應用虛擬結構的衛星編隊飛行自適應協同控制
2015-02-22 07:55:13黃勇李小將楊業偉李志亮裝備學院研究生管理大隊北京0462裝備學院航天裝備系北京0463裝備學院激光推進及其應用國家重點實驗室北京046
中國空間科學技術 2015年3期
關鍵詞:結構
黃勇李小將楊業偉李志亮(裝備學院研究生管理大隊,北京 046)(2裝備學院航天裝備系,北京 046)(3裝備學院激光推進及其應用國家重點實驗室,北京 046)
應用虛擬結構的衛星編隊飛行自適應協同控制
黃勇1李小將2,3楊業偉1李志亮1
(1裝備學院研究生管理大隊,北京 101416)
(2裝備學院航天裝備系,北京 101416)
(3裝備學院激光推進及其應用國家重點實驗室,北京 101416)
針對衛星編隊飛行協同控制存在質量、轉動慣量不確定性及外部擾動的問題,提出了一種應用虛擬結構的衛星編隊飛行自適應協同控制方法。首先,通過對虛擬結構模型的描述,建立了虛擬結構狀態變量與編隊衛星期望狀態之間的表達式;其次,設計了編隊衛星和虛擬結構的位置、姿態自適應協同控制器,通過在虛擬結構控制器中引入編隊衛星的狀態誤差,實現了編隊信息至虛擬結構的反饋,并采用Barbalat引理證明了閉環系統的穩定性和對有界擾動的抑制;最后,以三星編隊協同軌道機動和空間指向性偏轉為例對所設計的控制器進行了仿真驗證。仿真結果表明:設計的控制器能夠實現對編隊衛星質量和轉動慣量的自適應估計,使得編隊衛星位置和姿態控制誤差最終趨近于零,驗證了所提方法的有效性。
協同控制;自適應;虛擬結構;不確定性;有界擾動;衛星編隊
1 引言
目前,衛星編隊飛行協同控制策略主要以主從結構、行為結構和虛擬結構協同控制為主[1],每種控制策略各有特點。其中,主從結構和行為結構編隊飛行協同控制策略在星間的相對運動控制方面優勢明顯,但卻不利于對編隊整體行為的控制。而虛擬結構編隊飛行協同控制策略僅需要通過控制虛擬結構即可實現對整個編隊控制的目的,易于對編隊整體行為進行描述和控制[2-5]。文獻[3-5]引入編隊信息到虛擬結構的反饋提升了編隊飛行的穩定性和魯棒性。文獻[4]中引入的多級虛擬結構分布式控制思想,使得每個虛擬結構中又包含有多個虛擬結構,有利于編隊衛星的在軌擴充和撤離。然而,上述文獻研究對象均集中于深空環境中的編隊飛行,采用的衛星動力學模型為簡單的二階積分模型。而針對深空環境中編隊衛星設計的控制器并不可簡單地用于近地軌道編隊衛星,需考慮地球引力、外界干擾甚至質量和轉動慣量的不確定性對衛星位置和姿態的綜合作用。因此,近地軌道空間中的虛擬結構編隊飛行協同控制問題還有待于探討和研究。
本文針對近地軌道編隊飛行,考慮衛星質量和轉動慣量的不確定性,分別對編隊衛星和虛擬結構設計位置、姿態自適應協同控制器,同時證明了系統的穩定性和對有界擾動的抑制。最后,以編隊整體平移和空間指向性偏轉為例仿真驗證了方法的有效性。
2 問題描述
2.1 軌道動力學模型
近地軌道衛星在地心慣性坐標系下的軌道動力學方程可以表示為[6]

式中 mi為衛星i的質量;ri和vi為衛星i在地慣系中的位置;fi和di分別為衛星i所受的控制力和空間攝動力;μ為地球引力常數;‖ri‖表示向量ri的歐式范數。
2.2 姿態動力學模型
剛體衛星姿態動力學方程[6]為

