水下生產(chǎn)設(shè)施安裝技術(shù)研究分析
2015-02-07 03:55:29尚照輝阮偉東熊海超史佑蘇峰付劍波
石油工程建設(shè) 2015年2期
尚照輝,阮偉東,熊海超,史佑,蘇峰,付劍波
1.浙江大學(xué),浙江杭州310058
2.海洋石油工程股份有限公司,天津300451
水下生產(chǎn)設(shè)施安裝技術(shù)研究分析
尚照輝1,阮偉東1,熊海超1,史佑2,蘇峰2,付劍波2
1.浙江大學(xué),浙江杭州310058
2.海洋石油工程股份有限公司,天津300451
主要對(duì)海洋油氣田開(kāi)發(fā)中水下安裝工程所需要的安裝船類(lèi)型、水下生產(chǎn)設(shè)施的安裝定位和安裝方法的選擇進(jìn)行系統(tǒng)研究,包括下水、定位、連接等作業(yè)。在上述研究的基礎(chǔ)上參考DNV規(guī)范,分析安裝船上起重機(jī)吊點(diǎn)各特征響應(yīng),并詳細(xì)論述水下生產(chǎn)設(shè)施在安裝過(guò)程中所受到的各種水動(dòng)力荷載的計(jì)算公式,便于進(jìn)行模型的力學(xué)分析。旨在通過(guò)對(duì)水下生產(chǎn)設(shè)施安裝進(jìn)行逐步分析,為設(shè)計(jì)及工程人員在對(duì)船舶類(lèi)型要求、水下生產(chǎn)設(shè)施安裝方法、安裝仿真模擬等方面提供一定的理論和技術(shù)指導(dǎo)。
水下生產(chǎn)設(shè)施;安裝;DNV規(guī)范;水動(dòng)力;研究
0 引言
海洋油氣田開(kāi)發(fā)中應(yīng)用的水下生產(chǎn)設(shè)施通常在岸上工廠進(jìn)行加工、測(cè)試、包裝,再運(yùn)送到指定地點(diǎn)進(jìn)行安裝,但某些設(shè)施要求在現(xiàn)場(chǎng)進(jìn)行制造安裝,如跨接管。將水下生產(chǎn)設(shè)施進(jìn)行定點(diǎn)安裝的過(guò)程主要包括三個(gè)步驟:裝船、運(yùn)輸和安裝,而水下安裝又包括三個(gè)階段:下水、對(duì)接和鎖定,如水下采油樹(shù)、管匯和跨接管[1]的安裝。
對(duì)于不同的安裝船、環(huán)境條件和安裝條件,水下生產(chǎn)設(shè)施的安裝方法不同。因此在進(jìn)行安裝仿真分析之前需確定安裝方法、安裝環(huán)境、安裝條件等,并做好安裝定位準(zhǔn)備以及數(shù)據(jù)分析[2]。
本文主要通過(guò)水下安裝工程中所需要的安裝船、水下生產(chǎn)設(shè)施安裝定位和安裝方法的選擇進(jìn)行系統(tǒng)詳細(xì)的研究,包括下水、定位、連接等階段。在上述研究的基礎(chǔ)上參考DNV規(guī)范,求解安裝船上起重機(jī)吊點(diǎn)各特征響應(yīng),并詳細(xì)論述水下生產(chǎn)設(shè)施在安裝過(guò)程中所受各種水動(dòng)力荷載的計(jì)算公式,便于進(jìn)行模型的力學(xué)分析。同時(shí),為設(shè)計(jì)及工程人員在對(duì)船舶要求、安裝方法、安裝仿真模擬等方面提供一定的理論與技術(shù)指導(dǎo)。
