足環節模型構建模式與踝關節角度參數變異性研究
——人體常速平面行走的試驗驗證
2015-02-26 10:15:32張宗程劉海斌元文學
天津體育學院學報 2015年2期
關鍵詞:模型
張宗程,劉海斌,元文學,王 凱
●研究報道 Short Comunications
足環節模型構建模式與踝關節角度參數變異性研究
——人體常速平面行走的試驗驗證
張宗程1,劉海斌2,元文學2,王 凱3
目的:比較分析不同足環節模型構建模式與踝關節角度參數的變異性規律,針對性研究人體下肢及足環節運動時合理選擇相關模型,并為正確定義環節角度參數提供理論依據。方法:在試驗對象小腿環節和足環節特征點粘貼反光球,以構建國際通用的3種足環節模型和國內普遍使用的2種足矢量模型;通過三維影像捕捉系統獲得反光球的三維空間坐標數據;由相關分析軟件計算出人體常速平面行走過程中不同足模型產生的踝關節角度變化值。結論:數據驗證與理論推理得出,足尖模型不適用于構造踝關節,跖趾關節模型只能應用于高配置運動捕捉實驗室。因此,研究推薦使用跖趾模型。三點角和四點角是矢量模型,構造關節角度不準確且有較大誤差。與環節角相比,三點角放大了踝關節角度,四點角縮小了踝關節角度變化范圍,只適合一些特殊試驗條件下的粗略研究。
足模型;踝關節;環節角;矢量角;步態周期
關節角定義為人體某一關節處兩長骨之間增加或減小的角度及變化[1]。INAΜN[2]認為,踝關節的運動實際上是由距下關節和脛距關節共同產生。把足環節作為一個剛體模型來研究可以減少試驗研究[3]與臨床研究的復雜性。臨床上較通用的足環節模型有密爾沃基模型(Μilwaukee Foot Μode)、牛津成人足模型(Oxford Foot Μodel forAdults)、牛津兒童足模型(Oxford Foot Μodel for Children)和海德爾堡模型(Heidelberg Foot)[4]。
使用恰當的方法定義人體關節角一直是生物力學分析中爭論的焦點。對關節角度概念和計算方法進行定義與規范是準確描述人體運動的保證,也是不同研究者進行資料對比、數據共享的基礎[5]。為了深入研究這一問題,本文探討了國際上通用的3種踝關節環節角構造方法與計算過程,國內體育運動技術分析中普遍使用的三點角和四點角問題,旨為我國運動生物力學領域研究人體運動時的關節角度問題提供理論參考。
1 研究對象與方法
1.1 研究對象
共招募20名男性志愿者作為試驗對象,年齡(20.6±1.7)歲,身高(175.8±3.9)cm,體重(66.6±4.5)Kg,均無神經系統和運動系統疾病。試驗前,就試驗目的和內容進行相關培訓,并簽訂自愿參加、無報酬的相關試驗協議。
1.2 試驗儀器
運動學數據由Vicon Nexus運動捕捉/分析系統(Oxford,UK)獲得,10個紅外攝像頭,采樣頻率250 Frame/s,系統只對貼于人體表面的反光球(直徑1.5 cm)進行自動識別與數字化處理。濾波器采用2階巴特沃茲低通濾波器,截斷頻率6 Hz。
