基于全階模型的異步電機磁鏈觀測 收斂性分析與對策
2015-02-19 12:22:42張廣明王德明歐陽慧珉
電工技術學報 2015年1期
鄧 歆 張廣明 王德明 梅 磊 歐陽慧珉
(南京工業(yè)大學自動化與電氣工程學院 南京 211816)
1 引言
交流驅動系統(tǒng)中,傳統(tǒng)的V/F 控制方式以其簡單實用,不依賴電機參數(shù)等特點受到廣泛的使用,但它存在在低速區(qū)域的帶載能力減弱、速降增大、動態(tài)與穩(wěn)態(tài)特性下降等缺點,使其應用范圍受到限制。盡管很多學者提出了改進型的V/F 控制方式[1,2],系統(tǒng)在快速性與穩(wěn)態(tài)精度方面仍然不能讓人滿意。
矢量控制與直接轉矩控制這兩種代表當今最先進的變頻調速控制方法自從被提出來以來一直是各 國學者的研究熱點[3,4],它們實現(xiàn)了對電機的高性能控制,系統(tǒng)的各項性能指標都有很大的改善,但它們共同需要對電機磁鏈進行觀測。矢量控制系統(tǒng)中,最直接簡單的是采用電流模型對轉子磁鏈位置信號進行觀測,該模型依賴電機轉速,適用于中低速區(qū)域[5];而在直接轉矩控制系統(tǒng)中,電壓模型磁鏈觀測器則受到青睞,利用該模型觀測定子磁鏈,該模型不涉及電機轉速,存在純積分問題,適用于高速區(qū)域[6,7]。
鑒于電流模型與電壓模型這兩種最基本的估計模型存在各自的問題,近年來,全階模型受到越來越多關注,相應的文獻發(fā)表了很多[8-22]。全階模型以電機本身作為參考模型,構建電機狀態(tài)方程,引入狀態(tài)反饋矩陣,基于自適應理論對電機進行估計,它同時實現(xiàn)了電機轉速作為參數(shù)的在線辨識以及電機電流與磁鏈作為狀態(tài)變量的實時觀測。文獻[10]認為通過反饋矩陣的不同配置,全階模型在穩(wěn)態(tài)時可以等效為電流模型或電壓模型,而文獻[11]則提出了通過設計反饋矩陣,全階模型可以在電流模型與電壓模型之間的平滑切換。
目前,關于全階模型的文獻研究主要集中在反饋矩陣設計、轉速自適應律設計與穩(wěn)定性研究以及多參數(shù)同時辨識策略等方面。為了加快磁鏈觀測器對狀態(tài)變量的收斂速度,文獻[12,13]都提出了將磁鏈觀測器的極點設計在電機極點左邊,使得磁鏈觀測器比電機收斂速度更快。而對于全階模型的穩(wěn)定性分析主要通過考察辨識轉速是否收斂于實際轉速進行的,它以電流作為中間量,電機觀測磁鏈幅值認定為恒定[14-17]。事實上電機電磁系統(tǒng)中,轉子磁鏈的變化比定子電流以及q 軸電流誤差信號慢很多,Harnefors 提出了通過考察觀測磁鏈是否收斂與實際磁鏈來分析全階磁鏈觀測器的穩(wěn)定性[18],通過分析二階磁鏈誤差狀態(tài)方程的穩(wěn)定性來分析觀測器的穩(wěn)定性,提出了低速回饋發(fā)電狀態(tài)下電流誤差旋轉角度的設計方法,保證了全階磁鏈觀測器的穩(wěn)定性。