式中 Ji為衛星i的轉動慣量;ωi為衛星i相對于地慣系的角速度;τi和ti為衛星i所受的控制力矩和干擾力矩。
由單位四元數表示的衛星姿態運動學方程[7]為

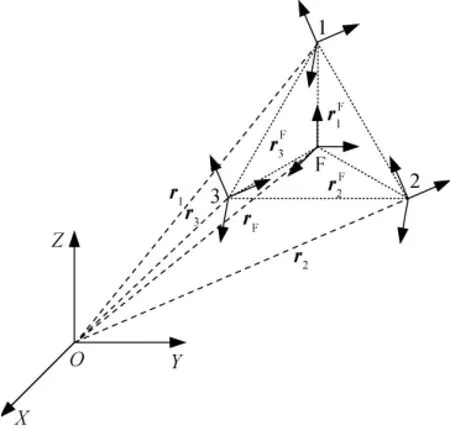
圖1 虛擬結構模型示意Fig.1 Schematic diagram of virtual structure
2.3 虛擬結構模型
若將一顆衛星視為在慣性系中運動的剛體,則該剛體中各點的絕對位置會發生變化,但同一剛體中不同點之間的相對位置是一定的。若將該剛體中的某些點以衛星取代,且將剛體虛擬化后,則這些相對位置彼此固定的衛星便會組成一個形似剛體的衛星編隊。如上所述,虛擬結構模型如圖1所示:坐標系(O-XYZ)為地慣系;三角形的頂點代表三個編隊成員,各成員本體系固聯于成員質心;若將三星編隊整體等同于一個虛擬剛體,并在虛擬質心處建立一個參考系F,F運動,則整個編隊隨之而動。
根據上述對虛擬結構模型的描述,結合科里奧利相對運動理論[8],可得到由虛擬結構狀態變量表示的編隊成員期望狀態表達式:

2.4 控制目標
假設衛星編隊中各成員均可獲取期望狀態信息,定義衛星i的狀態誤差:位置誤差速度誤差,姿態四元數誤差,角速度誤差。其中,為四元數qi的逆,定義為;表示四元數乘法。控制目標為:在衛星質量和轉動慣量不確定的條件下,對虛擬結構和衛星分別設計位置、姿態自適應協同控制器,控制虛擬結構狀態向期望狀態運動的同時,編隊成員狀態向期望狀態運動,最終實現編隊的整體控制。即t→∞時,
3 自適應協同控制器設計
在衛星編隊飛行任務中,編隊成員多為小衛星,其在軌運行過程中由于燃料消耗、彈性結構和太陽翼等造成的衛星質量和轉動慣量不確定性不容忽視。因此,有必要設計自適應的協同控制器以使被控系統達到控制目標。
3.1 編隊衛星位置和姿態自適應控制器設計
為便于控制器設計及后續定理的證明,定義位置和速度誤差輔助變量(α為正常數):

設計由PD控制律加上前饋自適應補償環節組成的位置協同控制律如下:

式中 γi為正常數。定義衛星i的質量估計誤差為,則有

暫不考慮衛星i所受的空間攝動力,系統狀態誤差動力學模型的閉環形式為

定理1 考慮被控系統動力學模型式(1),假設衛星i所受的空間攝動力di=0,在衛星質量不確定的條件下,采用控制律式(6)和式(7),有及全局一致有界,且當t→∞時,滿足→0,→0。
證明 選取如下Lyapunov函數:

將式(9)沿被控系統式(1)對時間t求導,得

同樣,引入有關姿態四元數和角速度誤差的輔助變量β為正常數:


聯立式(2)和式(11)可得:

設計由PD控制律加上前饋自適應補償環節組成的姿態協同控制律如下:


式中 ηi為正常數。定義ξi的估計誤差為,則有
暫不考慮衛星i所受的干擾力矩,系統狀態誤差動力學模型的閉環形式為

定理2 考慮被控系統動力學模型式(2),假設衛星i所受的干擾力矩ti=0,在衛星轉動慣量不確定的條件下,采用控制律式(12)和式(14),有,及全局一致有界,且當t→∞時,滿足→0→0。
證明 選取如下Lyapunov函數[12]:

將式(15)沿被控系統式(2)對時間t求導,得:

由于V1>0,≤0,則(si,)∈L∞;結合式(11)和=-,可得,及全局一致有界。另外根據式(12)~(14)可得∈L∞。由Barbalat引理可知,當t→∞時,si→0;而式(8)可視輸入為si的一階線性系統,則該系統是漸近穩定的,即,)∈L2∩L∞,因此,當t→∞時,有→0,→0。證畢。
3.2 有界擾動穩定性分析
下面對被控系統含有外部干擾的情況進行討論。這里假設衛星i所受的空間攝動力Di和干擾力矩ti有界,即‖di‖≤Di,‖ti‖≤Ti,此假設合理且不失一般性。選取與式(9)和式(15)同樣的Lyapunov函數,分別對時間t求導,得

對于V1,對于V2,當時,有可見系統屬于有界條件下的穩定,通過調節控制參數和,可使系統從任意初始狀態收斂到平衡點的δi和εi鄰域內。
3.3 虛擬結構位置和姿態控制器設計
在設計虛擬結構位置和姿態控制器時,須考慮編隊信息至虛擬結構的反饋,以免虛擬結構運動過快導致編隊衛星跟蹤困難。定義編隊信息變量:

將E1和E2分別引入虛擬結構的位置和姿態控制器中,設計位置和姿態控制律如下:


式中 λF、σF、、、ζF為正常數;其余參數的定義類似于衛星i,且不確定參數和的自適應更新律不變。當虛擬結構控制器中包含編隊信息反饋時,衛星偏離期望狀態,E1和E2增大,則控制器對虛擬結構的控制作用增強,從而實現對編隊整體運動速度的控制。
系統的穩定性證明同上。
4 算例仿真與分析
下面以三星編隊為例,對編隊整體平移和空間指向性偏轉控制進行仿真,驗證本文控制方法的可行性和有效性。
4.1 編隊整體平移控制仿真
仿真場景設定如下:假設虛擬結構初始狀態為r(0)=[0 10 0]Tm,q(0)=[0 0 0 1]T,
FF現要求虛擬結構沿著空間直線x=0.6t,y=0.5t+10,z=0.3t運動,同時達到期望姿態四元數。要求編隊衛星從具有一定誤差的初始狀態開始,跟蹤虛擬結構,在參考系F中形成穩定的等邊三角形,并在后續的運動中保持編隊構型不變。
衛星在參考系F中的初始和期望位置:

衛星在參考系F中的初始和期望姿態:

編隊衛星整體平移協同控制的仿真曲線見圖2~圖5。從圖2虛擬結構和編隊衛星的位置跟蹤誤差曲線可以看出,虛擬結構位置跟蹤誤差收斂較快(約為10s),在其達到對期望軌跡的穩態跟蹤后,各編隊衛星才逐漸實現對各自期望軌跡的穩態跟蹤。仿真結束時,編隊衛星各方向位置跟蹤誤差可維持在較好的精度范圍內。編隊衛星在地慣系中的運動軌跡如圖3所示,其中,A0,B0,C0分別為三顆衛星的初始位置,在仿真至70s時,三顆衛星建立起穩定的三角形構型△A1B1C1,并在后續的運動中維持構型不變直至仿真結束時的最終構型△A2B2C2。虛擬結構控制器中含編隊信息反饋(σF=1)和無編隊信息反饋(σF=0)時的位置跟蹤誤差對比如圖4所示,其衡量指標δ為