1.3 3種足環節模型定義
試驗對象下肢相應特征點有股骨外側髁、小腿外側、踝外側髁、腳跟、腳尖、第二跖骨末端、跖趾關節外側和跖趾關節內側,需要測量人體參數包括髂前上棘寬度、膝關節直徑、踝高、踝寬和足寬。
1.3.1 小腿環節定義 貼于小腿的標記點有股骨外髁、小腿外側和踝外側髁3個(見圖A)。通過公式(1)和(2)結合相關人體參數,可以計算出膝關節中心與踝關節中心的位置。

小腿環節定義為膝關節中心與踝關節中心連接而成的剛體。那么,小腿環節的質心位置為:

1.3.2 足尖模型 將腳尖標記點貼于足部腳尖處,需滿足腳跟標記點、踝關節中心和腳尖標記點在一條直線上(見圖B),此模型將足環節定義為腳跟與腳尖連接而成的剛體,足尖模型質心位置為:

1.3.3 跖趾模型 將第二跖骨末端標記點貼于第二跖骨末端處,需滿足腳跟、踝關節中心和第二跖骨末端在一條直線上(如圖C),此模型將足環節定義為腳尖與第二只顧末端連接而成的剛體,模型跖趾質心位置為:

1.3.4 跖趾關節模型 將跖趾關節外側標記點貼于第一跖骨末端,跖趾關節內側貼于第五跖骨末端,跖趾關節與跖趾關節內側連線中點為跖趾關節中心(如圖D),將足環節定義為腳跟與跖趾關節中心連接而成的剛體,跖趾關節模型質心位置為:
水庫風浪爬高計算需要通過管理體系中的矢量數據分析和空間位置管理結構,結合當地SL290—2015《水利水電工程建設征地移民安置規劃設計規范》確定計算公式,如式(1)、式(2):

1.4 國內普遍使用的三點角和四點角定義
(1)小腿環節定義為股骨外髁與踝外側髁連接的矢量(見圖A)。(2)三點角,需要股骨外側髁、踝外側髁和腳尖3個點。股骨外側髁與踝外側髁連接的矢量定義為小腿,踝外側髁和腳尖連接的矢量定義為足。因此,小腿矢量與足矢量夾角為踝關節三點角(見圖A)。(3)四點角,需要股骨外側髁、踝外側髁、腳跟和腳尖4個點。股骨外側髁與踝外側髁連接的矢量定義為小腿,和腳尖連接的矢量定義為足。因此,小腿矢量與足矢量夾角為踝關節角四點角(見圖B)。
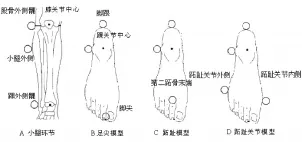
圖1 小腿環節與足環節反光球位置Figure1 Shanksegmentandmarkerorientationsonthefootsegment
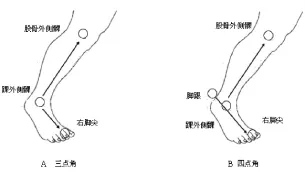
圖2 點角定義示意圖Figure2 Different point angles for ankle joint
1.5 試驗過程
