基于STM 32的綠色環保型洗筷消毒一體機設計與制作
2015-02-20 13:47:16
裝備制造技術 2015年7期
(河池學院物理與機電工程學院,廣西 宜州 546300)
本文研究了一款基于STM32[4]的綠色環保型洗筷消毒一體機設計與制作。該設計通過濁度傳感器對結果進行判斷,通過加長轉臂的舵機轉向對筷子的流向進行控制。使用符合PI算法的控制器實現直流電機的調速。為了使本設計能夠快速、平穩地運行,系統必須把相應的轉向伺服電機控制以及直流驅動電機控制準確地結合在一起。
1 總體結構和工作原理
本設計的總體結構包括機械裝置和電路控制系統兩部分組成。機械部分由收集裝置[1-2]、一次清洗裝置、二次清洗裝置、運送裝置[3,5]、消毒出筷裝置五部分構成,具體結構如圖1所示。其中,收集裝置主要利用限位機構對筷子進行定量收集。一次、二次清洗裝置主要由電磁閥、直流電機、濁度傳感器、超聲波發生器以及物理清洗機構組成。運送過程主要利用升降裝置完成。消毒出筷裝置主要由紫外線臭氧發生器,以及半自動出筷機構組成。在清洗過程中全程采用MG996R舵機對筷子的流向進行輔助控制,保證清洗過程的順利進行。電路控制系統為本設計的核心組成部分,它由電源電路、信號采集電路、信號控制電路、直流電機調速電路、以及舵機轉向電路組成。本設計采用STM32單片機控制整個電路,該芯片具有豐富的增強I/O端口運行速度快。

圖1整體結構示意圖
2 控制電路系統的設計
2.1 電源電路
本設計采用220 V交流電直接進行供電,方便易得。設計電源電路如圖2所示。交流電經整流模塊后再經過可調電阻RH1以及穩壓器LM7805和LM7812經過降壓后可得到+5 V和+12 V的電壓給其余電路進行供電。

圖2設計電源電路
2.2 信號采集電路
信號采集電路用于對工作過程中產生的信號進行采集,本設計采用I2C總線進行信號采集,I2C總線通過上拉電阻接正電源。當總線空閑時,兩根線均為高電平。連到總線上的任一器件輸出的低電平,都將使總線的信號變低,即各器件的SDA及SCL都是線“與”關系,用來對本設計中各裝置中產生的信號進行收集,再傳輸給STM32單片機進行數據處理。I2C總線信號采集如圖3所示。
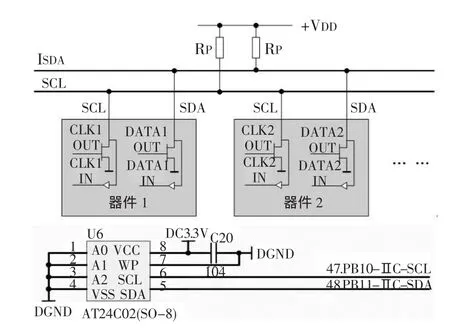
圖3 I2C 總線信號采集電路
2.3 信號處理電路
本設計通過電流采集進行信號處理,如圖4所示前一級運放構成減法電路,后一級運放用來進行高階濾波+5 V電流經電阻分壓后,用來減掉電流傳感器0 A時的基值電壓。經二階濾波電路濾波,并經過后級運放的2倍放大后引腳1輸出電壓2 V,引腳1與STM32的模數轉換通道相連,轉換結果提供給主程序,以便進行相關的處理。
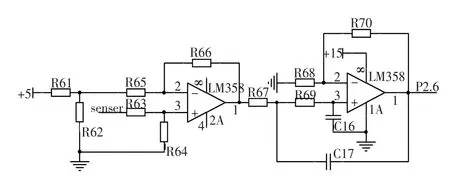
圖4信號處理電路
2.4 直流電機調速電路
本設計采用L298對直流電機進行調速控制,如圖5所示。利用該芯片可控制直流電動機的轉速與轉向,同時利用轉速差用物理分離的方法將雜質進行分離。
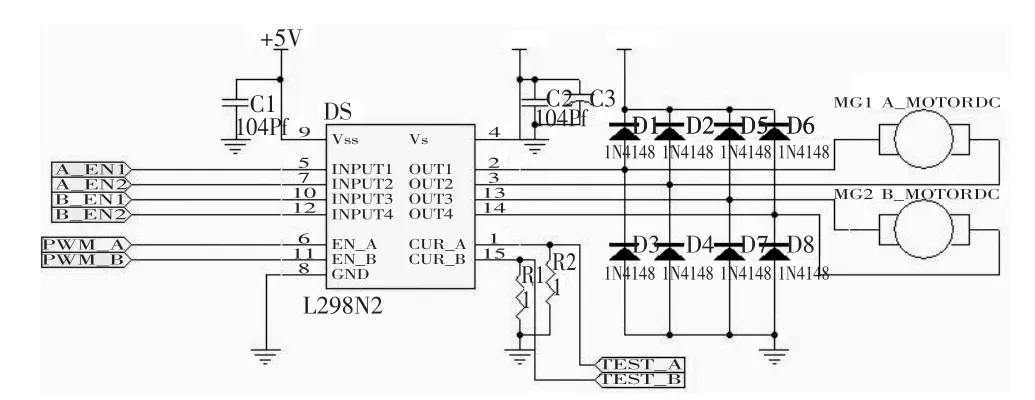
圖5直流電機調速電路
2.5 舵機轉向控制
本設計利用PWM信號對舵機控制轉向舵機自身硬件特性決定:在給定電壓一定時,空載和帶載時的角速度ω分別保持恒值,而線速度ν=ω·R,正比于轉臂的長度R。當舵機所需轉動幅度一定時,長轉臂要比短轉臂轉動的角度小,即響應更快。
3 模糊PID控制系統的設計
本文控制多采用直流電機和伺服舵機,其具有結構簡單、體積小、重量輕、免維護等諸多優點。直流電機是一個非線性、多變量、強耦合的系統,常規PID控制策略的參數不能隨電機運轉狀況的不同而變化,因此PID控制器不能提供很好的控制性能,而本文采用的模糊PID控制是模糊控制和PID控制的有效結合,可以在線調整PID控制參數,提高控制精度,獲得更好的控制效果。
如果設定的速度為Vd,而當前的實際速度為Vr,則速度偏差:
偏差變化率:

將速度偏差 e(t)和偏差變化率 EC(t-1)作為控制器的輸入變量,而控制量KP、KI、KD為輸出變量,編碼器實時測量值c(t)為比較變量。則控制器原理圖如圖6所示。

圖6模糊PID控制原理圖
根據操作人員經驗以及模糊規則確定法通過反復的實驗對比來確定模糊控制規則,使系統達到動、靜特性的最佳效果。根據PID參數規則建立△KP、△KI、△KD模糊分布規則。
4 控制系統的軟件設計
控制系統的軟件開發是基于STM32單片機進行的,軟件開發主要包括主程序流程的設計、子模塊初始化設計、電機啟動模塊設計、模糊PID控制模塊設計等。
控制器上電后,首先進行的是各個子模塊的初始化,子模塊初始化完成之后,依據霍爾傳感器反饋的高低電平來判斷當前電機轉子的位置,確定需要導通的相,以此完成電機啟動。程序流程如圖7所示。
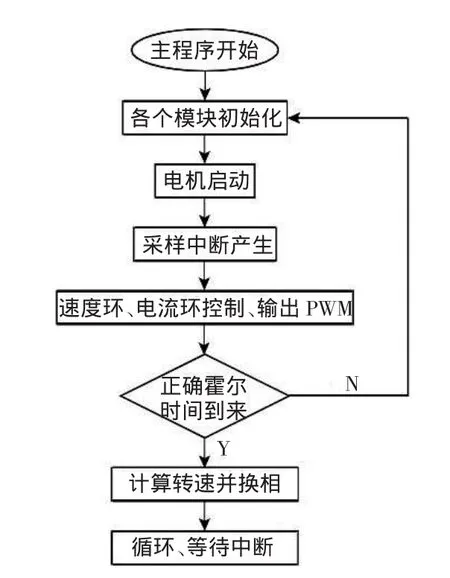
圖7主程序流程圖
5 測試及實驗結果

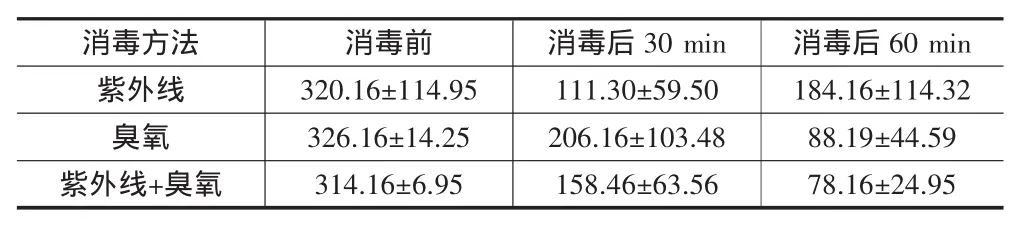
表1 消毒毒方法的菌落均數比較
[1]陳立德.機械設計基礎[M].北京:高等教育出版社,2004:236-238.
[2]Ministry ofMachinery Industry statistics compiled.Mechanical transmission[M].Machinery Industry Press.2004:78-89.
[3]蘇 鵬,周風余,陳 磊.基于STM32的嵌入式語音識別模塊設計[J].單片機與嵌入式系統應用,2011,11(2):42-45.
[4]許德珠.機械工程材料[M].北京:高等教育出版社,1992:86-128.
[5]溫熙森,陳循,徐永成,等.機械系統建模與動態分析[M].北京:科學出版社,2004:47-89.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25