可見,含編隊信息反饋時,編隊衛星具有更低的跟蹤誤差和更快的誤差收斂速度。編隊運動過程中虛擬結構和編隊衛星姿態四元數矢量部分誤差曲線如圖5所示。類似于位置跟蹤誤差曲線,虛擬結構姿態四元數誤差同樣先于編隊衛星收斂到零值附近,二者均具有較高的收斂精度。
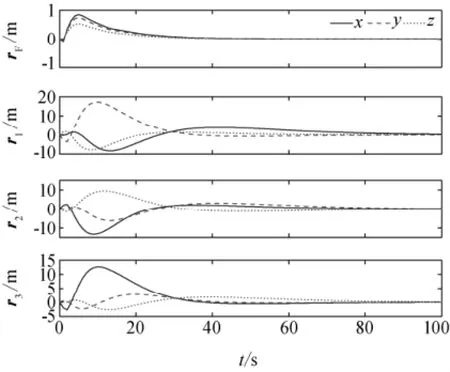
圖2 虛擬結構和衛星位置跟蹤誤差Fig.2 Position track errors of virtual structure and satellites
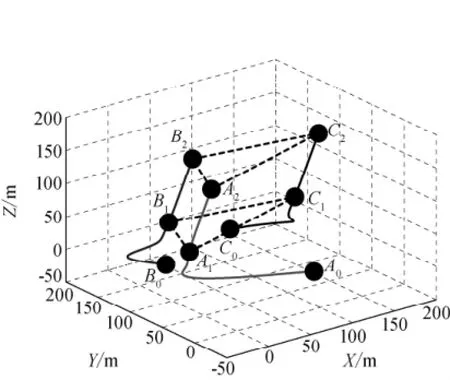
圖3 編隊整體平移運動軌跡Fig.3 Motion trajectories of formation satellites
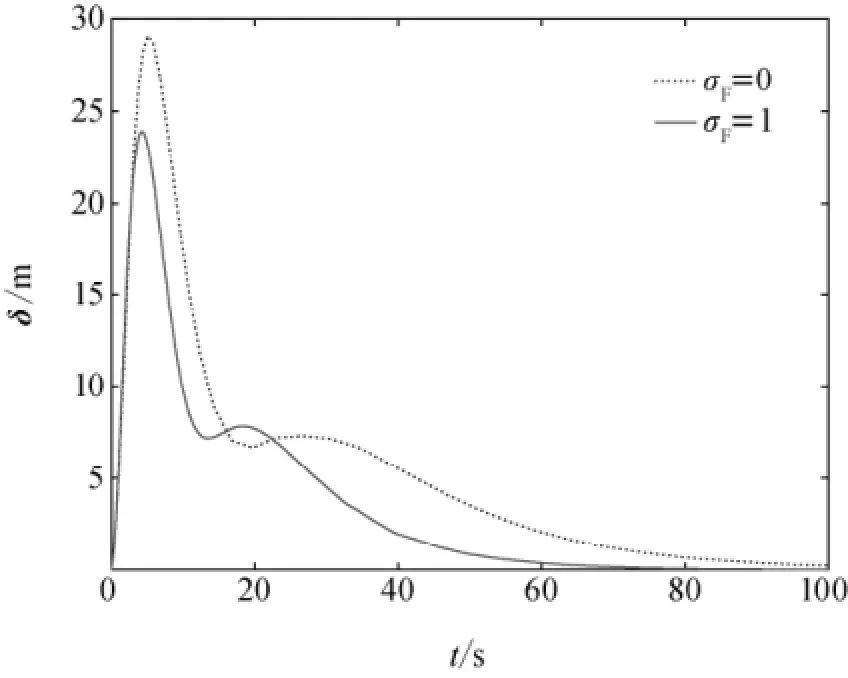
圖4 σF=1和σF=0時位置跟蹤誤差對比Fig.4 Position track error when σF=1andσF=0
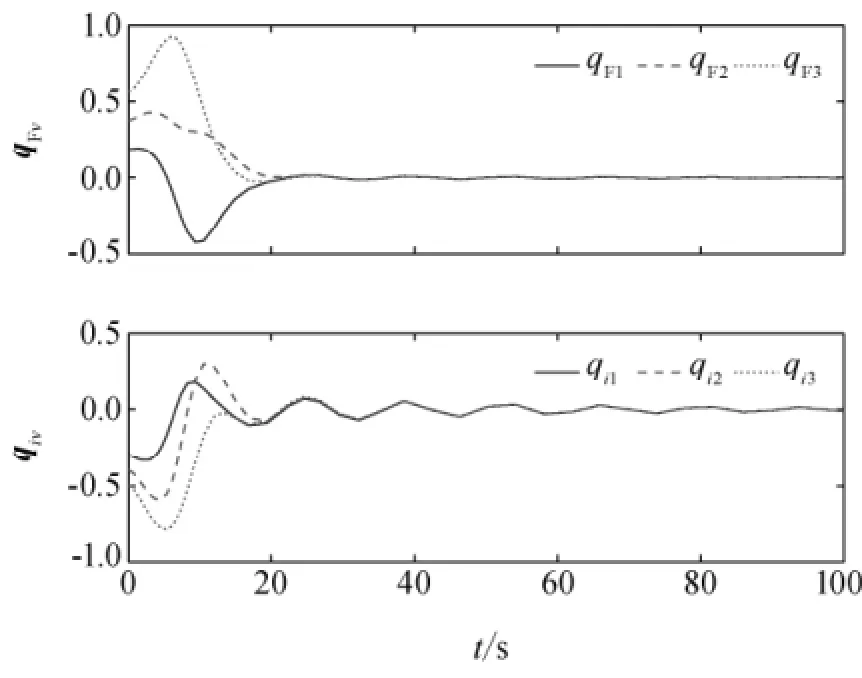
圖5 虛擬結構和衛星姿態跟蹤誤差Fig.5 Attitude track errors of virtual structure and satellites attitude errors
