飛機發電機飛升曲線的測量及傳遞函數的建立
2015-02-20 05:31:52任仁良王雪嬌
中國測試 2015年5期
任仁良,王 靜,王雪嬌
(1.中國民航大學工程技術訓練中心,天津 300300;2.中國民航大學航空自動化學院,天津 300300)
飛機發電機飛升曲線的測量及傳遞函數的建立
任仁良1,王 靜2,王雪嬌2
(1.中國民航大學工程技術訓練中心,天津 300300;2.中國民航大學航空自動化學院,天津 300300)
為建立飛機發電機的傳遞函數,設計基于虛擬儀器技術的飛機發電機飛升曲線測試系統。該系統采用NI公司的DAQ-6211高速采集卡實現數據采集,利用LabVIEW實現對數據的處理及飛升曲線的顯示;并利用matlab軟件進行系統辨識,從而建立飛機發電機的傳遞函數。實測證明,只要調壓系統在電感負載或低功率因數下穩定,則在其他負載下一定穩定。該飛升曲線測試方法安全可靠,發電機傳遞函數的建立為機載電源系統穩定性的理論分析和發電機調壓器設計提供依據。
飛機發電機;飛升曲線;傳遞函數;LabVIEW;Matlab
0 引 言
飛機機載電源的可靠性和穩定性,直接關系機載電氣電子設備的正常工作,甚至影響飛行安全。2006年國際標準組織修改了ISO 1540——1984《航空航天飛機電源和主配電點的有關設備組合系統的特性》,推出了ISO 1540——2006標準《航空航天 飛機電源有關設備組合系統的特性》,對機載電源的特性做出了更加嚴格的要求。為了分析機載電源的穩定性,必須建立由發電機和調壓器構成的電壓調節系統[1]的傳遞函數,相對來說,調壓器傳遞函數比較容易建立;而飛機發電機一般為三級發電機,結構較復雜,用理論方法建立傳遞函數有一定的局限性,存在較大偏差。
飛機發電機的勵磁繞組電壓激增時,發電機的相電壓會出現瞬間由低到高的變化曲線[2],即為飛升曲線。對飛機發電機飛升曲線的采集測量一直是個難題,因為曲線飛升過程非常短暫,一般在零點幾秒內結束。以往的研究都是利用示波器捕捉采集的曲線,并近似讀取電壓值;本實驗選用虛擬儀器技術,可以完成對飛升曲線的準確測量,并利用Matlab軟件對其進行系統辨識,從而擬合出發電機近似傳遞函數數學模型[3]。
1 測試系統設計
本測試系統硬件系統框圖如圖1所示。測試系統主要包括直流電源、控制電路、飛機發電機、程控負載箱、電壓調理電路、采集卡和計算機7部分。被測飛機發電機的型號為 976-J118(Westinghouse Electric Corporation生產),額定功率為30kW。
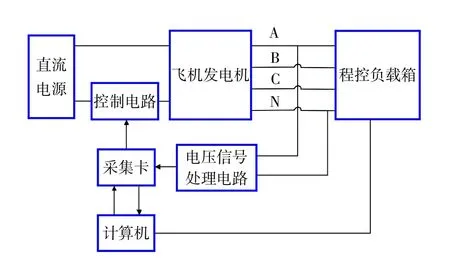
圖1 飛機發電機飛升曲線測量系統框圖
測試時,需要斷開發電機的調壓器,由直流電源向勵磁繞組供電。圖中,控制電路與直流電源串聯接入勵磁繞組中,計算機通過采集卡發送驅動信號給控制電路,控制電路通過繼電器短接電阻的方式使勵磁繞組的電壓瞬間加大,相當于給勵磁繞組上加了一個階躍信號。計算機通過RS485串口對程控負載箱進行加卸載和功率因數設定,電壓信號處理電路將發電機輸出電壓降壓調理后,供數據采集卡采集,計算機對采集的數據進行分析處理。
本測試系統中用到的數據采集卡是NI公司的DAQ-6211,它的單通道最大采集速度可達250kHz;本實驗中,飛機發電機電壓的頻率是400Hz,設定采樣速率為8kHz,滿足香農采樣定理,采集卡滿足測試要求。
2 測試過程及測試系統軟件設計
2.1 測試流程
飛機發電機電壓飛升曲線的測量流程圖如圖2所示。在加平衡負載的條件下,只對A相進行飛升曲線的測量即可。
測試前做好準備工作,斷開調壓器,等待發電機相電壓升至115V。計算機設定功率因數及負載,通過RS485串口給發電機加載,此時電壓有所下降,旋轉直流電源開關增加勵磁繞組的電壓,直至相電壓恢復到115V。