文獻[19,20]利用全階磁鏈觀測器實現(xiàn)了電機轉速與定子電阻的同時辨識,基于Popov 超穩(wěn)定性理論推導出了電機轉速與定子電阻PI 自適應律,其中觀測電流矢量與實際電流矢量的內(nèi)積作為定子電阻在線辨識的自適應信號。文獻[21]對全階磁鏈觀測器的電機轉速與定子電阻同時辨識的穩(wěn)定性進行了深入研究,得到了不穩(wěn)定范圍,并提出了改進辦法。Kubota 提出了通過在電機的轉子磁鏈軸上加低頻抖動電流使得轉子磁鏈幅值產(chǎn)生波動,實現(xiàn)了電機轉速與轉子電阻的同時在線辨識[22]。
然而關于全階模型在估計電機系統(tǒng)中參數(shù)與變量的過程中,被估計量跟隨實際量的收斂速度問題,至今沒有看到過相關文獻報道。Harnefors 對降階模型收斂性分析做了大量的研究工作。它在同步旋轉坐標系下建立磁鏈觀測器,對傳統(tǒng)電壓模型磁鏈觀測器、改進電壓模型磁鏈觀測器、電流模型磁鏈觀測器以及無功功率模型的收斂特性進行了分析比較,得出電流模型磁鏈觀測器是唯一一個具有線性化特性的磁鏈觀測器,而傳統(tǒng)的電壓模型磁鏈觀測器存在收斂速度慢,容易受到擾動的缺點[23]。
本文將對全階模型在估計異步電機參數(shù)與變量過程中的磁鏈收斂特性進行研究。由于全階模型的非線性特性,本文采用奇異攝動理論,將全階模型分解為轉速辨識模型與磁鏈觀測模型,兩個模型在時間尺度上分離,通過分析磁鏈觀測子系統(tǒng)中系統(tǒng)特征值的分布與阻尼特性研究了磁鏈觀測的收斂性與影響收斂速度的影響因子。研究結果表明磁鏈系統(tǒng)在中高速的阻尼特性需要改善,并提出了改善收斂性的對策。
2 異步電機與全階模型
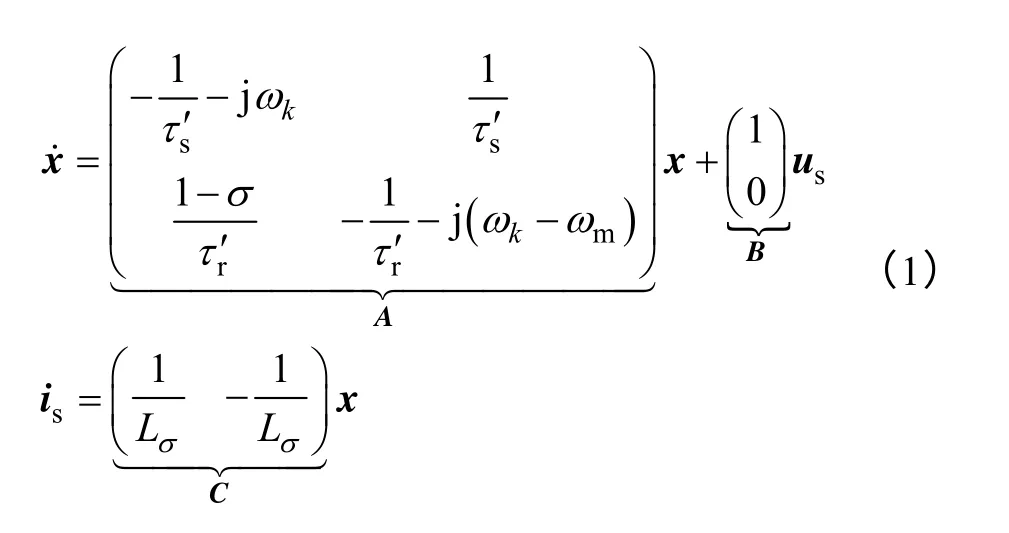
所設計的全階模型將用于矢量控制系統(tǒng)中,電機觀測磁鏈為轉子磁鏈,本文將采用異步電機的反Г 形模型進行研究,如圖1 所示,在任意參考坐標系中,以定子磁鏈與轉子磁鏈矢量作為狀態(tài)變量構造的電機狀態(tài)方程如式(1)所示。
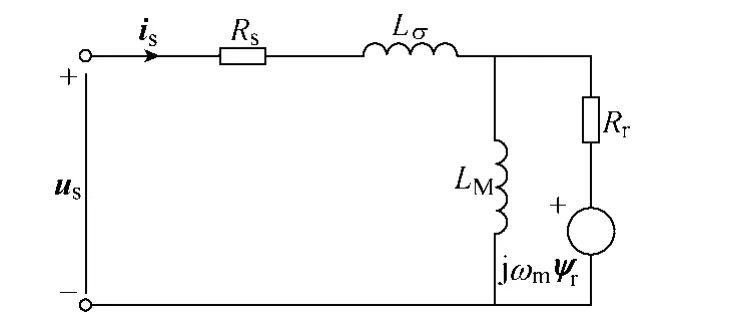
圖1 異步電機反Г 形模型 Fig.1 Inverse Г model for induction motor
式中