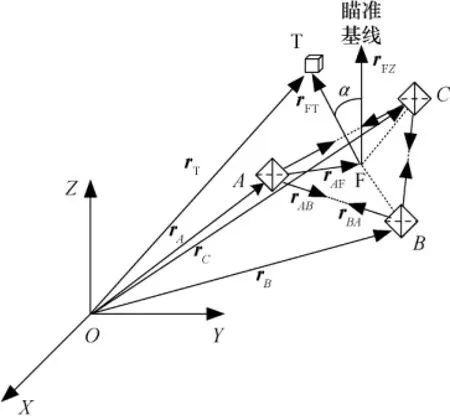
圖6 編隊空間指向性偏轉示意Fig.6 Schematic diagram of formation directive declination
4.2 編隊空間指向性偏轉控制仿真
下面對編隊在空間中的指向性偏轉進行控制仿真,該技術主要用于實現對空間目標的跟蹤和觀測。仿真場景設定如下:如圖6所示,錐體A、B和C分別代表三顆衛星,立方體T代表空間目標。初始時刻,三顆衛星組成一個平行于XOY平面的等邊三角形,且具有相同的Z方向姿態指向。以△ABC的形心F為原點建立參考系F,垂直于三角形平面的向量rFZ為整個編隊的瞄準基線。現要求整個編隊在空間發生偏轉,使得瞄準基線在一定時間t內轉過α角最終指向空間目標T,正三角形構型保持不變,且實現各衛星姿態與瞄準基線的同步偏轉。
若已知虛擬結構在地慣系中的初始狀態變量、三顆衛星在參考系F中的初始狀態變量及空間目標T在地慣系中的位置。要想實現編隊整體對空間目標的指向,首先應確定編隊瞄準基線rFZ從初始指向到最終指向空間目標T需要轉過的α角。由三顆衛星在地慣系中的位置矢量(可通過上述兩類初始狀態變量計算得到),計算可得形心F在地慣系中的矢量:

進一步計算,可得編隊瞄準基線rFZ在地慣系中的矢量:

式中 矢量rAF=rF-rA;矢量rBF=rF-rB。
由于空間目標T在地慣系中的位置已知,則有矢量rFT=rT-rF,從而最終計算得到瞄準基線rFZ所需轉過的α角:

設置虛擬結構初始狀態為rF(0)=[8×106,8×106,8×106]Tm,qF(0)=[0,0,0,1]Tm;三顆衛星在參考系F中的初始位置分別為r1F(0)=[57.73,0,0]Tm,r2F(0)=[-28.87,-50,0]Tm,r3F(0)=[-28.87,50,0]Tm,即三顆衛星在參考系F中組成一個邊長為100m的等邊三角形,初始姿態均為qiF(0)=[0,0,0,1]T;空間目標T在地慣系中的位置為rT=[8×106-25,8×106+20,8×106+40]Tm。于是,由式(19)~式(21)計算可得編隊瞄準基線rFZ所需轉過的角α=0.674 9rad。設定仿真時間t=200s,編隊衛星參數和控制器參數的取值同上。
編隊在空間中針對目標T進行指向性偏轉的三維仿真曲線如圖7所示,可以看出,編隊整體類似于一個剛體在空間發生偏轉,并將瞄準基線rFZ最終指向空間目標T。三顆衛星的相對距離隨時間t變化的曲線如圖8所示,可見,整個偏轉過程中三顆衛星可較好地保持相對距離,誤差精度保持在0.006m范圍內。三顆衛星的控制力和控制力矩變化曲線分別如圖9和圖10所示。由于衛星A和C在空間中的位置改變較大,故所需的控制力較大。而三顆衛星在空間中的姿態偏轉一致,故所需的控制力矩相同。
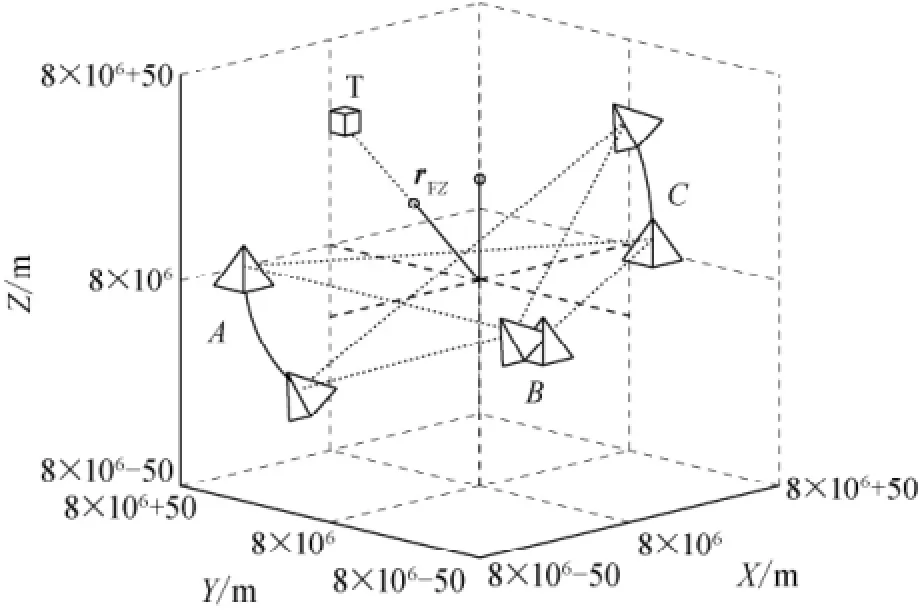
圖7 編隊空間指向性偏轉三維仿真Fig.7 Simulation of formation directive declination
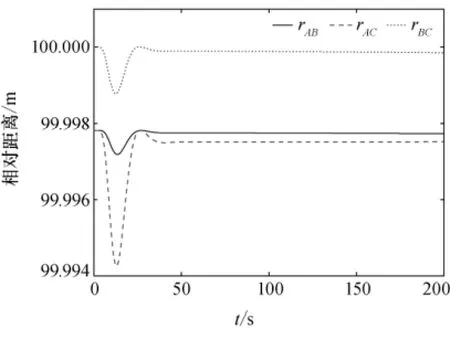
圖8 編隊衛星相對距離變化Fig.8 Relative distance between formation satellites
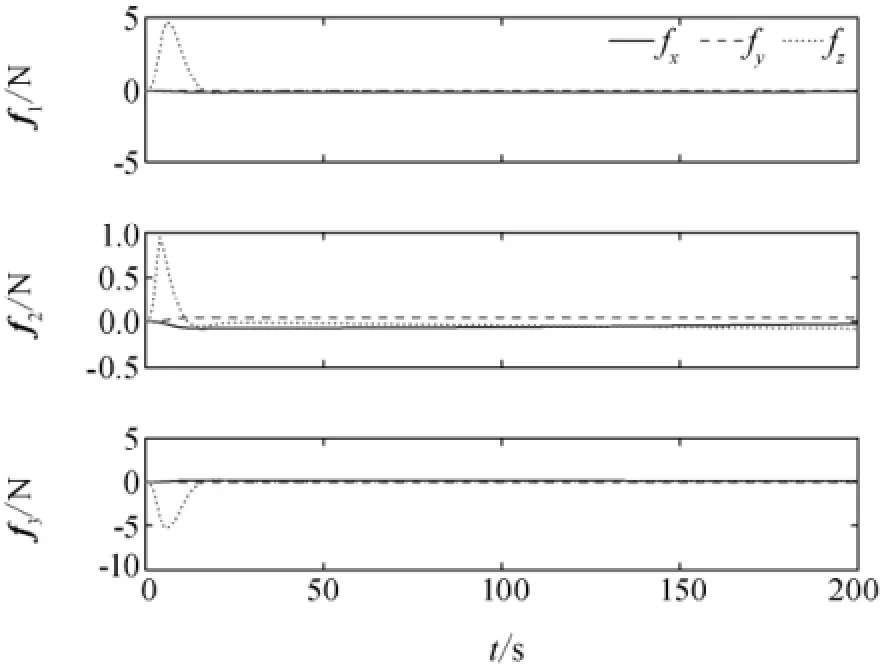
圖9 編隊衛星控制力變化Fig.9 Control force of formation satellites
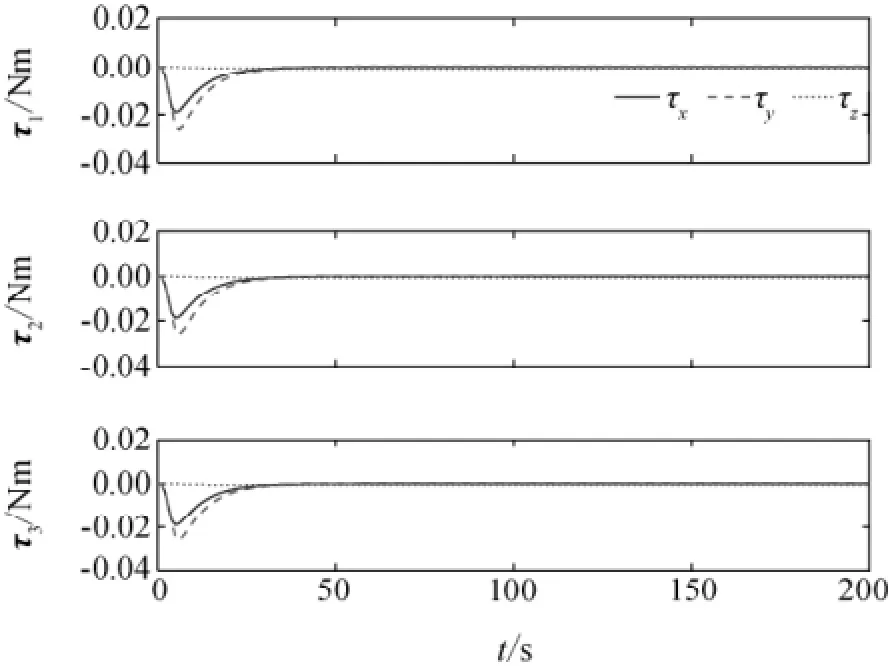
圖10 編隊衛星控制力矩變化Fig.10 Control torque of formation satellites
5 結束語
本文將虛擬結構引入近地軌道編隊飛行的協同控制中,提出了一種基于虛擬結構的編隊飛行自適應協同控制方法。考慮衛星質量和轉動慣量的不確定性,分別對編隊衛星和虛擬結構設計了一種獨立的位置和姿態自適應協同控制器,且實現了編隊信息至虛擬結構的反饋。最后,以編隊整體平移和空間指向性偏轉控制為例進行了仿真驗證,可以得出以下結論:
1)設計的位置和姿態協同控制器可使編隊在整體平移和空間指向性偏轉過程中維持編隊構型不變,驗證了文中方法的有效性。
2)將編隊信息引入到虛擬結構協同控制器,可有效改善編隊衛星控制誤差的收斂性能,并實現對編隊整體運動速度的控制。
[1] SCHARF D,HADAEGH F,PLOEN S.A survey of spacecraft formation flying guidance and control (part II):control[C]∥Proceedings of the 2004 American Control Conference,Boston,June 30-July 2,2004,New Jersey:IEEE Press,2004.
[2] BEARD R W,LAWTON J,HADAEGH F Y.A coordination architecture for spacecraft formation control[J].IEEE Transactions on Control Systems Technology,2001,9(6):777-790.
[3] WEI R,BEARD R W.Virtual structure based spacecraft formation control with formation feedback[C]∥Proceedings of AIAA Guidance,Navigation,and Control Conference and Exhibit,Monterey,August 5-8,2002,Reston:AIAA Inc.,2002.