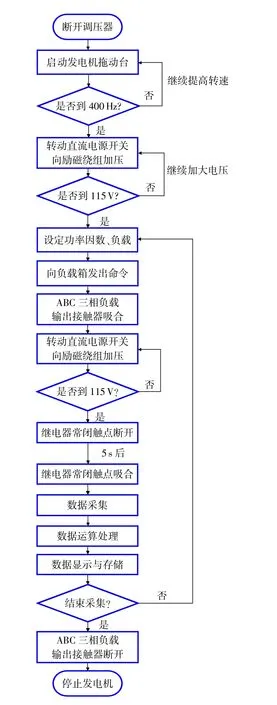
圖2 飛機發電機飛升曲線測試過程流程圖
加載后電壓穩定在115V時,控制電路的繼電器常閉觸點斷開,將控制電路中的電阻接入勵磁繞組中,勵磁電壓下降,相電壓下降,待相電壓穩定5s后,繼電器常閉觸點吸合,電阻被短接,勵磁電壓增大,相電壓也瞬間增大,而要采集的電壓飛升曲線就在繼電器常閉觸點吸合的零點幾秒內。
2.2 數據采集
本系統選用LabVIEW2011集成軟件開發平臺進行發電機飛升曲線的數據采集處理和存儲;選用Matlab作為系統辨識的基礎軟件,對存儲的數據進行辨識處理,求取飛機發電機的傳遞函數。
飛機發電機電壓飛升曲線的采集是一個非常短暫的過程,在0.3s以內。本測試系統利用LabVIEW設計程序通過采集卡發送驅動信號給控制電路,必須保證繼電器的常閉觸點吸合時,程序已經準備好等待采集。為采到這個短暫的過程,設計程序針對繼電器吸合時間做了測試,測量出延遲時間,在數據采集時扣除該時間[4],保證不丟失曲線飛升的過程,確保采集數據的準確性,這是實驗能否成功的關鍵。
在實際測量時,LabVIEW程序設計對觸發繼電器和數據采集實現了順序自動控制,先是給采集卡輸出口一個高電平(5V),繼電器常閉觸點斷開,設定5 s后(多次實驗證實此時的相電壓已穩定),再給輸出口一個低電平(0 V),繼電器常閉觸點吸合,500 ms后(扣除繼電器延時時間)輸入端口進行數據采集。對輸出和輸入口控制都是利用LabVIEW程序中的DAQ助手實現,做到了驅動和采集互不影響,甚至可以同步進行。
2.3 數據計算與存儲
根據暫態浪涌電壓與其等值階躍作用相當的原理,可以把一個復雜的暫態浪涌電壓轉換為它的等值均方根[5-7],利用這種方法,先將采集的數據存儲起來,電壓恢復到穩定值后再進行數據計算顯示,并存儲處理后的數據。
工程中,常要滿足這樣的采樣定理:T0=T95/(5~15),其中T0表示采樣周期,T95表示過程階躍響應達到穩定值95%所需要的調節時間[8],此公式說明過渡過程內,應采集5~15個數據。本實驗設定采集卡的采樣速率為8kHz,采集數據進行計算后存儲的數據周期是0.002 5 s,飛升曲線過渡過程的調節時間在0.25~0.3 s內,這個過程有100~120個點,完全滿足這一條件。
3 測試結果
文獻[5]中明確指出,飛機機載電源最低功率為0.6,因此,實驗時將功率因數設為0.6。圖3是功率因數為0.6,額定負載(30kW)50%時的飛升曲線圖。
實驗證明,功率因數變化,負載大小變化,測得的飛升曲線有一定的變化,但是變化不大,可以用功率因數為0.6,額定負載50%的飛升曲線來求取飛機發電機的傳遞函數。

圖3 功率因數為0.6,額定負載50%時的飛升曲線圖
4 傳遞函數的求取及建立
Matlab的系統辨識工具箱提供了進行系統辨識的有力工具。辨識過程中比較關鍵的是辨識模型的預選取,直流電源電壓是加在交流勵磁機的勵磁繞組上,輸入為交流勵磁機的勵磁繞組電壓Uij,輸出為主發電機的端電壓Ug,故可將其近似成二階模型求取傳遞函數[9]。
進行測試時,勵磁電壓Uij由3.70V突變到8.77V,Ug從存儲的數據中截取調用,利用Matlab7.4.0的辨識工具箱辨識到離散模型,對其連續化得到其近似的傳遞函數[1]。
本文采用參數模型中的OE121模型y=[B/F]u+e[10]對飛升曲線進行了辨識。辨識模型的階躍響應輸出曲線(藍色)與實測曲線(紅色)如圖4所示。可以看出辨識結果擬合率為95.98%,擬合程度較高,辨識方法可行。
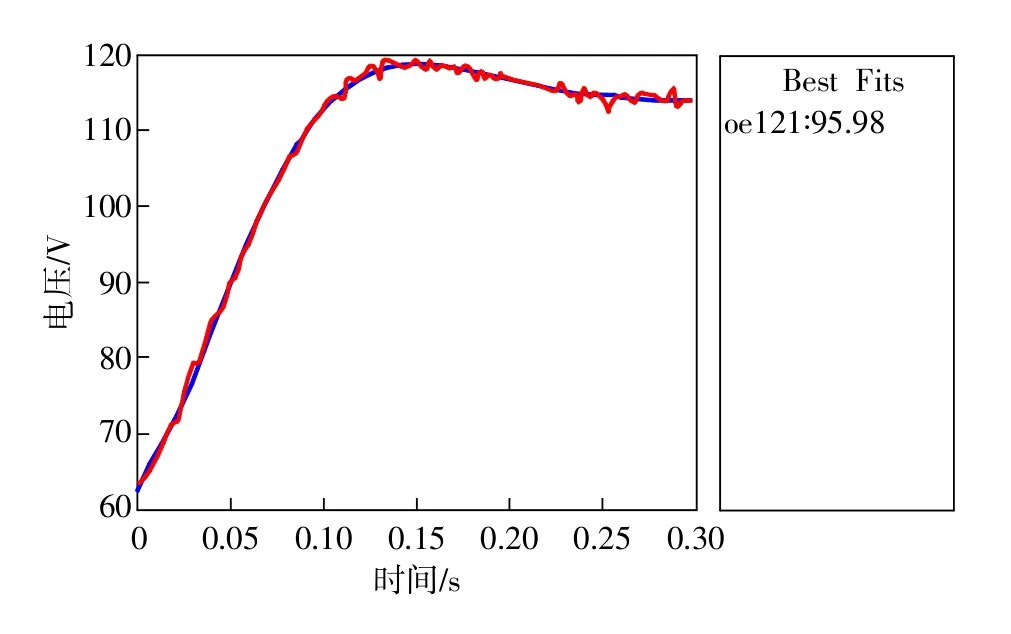
圖4 功率因數為0.6,加載50%時的辨識模型圖