1 安裝船及水下安裝技術(shù)
1.1 安裝船的類(lèi)型及選擇條件
典型的安裝船有:運(yùn)輸安裝船和拖船;鉆井平臺(tái),包括自升式鉆井平臺(tái)、半潛式平臺(tái)和鉆井船;管道鋪管船;臍帶纜鋪管船;起重船;輔助作業(yè)船,如遙控潛水器支持船(RSV)、潛水員輔助船(DSV)和現(xiàn)場(chǎng)支持船(FSV)等。
不同的安裝階段可能需要不同的安裝船協(xié)同作業(yè)。對(duì)某特定水下生產(chǎn)設(shè)施,可能存在多種安裝船皆能夠進(jìn)行安裝工作,但是選擇哪種安裝船進(jìn)行作業(yè)最合理,則需要綜合考慮船本身的能力因素以及經(jīng)濟(jì)、成本因素。此外,水下生產(chǎn)系統(tǒng)安裝方法及其分析也基于安裝船的選擇。
1.2 安裝船主要技術(shù)參數(shù)
浮性:在一定荷載條件下的船具有浮性,船具有四個(gè)方面的浮力條件,即垂直位置、切邊、傾側(cè)及它們的組合。
穩(wěn)定性:要求當(dāng)作用在船上的力或彎矩消失后,船能夠回到最初的平衡位置。如果當(dāng)前船舶穩(wěn)定性受到影響,應(yīng)采用向船底艙注水或在船底甲板下放置配重塊,以降低船舶重心,確保船舶穩(wěn)定性。
抗沉性:即一個(gè)或多個(gè)艙室被水淹沒(méi),船舶依然能夠保持一定的浮力和穩(wěn)定性的能力。
適航性:由于風(fēng)、波浪、氣流而引起扭轉(zhuǎn)力或彎矩時(shí),船舶在海上仍能夠安全航行或運(yùn)作。
強(qiáng)度:通常包括縱向強(qiáng)度和局部強(qiáng)度,保證船的結(jié)構(gòu)在運(yùn)行、安裝過(guò)程中不會(huì)受到強(qiáng)度破壞和疲勞破壞。
甲板空間和承載能力:保證船體甲板上有足夠的空間和承載能力能夠安放和吊運(yùn)水下生產(chǎn)設(shè)施以及其他配件。
1.3 水下生產(chǎn)設(shè)施安裝定位
水下生產(chǎn)設(shè)施的安裝要求安裝船有良好的定位系統(tǒng)以保證能夠精確地安裝和操作,定位包括海面定位和水下定位。
海面定位是指安裝船利用各種方法定位以保證安裝船在安裝時(shí)處于正確的位置,主要定位方式為錨鏈系泊(錨泊)和動(dòng)力定位。錨泊定位(見(jiàn)圖1)是通過(guò)錨為海上作業(yè)系統(tǒng)定位,錨泊定位系統(tǒng)主要包括船錨、錨鏈、起錨裝置以及用于測(cè)量井與平臺(tái)相對(duì)位置的測(cè)量設(shè)施。動(dòng)力定位是一種可以不用錨系而自動(dòng)保持海上浮動(dòng)裝置的定位方法(見(jiàn)圖2)。