[4] WEI R,BEARD R W.Decentralized scheme for spacecraft formation flying via the virtual structure approach[J].Journal of Guidance,Control,and Dynamics,2004,27(1):73-82.
[5] 馮成濤,王惠南,劉海穎.基于虛擬結構的衛星編隊機動控制 [J].系統工程與電子技術,2011,33(1):143-145,156.
FENG CHENGTAO,WANG HUINAN,LIU HAIYING.Maneuver control of satellite formation based on virtual structure[J].Systems Engineering and Electronics,2011,33(1):143-145,156.
[6] HOWARD D C.Orbital mechanics for engineering students[M].London:Butterworth-Heinemann,2010:753-620.
[7] 蔣鋒,王惠南,皇超頌.基于對偶四元數的編隊飛行衛星相對位姿描述[J].中國空間科學技術,2012,32(3):20-26,34.
JIANG FENG,WANG HUINAN,HUANG CHAOSONG.Algorithm for relative position and attitude of formation flying satellites based on dual quaternion[J].Chinese Space Science and Technology,2012,32(3):20-26,34.
[8] 劉清華.科里奧利加速度的推導及物理分析[J].邢臺師范高專學報,2002,17(2):39-41.
LIU QINGHUA.Deduction of Coriolis acceleration and its physical analysis[J].Journal of Xingtai Senior Teachers College,2002,17(2):39-41.
[9] KHALIL H K.Nonlinear systems[M].New Jersey:Prentice Hall,2002:323-329.
[10] 張海博,胡慶雷,馬廣富.基于有向圖的航天器編隊魯棒自適應姿態協同跟蹤控制 [J].宇航學報,2012,33(8):1072-1079.
ZHANG HAIBO,HU QINGLEI,MA GUANGFU.Robust adaptive cooperative tracking control for multi-spacecraft formation flying based on directed graph[J].Journal of Astronautics,2012,33(8):1072-1079.
[11] VANDYKE M C,HALL C D.Decentralized coordinated attitude control within a formation of spacecraft[J].Journal of Guidance,Control,and Dynamics,2006,29(5):1101-1109.
[12] 張保群,宋申民,陳興林.輸入受限的編隊衛星分布式姿態協同控制 [J].中國空間科學技術,2011,31(1):16-24,41.
ZHANG BAOQUN,SONG SHENMIN,CHEN XINGLIN.Decentralized attitude coordination control of satellites within formation under input constraints[J].Chinese Space Science and Technology,2011,31(1):16-24,41.
