應用于同步衛星通信的相控陣天線波束切換算法研究
2015-02-18 00:35:52向東游趙伊寧
新技術新工藝 2015年9期
石 彬,向東游,趙伊寧
(1.中國人民解放軍92941部隊,遼寧 葫蘆島 125001;2.北京機電工程研究所, 北京 100074;3.中國人民解放軍裝備學院 研究生管理大隊,北京 101416)
應用于同步衛星通信的相控陣天線波束切換算法研究
石彬1,向東游2,趙伊寧3
(1.中國人民解放軍92941部隊,遼寧 葫蘆島 125001;2.北京機電工程研究所, 北京 100074;3.中國人民解放軍裝備學院 研究生管理大隊,北京 101416)
摘要:提出了一種基于“地球系—地理系—載體系”的三坐標轉換算法,解決了相控陣天線實時波束切換的需求,實現了搭載該相控陣天線的無人飛行器可在任意位置和任意姿態角與同步衛星進行不間斷通信。通過數值模擬,證明該算法基本滿足設計需求,具有一定的實際應用價值。
關鍵詞:相控陣天線;波束切換;衛星通信
當今電子技術突飛猛進,在軍用和民用科技領域都得到了極大的發展。目前,車載預警雷達、無線通信以及射頻識別等技術的商業應用對天線的要求越來越高,尤其是對天線方向圖靈活控制的需求越來越大,而相控陣天線所具有的對波速的靈活控制以及快速掃描等優點很好地適應了這種需求[1]。
本文以某大型無人飛行器所搭載的無源相控陣天線作為研究對象。該大型無人飛行器與固定的地球同步軌道衛星進行通信,采用相控陣天線實現飛行器任意位置、任意姿態飛行過程中其天線輻射波束始終覆蓋該同步衛星,保證兩者之間的不間斷通信需求。該無源相控陣天線具有8個天線陣元,每個天線陣元在飛行器軸向上的輻射波束以40°為步長,總覆蓋范圍為-80°~80°。在飛行器徑向上的輻射波束范圍為45°,8個天線陣元圍繞飛行器徑向一周安裝,實現飛行器徑向360°全覆蓋。
本文提出了一種切換算法, 實現相控陣天線的波束指向隨著飛行過程中飛行器與同步衛星相對位置的變化,以及飛行器自身姿態的變化進行實時切換。
1涉及的幾個坐標系
1.1地球直角坐標系(e系)
坐標軸用XeYeZe表示,原點在地球中心,Ze軸位于地軸北極,Xe軸位于赤道平面指向格林威治子午線,Ye軸位于赤道平面指向90°E[2]。該坐標系與地球固聯隨地球轉動。
1.2地理直角坐標系(g系)
坐標軸用XgYgZg表示,原點位于載體質心,采用“北天東”系,Xg軸指向北,Yg指向天,Zg指向東。該坐標系原點位置代表載體位置。
1.3載體直角坐標系(b系)
坐標軸用XbYbZb表示,原點位于載體質心,Xb指向載體縱軸方向,Yb指向載體豎軸方向,Zb軸指向載體右翼。載體直角坐標系與載體固聯,并隨載體姿態變動而變動[3]。
載體直角坐標系與地理直角坐標系的相同點是原點都位于載體質心,不同點是載體直角坐標系與載體固聯,隨著載體姿態的變換而變化。
1.4姿態角定義約定
飛行器姿態角以載體坐標系為基礎進行定義,包括俯仰角θs、航向角ψs和滾轉角γs。俯仰角θs是飛行器縱軸 OXb與水平面XgOZg之間的夾角,縱軸位于水平面之上為正;航向角ψs是飛行器縱軸OXb在水平面XgOZg上的投影與OXg之間的夾角,由OXg軸逆時針轉向飛行器縱軸OXb的投影線時為正;滾轉角γs是OYb與包含飛行器縱軸OXb的鉛垂面之間的夾角,從飛行器尾部順OXb軸向前看,若OYb位于鉛垂面的右側,則滾轉角為正。
2算法思路
波束切換算法的主要功能是實時計算衛星相對飛行器位置及姿態的二維方位角度,即徑向角度α和軸向角度β,再根據角度切換天線相位。二維方位角的定義如圖1所示。
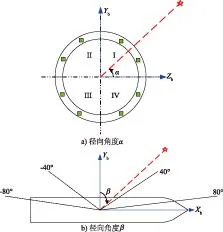
圖1 衛星相對飛行器位置及姿態的二維方位角定義
同步衛星相對地球靜止,因此描述無人飛行器位置(經度λm、緯度φm、海拔hm)及衛星位置(經度λs、緯度φs、海拔hs)可以以地球坐標系為統一的參考坐標系 。考慮到飛行器姿態參數,應將衛星坐標變換至飛行器載體坐標系下才能計算二維方位角,變換流程及輸入參數如圖2所示。

圖2 同步衛星位置坐標變換流程
3算法實現
3.1變換矩陣
從e系到g系的坐標轉換矩陣以及從g系到b系的坐標轉換矩陣均可通過逐次旋轉坐標軸的方式實現[4]。其轉換矩陣如下所示:
(1)
(2)
3.2從極坐標系到直角坐標系的變換
衛星位置參數(λs,φs,hs)以極坐標系表示,考慮地球扁率,其在e系下的坐標通過下式轉換:
(3)
3.3二維方位角計算
根據圖2所示的流程,計算衛星在飛行器載體坐標系下的坐標(xsb,ysb,zsb)如下式所示:
(4)
根據圖1所示的二維方位角定義,計算二維方位角(α,β)如下式所示:
(5)
4算法數值模擬測試及結果分析
根據式3~式5進行程序設計,對該算法進行了數字模擬,測試數據見表1。在式3中,采用的地球模型為WSG-84模型。
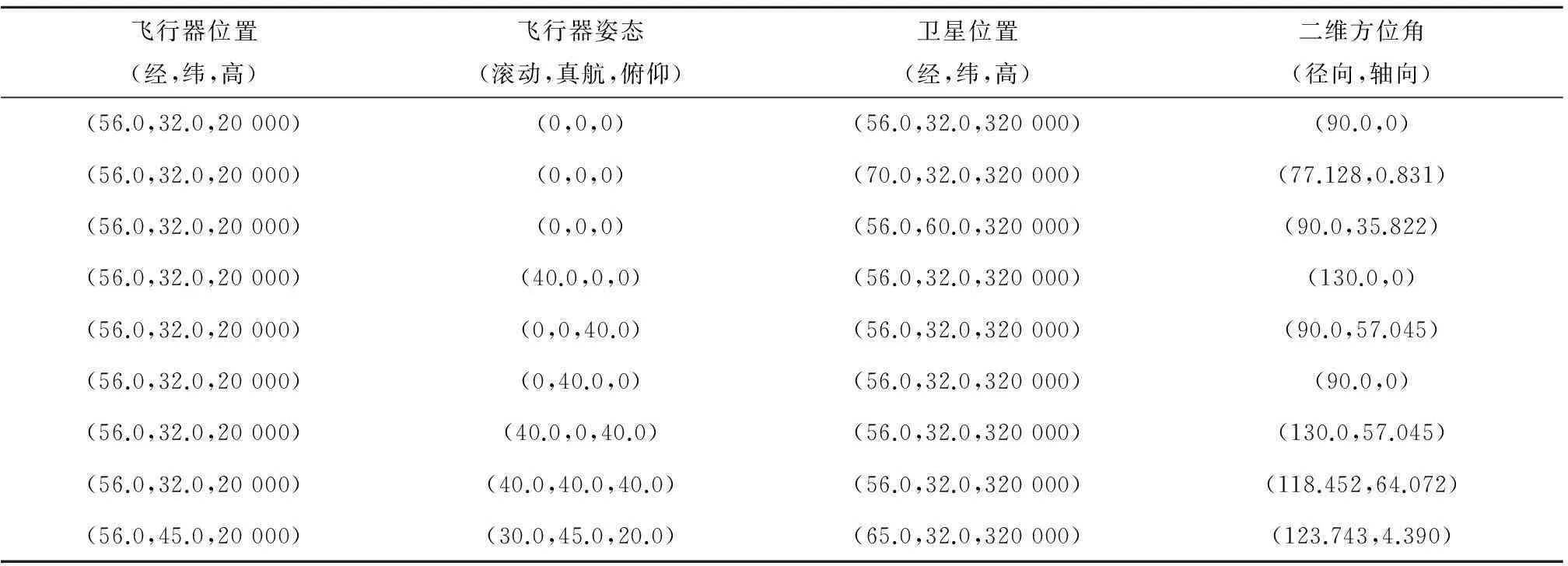
表1 算法數字模擬測試結果
由表1前3組樣本數據表明,在飛行器參數保持不變時,衛星參數的變化很準確地反映在二維方位角的變化上;表1中間3組樣本數據表明,當飛行器位置及衛星位置不變時,飛行器姿態的變化很準確地反映在二維方位角上;表1最后3組樣本數據則是考慮一般情況下的測試結果。測試結果表明,該算法符合實際應用。
5結語
波束切換的基礎實質上是求取同步衛星相對飛行器的二維方位角,“地球系—地理系—載體系”的三坐標轉換算法則為二維方位角計算提供了基礎。在具體硬件平臺實現時,由于硬件數值計算精度的限制,在一些臨近邊界條件的場合會造成較大的角度誤差,但對于實際應用,這些邊界條件并不能得到滿足;因此,該算法還是具有很大的應用價值和較為普遍的適用性。
參考文獻
[1] 房亮.雙極化相控陣天線單元研究[D].哈爾濱:哈爾濱工業大學,2013.
[2] 賈勝文.基于ARM7和FPGA的低成本小型捷聯慣導系統的設計[D].西安:西北工業大學,2006.
[3] 張立.捷聯慣導系統研究及仿真軟件包開發[D].北京:北京航空航天大學,2000.
[4] 張士邈.適合高動態環境的捷聯慣導系統高精度算法研究[D].西安:西北工業大學,2002.

責任編輯彭光宇
Research on Phase Array Antenna Beam Switch Algorithm Applied in Synchronous Satellite Communication
SHI Bin1,XIANG Dongyou2,ZHAO Yining3
(1.92941 Unit of PLA, Huludao 125001,China;2.Beijing Research Institute of Mechanical and Electrical Engineering,
Beijing 100074,China;3.Department of Graduate Management, Academy of Equipment of PLA, Beijing 101416, China)
Abstract:Propose the algorithm base on three coordinate transformations with earth-geography-basement to solve the demand of real-time beam switching of phase array antenna. With the algorithm, the uninterrupted communication between synchronous satellite and UAV with arbitrary position and attitude is implemented. The numerical simulation is presented and prove that the algorithm is useful and valuable in practical application.
Key words:phase array antenna, beam switch, satellite communication
收稿日期:2015-04-06
作者簡介:石彬(1983-),男,工程師,大學本科,主要從事通信、遙測與遙控等方面的研究。
中圖分類號:TJ 765.2
文獻標志碼:A