us——定子電壓矢量;
ψs,ψr——定、轉子磁鏈矢量;
Rs,Rr——定、轉子電阻;
LM,Lσ——互感和總漏感;
ωk——任意旋轉坐標系角頻率。
異步電機全階模型的原理如圖2 所示,它以電機本身為參考模型,構建電機狀態(tài)方程,引入狀態(tài)反饋矩陣,基于自適應理論對電機進行估計。基于自適應的異步電機全階模型可以表示為


圖2 全階模型原理圖 Fig.2 Full model scheme
式(2)中包含估計轉速m?ω ,基于波波夫超穩(wěn)定性理論或者構建李雅普諾夫函數(shù)得到如式(3)所示的全階磁鏈觀測器轉速辨識公式為[12,15,19,20]

式中,ε,kpω,kiω分別為轉速自適應信號,轉速辨識比例系數(shù),轉速辨識積分系數(shù);為的共軛;Im{ }為取復數(shù)的虛部。
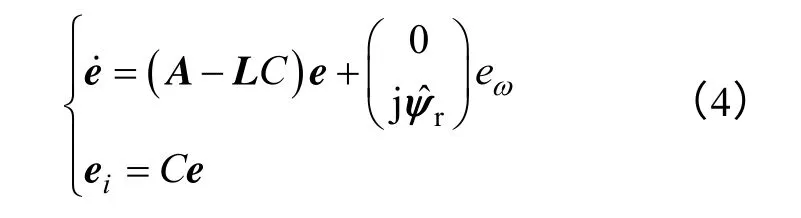
式(1)與式(2)相減得到的誤差方程為
3 全階模型分解
全階模型中,轉速是作為電機的參數(shù)進行 PI自適應律辨識得到,而磁鏈是作為狀態(tài)變量觀測得到,整個系統(tǒng)為非線性,強耦合的,為了便于分析系統(tǒng)的收斂性,現(xiàn)將系統(tǒng)進行分解。
式(4)與式(2)分別所示的轉子磁鏈與電流誤差進行展開可以表示為

異步電機的實際與觀測轉子反電動勢分別為

式(7)與式(8)的反電動勢誤差為

考慮到電流的收斂速度遠大于磁鏈收斂速度,可以認為電流誤差達到穩(wěn)定狀態(tài),將式(9)代入式(6)得到

將式(10)代入式(5)可以得到最后的轉子磁鏈觀測表達式為

在以觀測轉子磁鏈定向的坐標系中,忽略轉速辨識的比例部分,將式(10)代入式(3)可以得到式(12)所示的基于反電動勢誤差的轉速辨識公式,同時將式(11)展開可以得到式(13)所示的轉子磁鏈幅值與角頻率觀測公式。

式(12)與式(13)為全階模型估計電機轉速與磁鏈的數(shù)學模型表達式,將式(12)展開可以得到

文獻[17]對轉速PI 自適應律系數(shù)的整定方法進行了研究,研究表明積分系數(shù)kiω影響到辨識轉速與實際轉速的誤差大小,該值設計的較大。因此對比式(13)與式(14)中估計變量前的系數(shù)可以發(fā)現(xiàn),當轉速辨識系數(shù)選取比較大時,辨識轉速比觀測磁鏈的動態(tài)響應更快,達到穩(wěn)態(tài)的時間更短,根據(jù)奇異攝動理論,可以將它們在時間上進行分離。
4 電機磁鏈系統(tǒng)收斂性分析
整個全階模型分解為轉速辨識模型式(12)與磁鏈觀測模型式(13),它們在時間尺度上分離,可以獨立分析其特性。當分析轉速辨識模型時,觀測磁鏈可以認為恒定不變;當分析磁鏈觀測模型時,辨識轉速可以認為迅速收斂達到穩(wěn)態(tài),接近實際轉速。
從雙時間尺度角度出發(fā),在磁鏈觀測系統(tǒng)中可以認為辨識轉速達到穩(wěn)態(tài),即令式(12)等于零可以得到


通過式(16)可以得到辨識轉速與實際轉速之間的關系表達式為

為此,分析觀測磁鏈收斂于實際磁鏈的情況,電機實際轉子磁鏈可以通過電流模型表示為

將式(18)展開得到電機實際磁鏈為

將式(13)所示的磁鏈觀測系統(tǒng)所得到的磁鏈信息用于電機控制時,電機實際磁鏈系統(tǒng)中的同步頻率ωe由式(13)所估算出,觀察發(fā)現(xiàn)式(13)所示的觀測系統(tǒng)發(fā)現(xiàn),觀測器需要用到電機的實際反電動勢Ed,Eq,因此觀測系統(tǒng)與電機實際系統(tǒng)構成了一個閉環(huán)結構。
為了考察觀測磁鏈收斂性能,將式(16)所示 的反電動勢誤差代入式(13),這樣觀測模型中就不包括辨識轉速,得到式(20)所示的觀測 系統(tǒng)。
將式(20)代入式(19)可以得到觀測磁鏈系統(tǒng)與電機本身構成的磁鏈閉環(huán)系統(tǒng),考慮到磁鏈的非線性動態(tài)過程,存在關系式