試驗前,要求每名試驗對象在水平測試通道上反復行走5 min后進行運動影像采集,將所得Μarkers三維空間坐標導入Kwon3d XP(Visol,Korea),進行下肢環節構造與分析。對各指標進行標準化處理,即一個步態周期標準化為100%,一個完整步態周期分為支撐期與擺動期,0%為腳跟開始接觸地面時相,100%為腳跟再次接觸地面。
1.6 統計學處理
采用SPSS17.0(美國)對所得數據進行ANOVA方差分析,統計學顯著水平設置為P=0.05。跖趾關節模型環節角與三點角、四點角采用邦弗朗尼多重比較,統計學顯著水平設置為P<0.012 5。
2 研究結果
2.1 國際上通用的3種踝關節環節角比較與分析
2.1.1 踝關節在矢狀面背屈與跖屈運動 一個完整步態周期內,踝關節在矢狀面內共有4個角度峰值,分別出現在5%、50%、68%和85%,3種模型在峰值出現時相上的差異均無統計學意義(見圖3)。
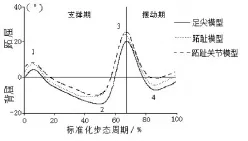
圖3 踝關節在矢狀面背屈與跖屈運動的角度變化Figure3 Ankle joint motions in sagital plane
2.1.2 踝關節在額狀面內翻與外翻運動 步態周期內,踝關節在額狀面內共有2個角度峰值分別出現在外翻期與內翻期,與足尖模型相比,支撐期內跖趾模型與跖趾關節模型外翻的幅度變化相對較平滑(見圖4)。
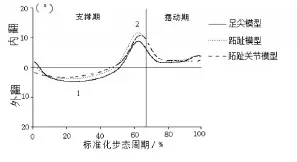
圖4 踝關節在額狀面內翻與外翻運動的角度變化Figure4 Ankle joint motions in frontal plane
2.1.3 踝關節在水平面內旋與外旋運動 踝關節在水平面內運動的關節角度變化共有3個波峰出現,前2個峰值出現在支撐期,第3個出現在擺動期(見圖5)。支撐期(12%±1.13%)3種模型內旋運動均出現第1波峰,差異無統計學意義。足尖模型在步態周期(40%±1.78%)開始外旋運動,跖趾模型與跖趾關節模型較足尖模型晚進入外旋運動,差異無統計學意義。3種模型均在支撐期結束時再次進入內旋運動,步態周期(84%± 2.84%)進入內旋的第2次波峰(見表1)。
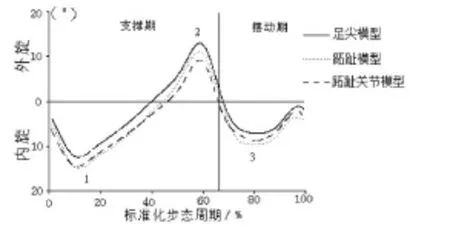
圖5 踝關節在水平面內旋與外旋運動的角度變化Figure5 Ankle joint motions in transverse plane
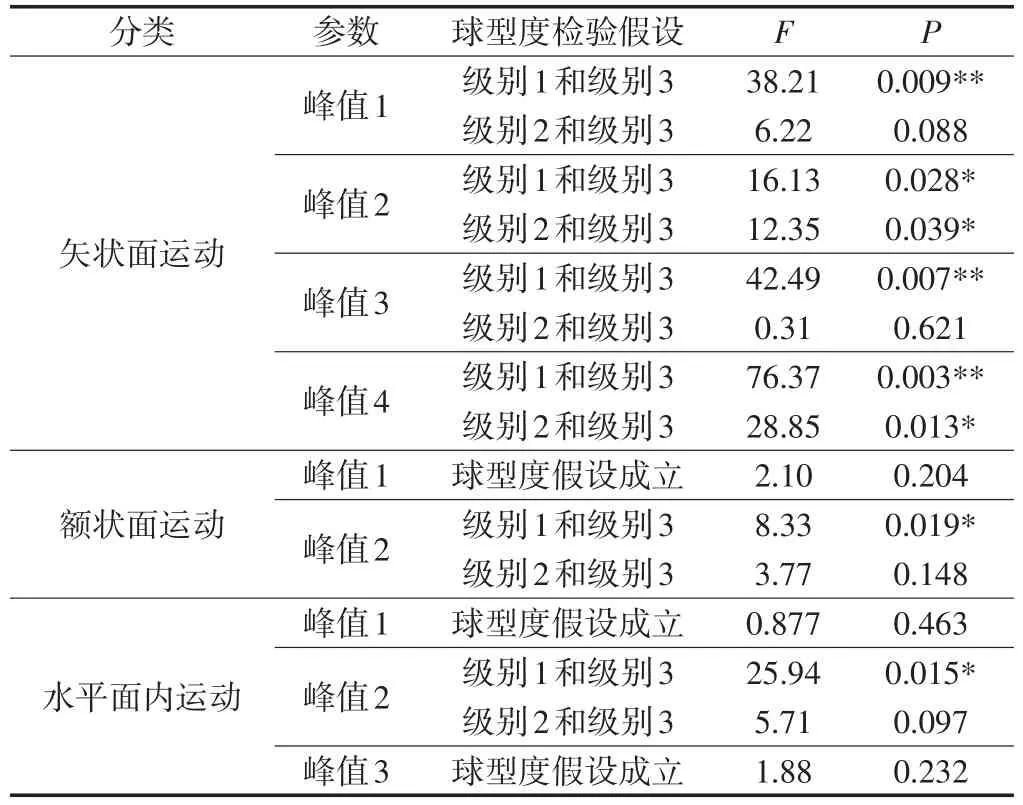
表1 單因素重復方差分析與簡單重復比較Table1 One-way repeated-measures ANOVA and simple contrasts
2.2 跖趾關節模型環節角,三點角和四點角的比較與分析
