m和Panagopoulos?等學者的PID控制思想,通過分析非線性魯棒控制器(Tornambe?Controller,TC)的結構,推導得出了PID的等價形式。通過設計預期動力學方程系統(tǒng),將本文所采用的控制方式反映至控制器參數(shù)中,同時,提出一種二自由度PID預期動態(tài)法(Desired?Dynamic?Equation,DDE)。在該方法中,在不具備精確模型的前提下,也可通過在線整定適應監(jiān)測對象的未建模動態(tài)過程,具有較強的魯棒性。因此,采用二自由度PID結構確定了閉環(huán)系統(tǒng)的最大靈敏度,并優(yōu)化了整定PID/PI參數(shù)。對于單輸入、單輸出系統(tǒng)(SISO)而言,被控對象可近似表示為:
. ????(1)
式(1)中:Gp'(s)為被控對象的近似值;H為高頻增益;b為方程系數(shù),未知數(shù);n為極點數(shù)量;r為階次;a為方程系數(shù),未知數(shù)。
根據(jù)式(1)設計了一種新型的PID控制器,設A,B,C為系統(tǒng)的最小能控,可采取如下變換:
. ?????????(2)
式(2)中:zi為擴變量;wi為擴變量。
通過一系列的轉換后,最終得到二自由度PID的控制率:
.????(3)
.????????????(4)
式(3)(4)中:u為擴變量;kp為二自由度控制的參數(shù);y與yr的比值為系統(tǒng)的動態(tài)特性;ki為二自由度控制的參數(shù);kd為二自由度控制的參數(shù);b?為二自由度控制的參數(shù);h0為為動態(tài)特性方程的變量;h1為為動態(tài)特性方程的變量;l為動態(tài)特性方程的變量;k為觀測器參數(shù)。
3??機遇Matlab/Simulink的仿真實驗
3.1??自動監(jiān)控系統(tǒng)仿真模型的建立
在礦井通風機自動監(jiān)控系統(tǒng)中,風量、風壓是2個大慣性、大時滯的參數(shù)。根據(jù)礦井實際的工況分析和總結,結合上述PID整定后的控制方程,我們將系統(tǒng)簡化為慣性環(huán)節(jié)和時滯環(huán)節(jié)串聯(lián)數(shù)學模型,自動控制系統(tǒng)閉環(huán)傳遞函數(shù)的計算公式為:
.???????????????(5)
式(5)中:K為觀測器參數(shù);Ts為調(diào)試參數(shù);e-τs為調(diào)試參數(shù)。
根據(jù)相關文獻中通風機監(jiān)控系統(tǒng)的調(diào)試數(shù)據(jù),在模擬實驗中選定T=60?s,k=5,τ=60?s,采樣周期為?10?s。
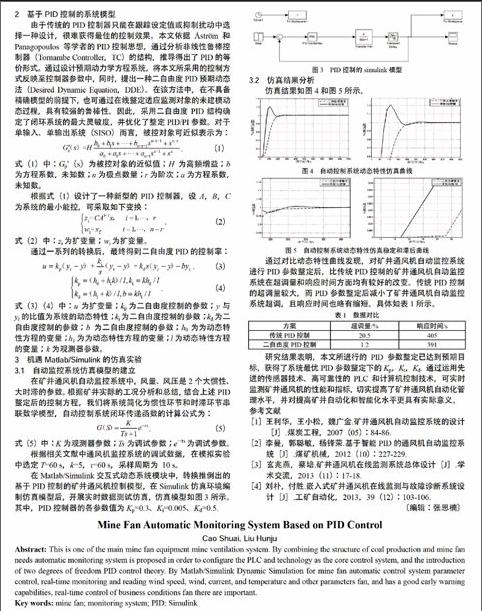
在Matlab/Simulink交互式動態(tài)系統(tǒng)模塊中,轉換推倒出的基于PID控制的礦井通風機控制模型,在Simulink仿真環(huán)境編制仿真模型后,開展實時數(shù)據(jù)測試仿真,仿真模型如圖3所示。其中,PID控制器的各參數(shù)值為Kp=0.3、Ki=0.005、Kd=0.5.
圖3??PID控制的simulink模型
3.2??仿真結果分析
仿真結果如圖4和圖5所示。
圖4??自動控制系統(tǒng)動態(tài)特性仿真曲線
圖5??自動控制系統(tǒng)動態(tài)特性仿真穩(wěn)定和滯后曲線
通過對比動態(tài)特性曲線發(fā)現(xiàn),對礦井通風機自動監(jiān)控系統(tǒng)進行PID參數(shù)整定后,比傳統(tǒng)PID控制的礦井通風機自動監(jiān)控系統(tǒng)在超調(diào)量和響應時間方面均有較好的改變。傳統(tǒng)PID控制的超調(diào)量較大,而PID參數(shù)整定后減小了礦井通風機自動監(jiān)控系統(tǒng)超調(diào),且響應時間也略有縮短。具體如表1所示。
表1??數(shù)據(jù)對比
方案
超調(diào)量/%
響應時間/s
傳統(tǒng)PID控制
20.5
405
二自由度PID控制
1.2
391
研究結果表明,本文所進行的PID參數(shù)整定已達到預期目標,獲得了系統(tǒng)最優(yōu)PID參數(shù)整定下的Kp,Ki,Kd.?通過運用先進的傳感器技術、高可靠性的PLC和計算機控制技術,可實時監(jiān)測礦井通風機的性能和指標,切實提高了礦井通風機自動化管理水平,并對提高礦井自動化和智能化水平更具有實際意義。
參考文獻
[1]王利華,王小松,魏廣金.礦井通風機自動監(jiān)控系統(tǒng)的設計[J].煤炭工程,2007(05):84-86.
[2]李曼,郭聰敏,楊鋒榮.基于智能PID的通風機自動監(jiān)控系統(tǒng)[J].煤礦機械,2012(10):227-229.
[3]玄兆燕,蔡培.礦井通風機在線監(jiān)測系統(tǒng)總體設計[J].學術交流,2013(11):17-18.
[4]劉樸,付勝.嵌入式礦井通風機在線監(jiān)測與故障診斷系統(tǒng)設計[J].工礦自動化,2013,39(12):103-106.
〔編輯:張思楠〕
Mine?Fan?Automatic?Monitoring?System?Based?on?PID?Control
Cao?Shuai,?Liu?Hunju
Abstract:?This?is?one?of?the?main?mine?fan?equipment?mine?ventilation?system.?By?combining?the?structure?of?coal?production?and?mine?fan?needs?automatic?monitoring?system?is?proposed?in?order?to?configure?the?PLC?and?technology?as?the?core?control?system,?and?the?introduction?of?two?degrees?of?freedom?PID?control?theory.?By?Matlab/Simulink?Dynamic?Simulation?for?mine?fan?automatic?control?system?parameter?control,?real-time?monitoring?and?reading?wind?speed,?wind,?current,?and?temperature?and?other?parameters?fan,?and?has?a?good?early?warning?capabilities,?real-time?control?of?business?conditions?fan?there?are?important.
Key?words:?mine?fan;?monitoring?system;?PID;?Simulink