式中


式中

觀察式(22)狀態(tài)方程矩陣H 發(fā)現(xiàn):電機d、q軸實際磁鏈與觀測磁鏈之間存在嚴重的耦合,耦合項與電機的q 軸實際電流以及電機轉速有著密切聯(lián)系。當轉矩電流iq很小時,d 軸磁鏈誤差的動態(tài)響應不受q 軸磁鏈的影響。
整個磁鏈系統(tǒng)的動態(tài)特性取決于狀態(tài)方程H 的特征值分布,因此將研究狀態(tài)方程H 的特征多項式f(s)如式(23)所示。

從特征多項式可以發(fā)現(xiàn):特征值有三個,一個為常數(shù)-1/τr,其余兩個取決于后面二次多項式的配置,該多項式與電機的轉矩電流以及電機轉速有關外,還受到系數(shù)kd、kq、ε 的影響,而這些都取決于全階模型反饋矩陣的配置,因此本文后續(xù)都只針對該二次多項特征式進行研究。
反饋矩陣為零,式(23)所示多項式的特征值軌跡圖如圖3 所示,電機轉速變化范圍為3~1 500 r/min,箭頭方向為轉速遞增方向。

圖3 反饋矩陣為零,磁鏈觀測系統(tǒng)特征根軌跡圖 Fig.3 Eigenvalue loci figure for flux observation system with null feedback matrix
從圖3 可以看出電機在空載與滿載情況下,特征值軌跡圖相似。低速區(qū)域,系統(tǒng)特征值的阻尼為欠阻尼,系統(tǒng)調整時間稍長,阻尼比略小于最佳阻 尼系數(shù);隨著轉速逐漸遞增,系統(tǒng)特征值變?yōu)?實數(shù),二階系統(tǒng)為過阻尼系統(tǒng),系統(tǒng)響應變慢。相對而言,磁鏈系統(tǒng)在中高速區(qū)域內(nèi)的阻尼比更遠離 最佳阻尼系數(shù),因此磁鏈系統(tǒng)在中高速區(qū)域內(nèi) 的收斂性要差于低速區(qū)域。
5 改善磁鏈系統(tǒng)收斂性對策
式(23)給出了基于全階模型的觀測磁鏈與電機實際磁鏈構成的閉環(huán)系統(tǒng)特征方程,為了改善全階模型的觀測性能,有必要對特征方程進行研究,式(24)所示的二次特征多項式為研究對象
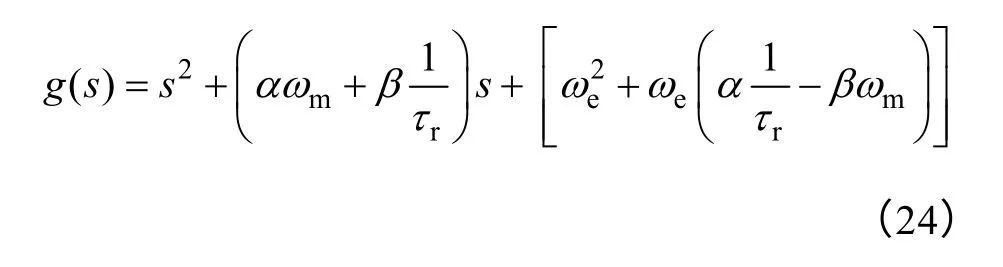