一個完整步態周期內,踝關節在矢狀面內共有4個角度峰值,分別出現在5%、50%、68%和85%。(1)峰值1。三點角為13.55o±2.24o,四點角為2.97o±2.48o,跖趾關節模型為9.21o± 2.57o。方差分析顯示,3種關節角幅值呈非常顯著性差異。(2)峰值2。三點角為-4.35o±3.93o,四點角為-14.458o±3.70o,跖趾關節模型為-10.44o±3.17o。方差分析顯示,3種關節角幅值呈非常顯著性差異,差異是由三點角與四點角、四點角與環節角之間比較的顯著性差異所產生。(3)峰值3。三點角為31.21o±2.37o,四點角為23.73o±2.44o,跖趾關節模型為29.03o±2.28o。方差分析顯示,3種關節角幅值呈非常顯著性差異,差異是由三點角與四點角、三點角與環節角之間比較的顯著性差異所產生。(4)峰值4。三點角為4.58o±1.41o,四點角為-7.79o±2.52o,跖趾關節模型為-1.38o±2.12o。方差分析顯示,3種關節角幅值呈非常顯著性差異。3種關節角兩兩比較均呈顯著性差異,4個峰值均為三點角>環節角>四點角,由于三點角均比四點角多10o以上,使它出現了3個跖屈峰值,1個背屈峰值(見圖6、表2)。
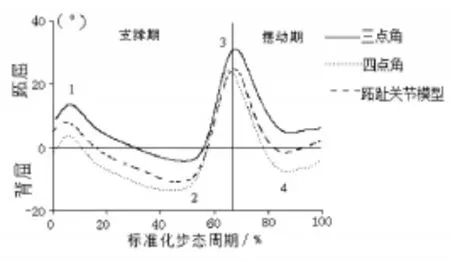
圖6 踝關節在矢狀面背屈與跖屈運動的角度變化Figure6 Ankle joint motions in sagital plane
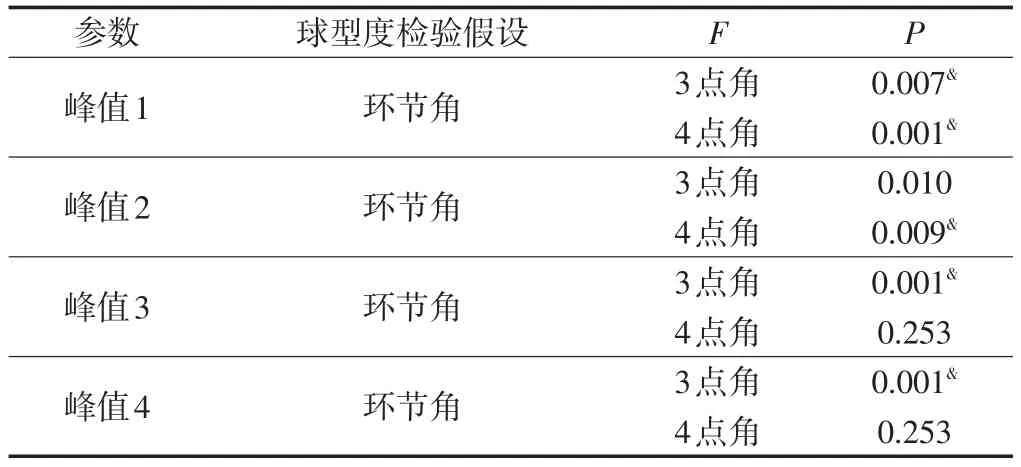
表2 單因素重復方差分析與邦弗朗尼多重比較Table2 One-way repeated-measures ANOVA and Bonferroni contrast
3 討論
國際上通用的確定關節角度的方法有3種[6]:(1)廣泛用于數學和工程領域的Cardan/Euler角,經典剛體動力學中表示剛體姿態的參數,在工程技術中使用最為普遍;(2)關節坐標系(The Joint Coordinate System,JCS),遠端環節坐標系必須相對于近端環節坐標系按順序圍繞固定于它的直角坐標軸旋轉得出的角度,此方法幾次被推薦作為國際生物力學協會對關節角定義的標準;(3)球形描繪法(Globographic Μethod),將一個移動關節的坐標軸設定為基本軸,相對于體外一個平面軸來描述關節角的矢狀軸、額狀軸和水平軸運動的方法。
研究所述環節角采用了上述第2種方法,即一個環節的局部坐標系(LCS)相對于另一個環節局部坐標系(LCS)的空間變化。在三維空間內,應該有3個旋轉自由度和3個角度參數。通過在人體不同環節(如軀干、大腿、小腿和足上)至少放置3個標記點就可以確定一個三維關節面,那么髖關節、膝關節和踝關節的三維關節角度就可以確定了。研究構造踝關節時,三點角需要3個標志點,四點角需要4個標志點,環節角需要7個標志點。也就是說,只需要增加1倍的工作量就可以在3維空間內對人體關節角進行細微的分析與研究。