Adaptive Cooperative Control for Satellites Formation Flying Using Virtual Structure
HUANG Yong1LI Xiaojiang2,3YANG Yewei1LI Zhiliang1
(1 Department of Graduate Management,Equipment Academy of PLA,Beijing 101416)
(2 Department of Space Equipment,Equipment Academy of PLA,Beijing 101416)
(3State Key Laboratory of Laser Propulsion &Application,Equipment Academy of PLA,Beijing 101416)
Aiming at the cooperative control problem of satellites formation flying with mass,inertia uncertainties and external disturbances,an adaptive cooperative control method using virtual structure was proposed.Firstly,through the description of the virtual structure mode,the expressions between the virtual structure state variables and the desired states of the formation satellites were built.Secondly,the position and attitude adaptive cooperative controllers of the formation satellites and the virtual structure were designed.By introducing the state errors of the formation satellites to the virtual structure controllers,the feedback from the formation satellites to the virtual structure was realized.Besides,the closed-loop system stability and the controllers′bounded disturbances suppression were proved by using Barbalat lemma.Finally,the three-satellite formation cooperative maneuver and directive declination were simulated with the designed controllers.The results show that the designed controllers can adaptively estimate the satellite mass and inertial,and drive the control errors of the position and attitude to zero,which verify the method′s effectiveness.
Cooperative control;Adaptive;Virtual structure;Uncertainty;External disturbances;Satellites formation
10.3780/j.issn.1000-758X.2015.03.010
(編輯:車曉玲)
黃 勇 1986年生,2011年獲空軍航空大學軍事裝備學專業碩士學位,現為裝備學院兵器科學與技術專業博士研究生。研究方向為分布式航天器協同控制。
2014-07-30。收修改稿日期:2014-10-07
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50