ωn——自然振蕩頻率,
將α 與α 值代入ωn與ξ 可以得到

從以上可以發(fā)現(xiàn):電機在中高速區(qū)域內(nèi)的阻尼系數(shù)幾乎與電機轉速成正比,當電機轉速較大時,磁鏈系統(tǒng)呈現(xiàn)過阻尼特性;而當電機在低速區(qū)域內(nèi)時,相對應的系統(tǒng)阻尼較小,呈現(xiàn)欠阻尼特性,阻尼系數(shù)比 存在最小值,該值比最佳阻尼系數(shù)略小,也就是說低速區(qū)域的阻尼系數(shù)在最佳值附近徘徊,這與圖3 所示的系統(tǒng)根軌跡結果吻合。因此要改善整個速度區(qū)域內(nèi)磁鏈系統(tǒng)的阻尼特性應當選擇在中高速區(qū)域減小阻尼系數(shù)。
(1)電機定子電阻與轉子電阻的阻值通常相差不會太大,觀察α 值表達式的特點,可以發(fā)現(xiàn):為了
(2)為了確保阻尼系數(shù)為正,系統(tǒng)穩(wěn)定,上式中α 值應盡量與ωm極性相同,觀察α 值的特點,可 0 時,α 與ωm極性相同,其中Rg1為一個正常數(shù)。
(3)對于阻尼系數(shù)進一步有簡化公式ξ≈ 以發(fā)現(xiàn):電機漏感很小,當令,為了保證系統(tǒng)的阻尼盡量在最佳阻尼 值附近,當α 值中分子隨著轉速增大而增大, 分母也應該隨著轉速進行增長,因此可以令sdl =,其中Rg2為一個正常數(shù)。
綜合以上分析可以總結出:為了簡化設計,令Rg1與Rg2相同,即同時可以令,其中Rg為一個正常數(shù),該值的大小可以根據(jù)電機的實際定子電阻與轉子電阻值進行設計。
圖4 所示的是改善后的磁鏈系統(tǒng)根軌跡圖,從圖中可以發(fā)現(xiàn),系統(tǒng)的阻尼值基本維持在最佳值附近不發(fā)生變化。該反饋矩陣設計方法與文獻[8]中改善電機轉速辨識性能所提出的方法類似,這說明了基于全階模型的電機磁鏈系統(tǒng)與轉速辨識系統(tǒng)互相耦合,性能之間互相影響,反饋矩陣的設計方法將同時影響磁鏈觀測收斂性能與轉速辨識的動態(tài)性能,從磁鏈收斂性能與轉速辨識動態(tài)性能兩個方面著手設計的性能改善方法能得到相似的反饋矩陣設計方法。
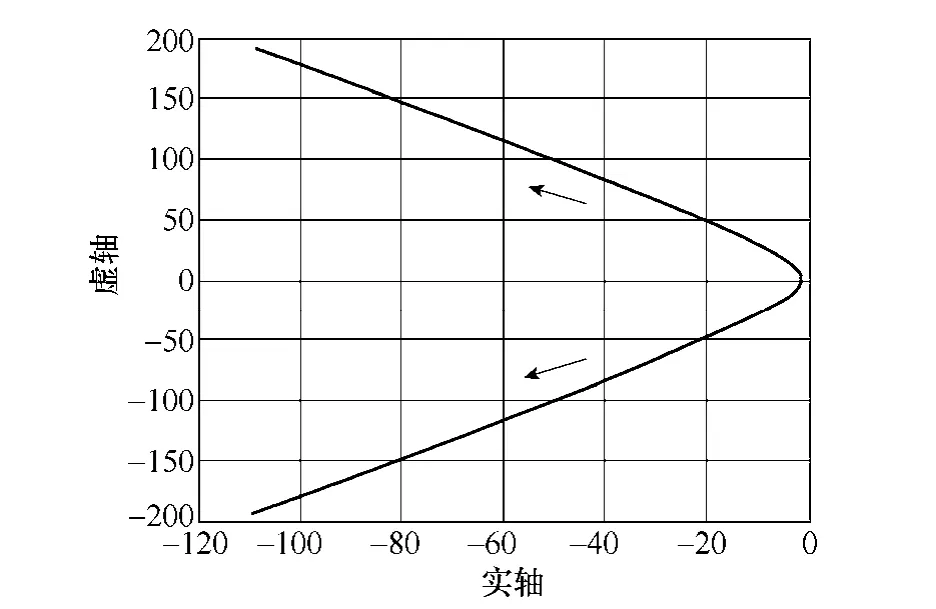
圖4 采用反饋矩陣設計,磁鏈觀測系統(tǒng)特征根軌跡圖 Fig.4 Eigenvalue loci figure for flux observation system with proposed feedback matrix
6 仿真及分析
為了驗證本文反饋矩陣對全階模型的磁鏈收斂特性分析以及所提出的反饋矩陣設計方法正確性與有效性,進行基于全階模型的異步電機矢量控制系統(tǒng)仿真。
圖5 為基于全階模型的異步電機矢量控制系統(tǒng)控制框圖。表1 所示的為仿真用到的2.2kW 電機參數(shù),電機額定電流為6.9A,額定電壓380V。

圖5 基于全階模型的矢量系統(tǒng)控制框圖 Fig.5 Control scheme for full model based vector control system

表1 感應電機參數(shù) Tab.1 Parameters of induction motor
轉子磁鏈的給定值為0.88Wb,電機在前1s 進行直流勵磁,電機速度給定為零,電機實際磁鏈與觀測磁鏈都收斂為給定值。1s 鐘進行轉速指令給定。給定轉速1 200r/min、600r/min 以及30r/min 時的電機轉速與辨識轉速,實際磁鏈與觀測磁鏈對比圖依次如圖6~圖8 所示。
從圖6~圖8 的a 圖可以發(fā)現(xiàn):當電機運行于中高速區(qū)域時,電機的觀測磁鏈與辨識轉速在瞬態(tài)過程中都有一定的振蕩,磁鏈穩(wěn)定的時間長;而低速區(qū)域的振蕩相對較小,磁鏈穩(wěn)定的時間短。