圖1 半潛式平臺(tái)的錨泊定位

圖2 動(dòng)力定位系統(tǒng)
水下定位是指當(dāng)設(shè)施下水或者需要與目標(biāo)點(diǎn)進(jìn)行對(duì)接時(shí),利用水下收發(fā)器/應(yīng)答器等儀器進(jìn)行設(shè)施之間的定位以控制對(duì)接過(guò)程。借助于ROV將水下生產(chǎn)系統(tǒng)放入水中并開(kāi)始安裝時(shí)則需要水下定位,對(duì)于跨接管連接更加需要確定兩個(gè)連接物件之間的距離、角度等參數(shù)。水下裝備安裝的兩種主要方法是水聲法和張索法,兩種方法中水下光源是幫助設(shè)施安裝和精確定位最重要和常用的工具。
1.4 安裝方法選擇
海洋結(jié)構(gòu)的安裝所選擇的安裝方法應(yīng)具有安全性和可操作性的特點(diǎn),同時(shí)還要有選定的干預(yù)策略。安裝方法的選擇應(yīng)滿足以下條件:
(1)經(jīng)濟(jì)成本與安裝耗時(shí)最小化。
(2)滿足安裝環(huán)境條件,如水深等。
(3)安裝設(shè)施(臨時(shí)的或永久的)不應(yīng)造成堵塞也不會(huì)影響介入過(guò)程。
(4)吊索、安裝所選用的吊裝梁/結(jié)構(gòu)/構(gòu)件的斷開(kāi)都應(yīng)符合選定的干預(yù)策略,一個(gè)備份系統(tǒng)也要建立起來(lái)。
(5)安裝設(shè)施在安裝、停滯、連接、移動(dòng)過(guò)程中不應(yīng)給永久工程帶來(lái)任何的風(fēng)險(xiǎn)。
(6)提升/安裝配置應(yīng)按最小的提升質(zhì)量來(lái)進(jìn)行設(shè)計(jì)。
2 安裝船與環(huán)境荷載分析
2.1 安裝船響應(yīng)幅值與起重機(jī)吊點(diǎn)運(yùn)動(dòng)計(jì)算
在風(fēng)、浪、流等環(huán)境荷載作用下,實(shí)際的安裝船將同時(shí)發(fā)生六個(gè)自由度運(yùn)動(dòng),如圖3所示[3]。
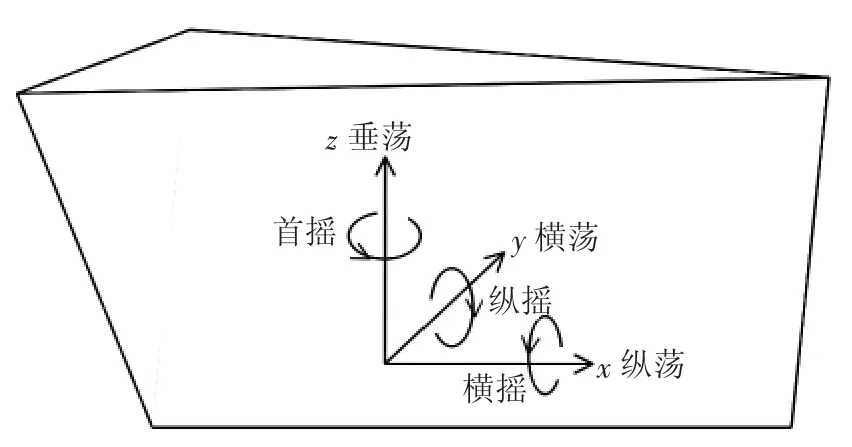
圖3 船舶響應(yīng)幅值算子(RAO)
根據(jù)DNV規(guī)范[4]可求解起重機(jī)吊點(diǎn)各特征響應(yīng),在已知海況和波流方向時(shí),起重機(jī)吊點(diǎn)垂向運(yùn)動(dòng)單幅值ηct為:

已知海況和波流方向時(shí),起重機(jī)吊點(diǎn)特征單幅值垂向速度vct以及加速度act為:

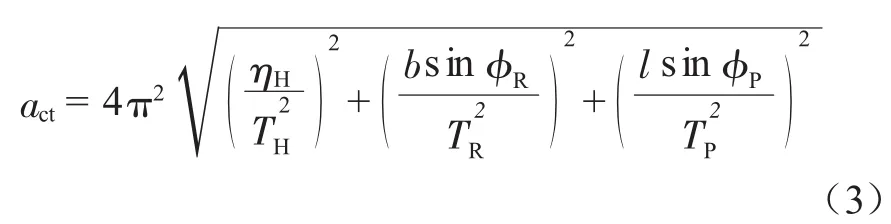
式中ηH——船舶垂蕩特征單幅值;
φR——船舶橫搖特征單幅值;
φP——船舶縱搖特征單幅值;
b——船舶中心線到起重機(jī)吊點(diǎn)水平距離;
l——船中央到起重機(jī)吊點(diǎn)水平距離;
TH——船舶垂蕩固有頻率;
TR——船舶橫搖固有頻率;
TP——船舶縱搖固有頻率。
2.2 特征力分析
當(dāng)物體降落穿過(guò)水面時(shí),特征總力Ftotal的計(jì)算如下:

當(dāng)物體下放開(kāi)始瞬間或者突然停止時(shí),會(huì)產(chǎn)生壓緊力,此時(shí)物體特征總力為:

對(duì)于海上作業(yè),動(dòng)力效應(yīng)也可以利用動(dòng)力放大系數(shù)(DAF)按照下列等式進(jìn)行計(jì)算:

式中Fsta——靜荷載;
Fhyd——?jiǎng)雍奢d;
Fsnap——壓緊力。
動(dòng)力放大系數(shù)可根據(jù)表1選用。
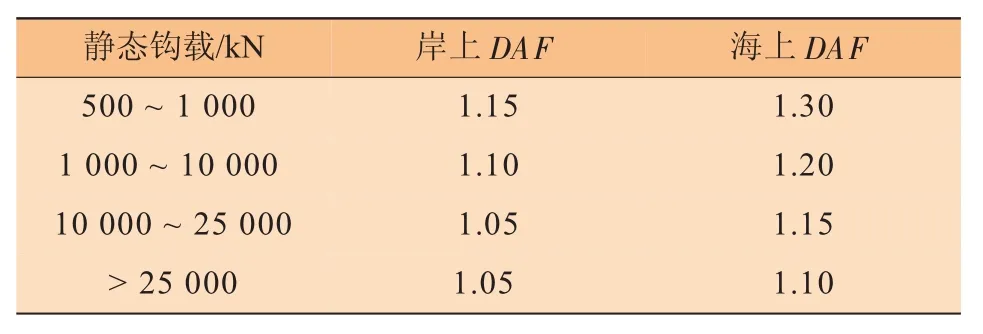
表1 動(dòng)力放大系數(shù)(DAF)
2.2.1 靜荷載計(jì)算
靜止于水中的物體所承受的靜荷載為自身干重與浮力的差值[5]。當(dāng)物體未浸入水中時(shí),靜荷載即為自身干重。數(shù)學(xué)表達(dá)式如下:

式中m——空氣中的物體質(zhì)量;
ρ——水密度;
g——重力加速度;
Vd——物體排開(kāi)水的體積。
2.2.2 水動(dòng)力載荷計(jì)算
2.2.2.1 浪濺區(qū)
當(dāng)物體下放穿過(guò)浪濺區(qū)時(shí),物體主要受到特征沖擊力、特征浮力、水動(dòng)力拖曳力、水動(dòng)力慣性力四種水動(dòng)力荷載作用,總的動(dòng)荷載為:

式中Fs——特征沖擊力;
Fρ——特征浮力;
Fd——水動(dòng)力拖曳力;
Fm——水動(dòng)力慣性力。
(1)特征沖擊力。當(dāng)物體穿過(guò)水面時(shí),物體底部受到來(lái)自水面的沖擊作用,特征沖擊力為:

式中As——穿過(guò)水面的物體單元在水平面上的投影面積;
Cs——沖擊系數(shù)(由經(jīng)驗(yàn)或者實(shí)驗(yàn)的方法確定,光滑圓柱體沖擊系數(shù)不小于3.0,其他形狀物體沖擊系數(shù)不得小于5.0);
vs——沖擊影響速度,可由下式計(jì)算獲得:
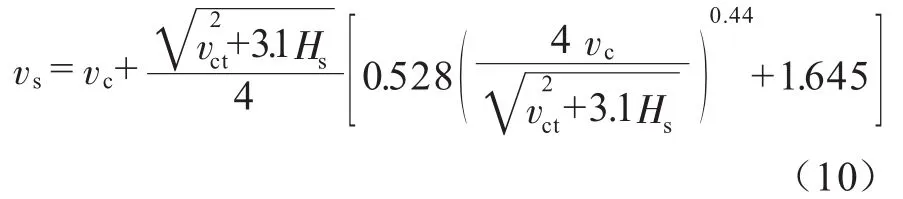
式中Hs——設(shè)計(jì)海況的有效波高;
vc——吊鉤下放速度(沒(méi)有數(shù)據(jù)的情況下可采用0.5 m/s)。
(2)特征浮力。當(dāng)物體穿過(guò)水面時(shí),物體受到來(lái)自水面向上的浮力作用,特征浮力表達(dá)式如下:

式中K——起重系統(tǒng)剛度;
Vd——物體體積。
(3)水動(dòng)力拖曳力。水動(dòng)力拖曳力可由下式計(jì)算獲得:

式中Cd——水平面拖曳力系數(shù)(取值可參考文獻(xiàn)[5]);
vr——水質(zhì)點(diǎn)和物體之間的特征垂向相對(duì)速度。
(4)水動(dòng)力慣性力。水動(dòng)力慣性力可由下式計(jì)算:

式中madd——物體附加質(zhì)量,madd=ρVdCm;
Cm——物體附加質(zhì)量系數(shù);
aw——水質(zhì)點(diǎn)的特征垂向加速度。
2.2.2.2 中層水域
當(dāng)物體下放穿過(guò)浪濺區(qū)后,繼續(xù)在水面下穩(wěn)定下放,此時(shí)物體主要受到水動(dòng)力拖曳力、水動(dòng)力慣性力兩個(gè)水動(dòng)力荷載作用,總的動(dòng)荷載為:

式中Fd——水動(dòng)力拖曳力;
Fm——水動(dòng)力慣性力。
Fd和Fm的計(jì)算方法與浪濺區(qū)的相同。
(1)壓緊力計(jì)算。物體突然下放或者突然停止時(shí),會(huì)產(chǎn)生壓緊力,在合適的天氣條件下進(jìn)行安裝可以避免壓緊力的產(chǎn)生。特征壓緊力計(jì)算如下:

式中vsnap——特征壓緊速度。
特征壓緊速度可由下式計(jì)算獲得:

式中vff——物體自由下落速度;
C——糾正系數(shù)。
(2)月池影響。通過(guò)月池安裝時(shí),物體受到的特征力計(jì)算與式(8)相似,但是需要考慮月池對(duì)安裝的影響,需要在特征力計(jì)算中用Cmfm和Cdfd替代物體附加質(zhì)量系數(shù)Cm和水平面拖曳力系數(shù)Cd,而fm和fd按下式計(jì)算:

式中Amp——月池的橫截面面積。
2.2.3 環(huán)境荷載分析
在水下生產(chǎn)設(shè)施安裝過(guò)程中,主要受到風(fēng)、波浪、流三種環(huán)境荷載。由于水下安裝對(duì)天氣的特殊要求,風(fēng)荷載對(duì)水下設(shè)施以及索具、纜繩作用力較小。因此在計(jì)算分析水下設(shè)施安裝過(guò)程時(shí),忽略風(fēng)荷載的影響。在模擬計(jì)算中將波浪和流作為環(huán)境荷載輸入?yún)?shù)。計(jì)算波浪、流荷載時(shí),在0°~360°范圍內(nèi)選取8個(gè)波向角,如圖4所示。
波浪以及海流力作用采用莫里森方程計(jì)算,物體受到波浪、海流的作用力為:

式中FD——物體受到拖曳力作用;
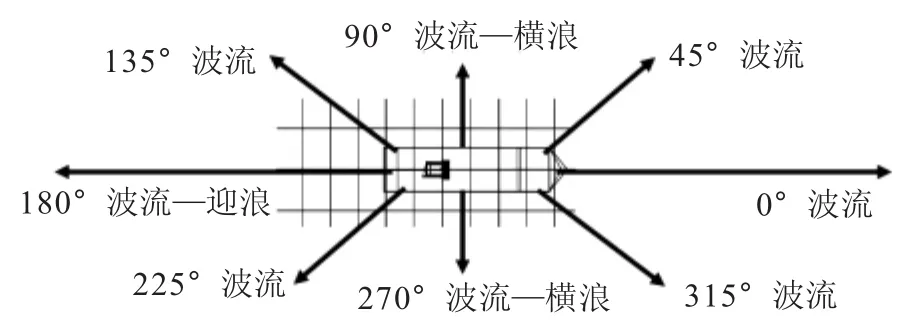
圖4 波向角選取
FM——物體受到慣性力作用。
慣性力作用于物體重心,計(jì)算如下:

式中CM——慣性力系數(shù);
du/dt——垂直于構(gòu)件軸線的水質(zhì)點(diǎn)與構(gòu)件之間的相對(duì)加速度。
對(duì)于一般結(jié)構(gòu)物,拖曳力作用于物體重心,采用下式計(jì)算:

式中CD——垂直于構(gòu)件軸線的流動(dòng)拖曳力系數(shù);
AP——在垂直于拖曳力方向上構(gòu)件的投影面積;
US——流體質(zhì)點(diǎn)在垂直于構(gòu)件軸線方向上相對(duì)于構(gòu)件的速度。
對(duì)于單位長(zhǎng)度細(xì)長(zhǎng)結(jié)構(gòu),其拖曳力采用下式計(jì)算:

式中D——細(xì)長(zhǎng)結(jié)構(gòu)橫截面直徑。
3 結(jié)束語(yǔ)
本文對(duì)水下生產(chǎn)設(shè)施安裝技術(shù)進(jìn)行系統(tǒng)分析研究,其內(nèi)容包括以下幾點(diǎn):
(1)對(duì)水下生產(chǎn)設(shè)施安裝技術(shù)進(jìn)行了分析研究,主要包括船的類(lèi)型及選擇條件、主要技術(shù)參數(shù)的確定、水下生產(chǎn)設(shè)施安裝定位以及安裝方法的選擇等,為設(shè)計(jì)、作業(yè)人員提供一定的技術(shù)指導(dǎo)。
(2)參考相關(guān)DNV規(guī)范,總結(jié)分析安裝船上起重機(jī)吊點(diǎn)各特征響應(yīng),并詳細(xì)論述水下生產(chǎn)設(shè)施在安裝過(guò)程中所受到的各種水動(dòng)力荷載的計(jì)算公式,為進(jìn)行模型的力學(xué)分析提供理論基礎(chǔ)。
[1]馬增驥,唐文勇,薛鴻祥.水下生產(chǎn)系統(tǒng)跨接管結(jié)構(gòu)極限承載能力分析[J].海洋工程,2013,31(1):9-15.
[2]Bai Y,Bai Q.Subsea engineering handbook[M].Amsterdam: Elsevier,2010.
[3]Orcina.VisualOrcaflex User Manual[M].Ulverston,UK:Orcina,2005.
[4]DNV-158(1996),Rules for planning and execution of marine operations:PART2,CHAPTER 6 Subsea Operations[S].
[5]DNV RP H103(2010),Modelling and analysis of marine operations[S].
Technology Research and Analysis of Underwater Production Facilities Installation
Shang Zhaohui1,Ruan Weidong1,Xiong Haichao1,ShiYou2,Su Feng2,F(xiàn)u Jianbo2
1.Zhejiang University,Hangzhou 310058,China
2.Offshore OilEngineering Co.,Ltd.,Tianjin 300451,China
This paper aims at doing the systematic research on the type choice of required installation vessels,positioning and installation methods of underwater production facilities.The research includes lowering underwater production facilities into water,positioning and connection,etc.Based on the above research,the characteristic responses of crane lifting point motion are well studied according to DNV rules.Then,the calculation equations for the different kinds of hydrodynamic forces acting on underwater production facilities in installation process are proposed,which is convenient for the mechanical analysis of model.The analytical research on underwater production facilities installation at sequent phases can give some theoretical foundation and technical guidances to the designers and engineers with respect to vessel type requirements,installation method and simulation of underwater production facilities.
underwater production facilities;installation;DNVrules;hydrodynamic force;research
國(guó)家科技重大專(zhuān)項(xiàng)“深水水下生產(chǎn)設(shè)施制造、測(cè)試裝備及技術(shù)”(2011ZX05027-004)
10.3969/j.issn.1001-2206.2015.02.003
尚照輝(1986-),男,河南唐河人,2013年畢業(yè)于浙江理工大學(xué)流體機(jī)械及工程專(zhuān)業(yè),碩士,2014年浙江大學(xué)結(jié)構(gòu)工程專(zhuān)業(yè)在讀博士生,從事海洋工程研究工作。
2014-07-16;
2015-01-30
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小學(xué)科學(xué)(學(xué)生版)(2020年10期)2020-10-28 07:52:12
中國(guó)化肥信息(2020年7期)2020-03-19 01:54:02
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
中國(guó)軍轉(zhuǎn)民(2017年6期)2018-01-31 02:22:28
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
機(jī)械制造文摘(焊接分冊(cè))(2014年5期)2014-03-20 13:57:44