系統辨識結果為:B=[0 0.08297 0],F=[1-1.921 0.924 8],忽略隨機干擾e的影響,其離散模型為對其連續化可得飛機發電機的傳遞函數
Rising curve measurement of aircraft generators and transfer function establishment
REN Renliang1,WANG Jing2,WANG Xuejiao2
(1.Engineering and Technology Training Center,Civil Aviation University of China,Tianjin 300300,China;2.College of Aeronautical Automation,Civil Aviation University of China,Tianjin 300300,China)
In order to establish transfer functions of aircraft electric generators,the paper has designed a rising curve test system for aircraft generators based on a virtual instrument technology. Its operating principles are as follows:collect data with National Instruments'high-speed data acquisition cards;use Labview to process data and display rising curves;and achieve system identification through matlab software to set up transfer functions of aircraft generators.This system is safe and reliable.And the establishment of transfer functions of aircraft generators has provided afoundation foranalyzingthestabilitytheoryofairborne powersystemsand for designing generator voltage regulators.
aircraft electric generator;rising curve;transfer function;LabVIEW;Matlab
A
:1674-5124(2015)05-0087-03
10.11857/j.issn.1674-5124.2015.05.022
2014-08-18;
:2014-10-12
中國民航局科技基金項目(MHRD201003)中央高校基金項目(3122014D035)
任仁良(1957-),男,江蘇江陰市人,教授,碩士,研究方向為檢測技術與自動化裝置、航空電氣技術、智能檢測與智能控制、飛機電器設備故障診斷。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2019年11期)2019-06-24 03:40:28
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
大電機技術(2017年3期)2017-06-05 09:36:02
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
軍事文摘(2016年16期)2016-09-13 06:15:49