圖6 給定轉速1 200r/min 時,電機轉速與辨識轉速、 實際磁鏈與觀測磁鏈對比 Fig.6 Comparison between actual and identified speed,actual and observed flux with reference speed 1 200r/min


圖7 給定轉速600r/min 時,電機轉速與辨識轉速、 實際磁鏈與觀測磁鏈對比圖 Fig.7 Comparison between actual and identified speed,actual and observed flux with reference speed 600r/min

圖8 給定轉速30r/min 時,電機轉速與辨識轉速、 實際磁鏈與觀測磁鏈對比圖 Fig.8 Comparison between actual and identified speed,actual and observed flux with reference speed 30r/min
圖6 ~圖8 的圖b 中,采用反饋矩陣設計后,電機中高速區(qū)域觀測磁鏈與轉速在瞬態(tài)過程中的振蕩現(xiàn)象基本消失,這是因為加入反饋矩陣設計后,中高速區(qū)域的阻尼特性有很大改善;低速區(qū)域,辨識轉速也能很好地跟隨實際轉速沒有滯后,電機實際磁鏈與觀測磁鏈基本重合。
表2 給出了電機在高中低速三個區(qū)域在有無反饋矩陣時,磁鏈收斂穩(wěn)定時間對照關系。通過表格數(shù)據(jù)可以發(fā)現(xiàn),無論是有無反饋矩陣,電機在高中低速區(qū)域的磁鏈收斂時間是隨著轉速越高,收斂時間越長;加入反饋矩陣后,電機在高中速區(qū)域收斂時間有很大幅度的縮減。因此本文對高中低速區(qū)域磁鏈收斂性的分析是正確的,提出的反饋矩陣對改善收斂性是有效的。
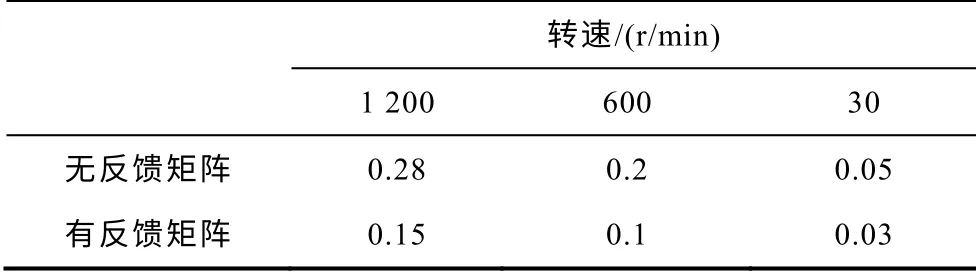
表2 磁鏈收斂時間 Tab.2 Flux convergence time (單位:s)
7 實驗及分析
實驗硬件平臺如圖8 所示,其中功率模塊選用三菱公司生產(chǎn)的智能功率模塊PM25RSB120,逆變器的死區(qū)時間設置為3.2μs,母線電壓為540V;控制板是以TI 公司生產(chǎn)的TMS320F2407 為控制芯片,主要負責電流與轉速檢測信號的采集,PWM 驅動信號的產(chǎn)生與輸出。圖9 所示的是整個全階模型的數(shù)字化軟件實現(xiàn)流程圖。
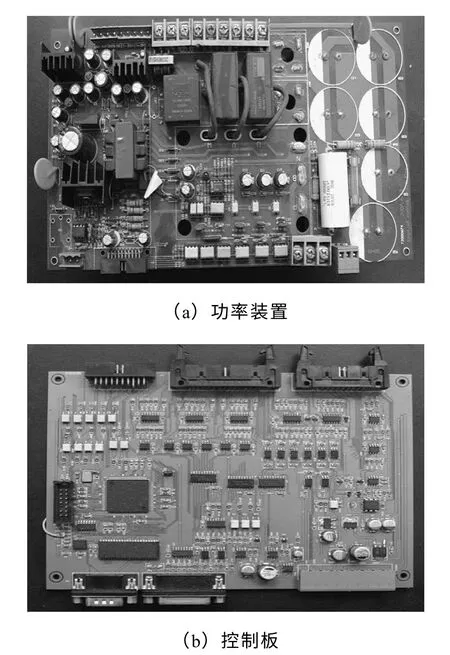
圖8 硬件平臺 Fig.8 Hardware platform

圖9 全階模型數(shù)字化軟件實現(xiàn)流程圖 Fig.9 Digital realization flow chart of full model
由于電機實際磁鏈無法檢測得到,無法從實驗直接驗證磁鏈系統(tǒng)的收斂性。但從文中的分析可以知道:觀測磁鏈與辨識轉速收斂于實際值時的收斂性是一致的,即當觀測磁鏈收斂于實際值時,辨識轉速才收斂于實際轉速,反之亦然。因此可以采用檢驗全階模型的辨識轉速收斂于實際轉速的收斂速度來達到檢驗磁鏈的收斂性目的。
實驗分為高速 1 200r/min 給定階躍以及中速600r/min 正反轉,低速區(qū)域30r/min 由于受到逆變器非線性以及電機參數(shù)等的影響較大,不便分析轉速的收斂性能,因此低速區(qū)域收斂性實驗采用觀察600r/min 正反轉過程穿越低速區(qū)域的收斂性,而中速600r/min 區(qū)域的可以通過考察電機在反轉過程中的特性進行。電機負載為半載,全階模型反饋矩陣為零以及采用所提出的設計方法后,電機實際轉速與辨識轉速對比圖分別如圖10 和圖11 所示。


圖10 給定轉速1 200r/min,實際轉速與辨識轉速對比 Fig.10 Comparison between actual speed and identified speed with reference speed 1 200r/min

圖11 600r/min 正反轉時,實際轉速與辨識轉速對比 Fig.11 Comparison between actual speed and identified speed with reference speed 600r/min forward and inverse rotation
從圖10 與圖11 中的a 圖可以發(fā)現(xiàn),當反饋矩陣為零時,基于全階模型的控制系統(tǒng)在高速區(qū)域以及中速區(qū)域內(nèi),辨識轉速在動態(tài)跟隨實際轉速的過程中都有一定幅度的振蕩,并且收斂的時間也偏長,其中給定1 200r/min 階躍相應中辨識轉速在0.15s以后基本收斂,給定600r/min 正反轉相應中辨識轉速從6.5s 開始到7.5s 后基本收斂,收斂時間在0.1s左右。600r/min 正反轉穿越低速區(qū)域時,辨識轉速基本能很好地跟隨實際轉速,振蕩非常小。
從圖10、圖11 的b 圖中,采用了所提出的反饋矩陣設計后,系統(tǒng)情形有所改觀。系統(tǒng)中辨識轉速跟隨實際轉速的性能更好,動態(tài)過程中的振蕩幅度減小,辨識轉速收斂于實際轉速的時間也越短,其中給定1 200r/min 階躍相應中辨識轉速在0.08s以后基本收斂,給定600r/min 正反轉相應中辨識轉速在6.9s 開始到7.3s 之間有小幅度振蕩,然后很快收斂于實際值,收斂時間大約0.4s。600r/min 正反轉穿越低速區(qū)域時,辨識轉速能很好地跟隨實際轉速,振蕩幾乎不存在。
因此當采用了反饋矩陣設計后,可以認為觀測磁鏈在跟隨實際磁鏈的過程中收斂性也更好,磁鏈收斂時間縮短,實驗結果與上節(jié)仿真結果一致,它表明了本文所提出的設計方法是正確與可行的。
8 總結
本文對全階模型在估計異步電機參數(shù)與變量過程中的磁鏈收斂特性進行研究。采用奇異攝動理論,將全階模型分解為轉速辨識模型與磁鏈觀測模型,兩個模型在時間尺度上分離,通過分析磁鏈觀測子系統(tǒng)中系統(tǒng)特征值的分布與阻尼特性,研究了磁鏈觀測的收斂性與影響收斂速度的影響因子。研究結果表明磁鏈系統(tǒng)在中高速的阻尼特性需要改善,并提出了改善收斂性的對策。
[1] 沈安文,張僑.基于補償策略的通用變頻器高性能控制方法研究[J].電氣傳動,2007,37(1):16-18.
Sheng Anwen,Zhang Qiao.Compensation strategy based research on high performance control method of general purpose[J].Electric Drive,2007,37(1):16-18.
[2] Garcia M,Lipo T A,Novotny D W.A new induction motor V/f control method capable of high-performance regulation at low speed[J].IEEE Transactions on Industry Applications,1998,34(4):813-821.
[3] 劉洋.高性能主軸感應電機驅動系統(tǒng)研究與開發(fā)[D].武漢:華中科技大學,2009.
[4] 張興華,孫振興,王德明.電動汽車用感應電機直接轉矩控制系統(tǒng)的效率最優(yōu)控制[J].電工技術學報,2013,28(4):255-260.
Zhang Xinghua,Sun Zhenxing,Wang Deming.Optimal efficiency control of direct torque controlled induction motor drives for electric vehicles[J].Transactions of China Electrotechnical Society,2013,28(4):255-260.
[5] Bazanella A S,Reginatto R.Robustness margines for indirect field-oriented control of induction motors[J].IEEE Transactions on Automatic Control,2000,45(6):1226-1231.
[6] 陳振鋒,鐘彥儒,李潔,等.基于改進磁鏈觀測器的感應電機轉速辨識[J].電工技術學報,2012,27(4):42-47.
Chen Zhenfeng,Zhong Yanru,Li Jie,et al.Speed identification for induction motor based on improved flux observer[J].Transactions of China Electrotechnical Society,2012,27(4):42-47.
[7] 尹忠剛,劉靜,鐘彥儒,等.基于雙參數(shù)模型參考自適應的感應電機無速度傳感器矢量控制低速性能[J].電工技術學報,2012,27(7):124-130.
Yin Zhonggang,Liu Jing,Zhong Yanru,et al.Low- speed performance for induction motor sensorless vector control based on two-parameter model reference adaptation[J].Transactions of China Electrotechnical Society,2012,27(7):124-130.
[8] 鄧歆.異步電機全階磁鏈觀測器的分析、設計及其應用研究[D].武漢:華中科技大學,2010.
[9] 張永昌,趙爭鳴,張穎超,等.基于全階觀測器的三電平逆變器異步電機無速度傳感器矢量控制系統(tǒng)[J].電工技術學報,2008,23(11):34-40.
Zhang Yongchang,Zhao Zhengming,Zhang Yingchao,et al.Sensorless vector control system of induction motor fed by three-level inverter using a full order observer[J].Transactions of China Electrotechnical Society,2008,23(11):34-40.
[10] Hinkkanen M.Analysis and design of full-order flux observers for sensorless induction motors[J].IEEE Transations on Industrial Electronics,2004,51(5):1033-1040.
[11] Kim J H,Woo J,Ki S.Novel rotor-flux observer using observer characteristic function in complex vector space for field-oriented induction motor drives[J].IEEE Transaction on Industry Applications,2002,38(5):1334-1343.
[12] Kubota H,Matsuse K.New adaptive flux observer of induction motor for wide speed range motor drives[C].IEEE IECON'90,1990:921-922.
[13] Maes J,Melkebeek J A.Speed sensorless direct torque control of induction motors using an adaptive flux observer[J].IEEE Transactions on Industry Applications,2000,36(4):778-785.
[14] Vicente I,Endemano A,Garin X,et al.Adaptive full order observer based stable speed sensorless scheme for vector controlled induction motor drives[C].EPE'09,2009:1-10.
[15] Kubota H,Matsuse K,Hori Y.Behavior of sensorless induction motor drives in regenerating mode[C].Proceedings of Power Conversion Conference,Nagaoka,1997,2:549-552.
[16] Suwankawin S,Sangwongwanich S.A speed-sensorless IM drive with decoupling control and stability analysis of speed estimation[J].IEEE Transations on Industrial Electronics,2002,49(2):444-455.
[17] Suwankawin S,Sangwongwanich S.Design strategy of an adaptive full-order observer for speed-sensorless induction-motor drives-tracking performance and stabilization[J].IEEE Transations on Industrial Electronics,2006,53(1):96-119.
[18] Harnefors L,Hinkkanen M.Complete stability of reduced-order and full-order observers for sensorless IM drives[J].IEEE Transations on Industrial Electronics,2008,55(3):1319-1329.
[19] Kubota H,Matsuse K,Nakano T.DSP-based speed adaptive flux observer of induction motor[J].IEEE Transactions on Industry Applications,1993,29(2):344-348.
[20] Yang G,Chin T H.Adaptive-speed identification scheme for a vector-controlled speed sensorless inverter- induction motor drive[J].IEEE Transactions on Industry Applications,1993,29(4):820-825.
[21] Rashed M,Stronach F,Vas P.A new stable MRAS- based speed and stator resistance estimators for sensorless vector control induction motor drives at low speeds[C].38th IAS Annual Meeting,2003,2:1181-1188.
[22] Kubota H,Matsuse K.Speed sensorless field-oriented control of induction motor with rotor resistance adapta- tion[J].IEEE Transactions on Industry Applications,1994,30(5):1219-1224.
[23] Harnefors L.Design and analysis of general rotor flux oriented vector control systems[J].IEEE Transactions on Industrial Electronics,2001,48(2):383-390.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19