皮膚表面粘貼標記點的方法已被廣泛應用于膝關節、髖關節、足和脊柱的運動學研究,隨著硬件和軟件的逐漸完善,現代運動分析系統在三維空間內的標志點捕捉精度已達1 mm。然而,人體環節不是剛體,貼于人體皮膚表面的標志點會隨人體運動相應震動。因此,皮膚運動被認為是影響人體關節或環節計算誤差的一個主要來源[7]。學者們針對如何識別和補償皮膚運動誤差提出了各種各樣的方法[8]。CAPPOZZO等(1997)提出了標志點組最佳設計方案,但其限制了關節運動范圍;LUCCHETTI等(1998)基于已知人體環節相應運動向量對皮膚運動進行了補償,缺點是增加了近一倍的工作量;LU(1999)通過全局優化的方法減小皮膚移動誤差,但其對運動捕捉系統精度要求較高。目前為止,仍沒有一種最佳方法。因此,數字化人體表面標志點過程,要在皮膚震動、關節運動范圍和測量精度三者之間進行綜合考慮。
三點角與四點角的求解過程相對簡單,在歐幾里得空間中構造出2個矢量,再通過點積法求解計算出2個矢量之間的角度值。因所求得的角度為一標量,即這一方法不能求得三維關節角度。也就是說,這2種方法運用了三維運動學解析手段,而只求得了一維角度變化。因此,生物力學和運動生物力學領域相當一部分科學研究使用三維攝影與解析方法,卻沒有達到三維分析的目的。從某種意義上說,這是“偽”三維運動學分析方法。
在人體常速平面行走的一個完整步態周期內,踝關節在矢狀面內足尖模型的運動幅度為35o左右,跖趾模型運動幅度為37o左右,跖趾關節模型運動幅度為39o左右。足尖模型與跖趾模關節型之間相差4o左右,其差值主要來源于矢狀面內第3波峰(支撐期結束瞬間腳尖即將離地時相)。此時刻,足尖模型與跖趾關節模型相差大約8o左右。由上文可知,跖趾關節把足環節分成前足與后足,那么由前足和后足組成了跖趾關節的運動。因此,足地接觸過程中,跖趾關節在矢狀面內有一個角度大的幅度變化,具體變化的幅值有多大還需要通過構造前足環節與后足環節對跖趾關節運動規律做進一步的研究。踝關節在額狀面內足尖模型的運動幅度大約有12o,跖趾模型運動幅度為14o左右,跖趾關節模型大約有15o左右,3種模型之間差異不大。踝關節在水平面內足尖模型的運動幅度有26o,跖趾模型運動幅度為25o左右,跖趾關節模型大約有24o左右,3種模型之間差異同樣不大。可見,3種模型在研究踝關節運動中的主要差異產生在矢狀面內,而額狀面與水平面內的差異很小。
體育運動科學研究中經常將人體的足環節定義為足尖模型,足尖模型是建立在足環節為一個剛體、沒有形變的假設基礎上。雖然這種模型解決了比賽現場不干擾運動員的條件下就可采集到運動信息,但這種模型的合理性早已受到廣大研究者的質疑[9-11]。跖趾關節模型考慮到了足地接觸過程中跖趾關節運動對足環節的影響因素,構造跖趾關節對于實驗室內8臺以上攝像機且可自動標志點識別的系統來說是一件很容易的事情,如若攝像機數目少不能覆蓋360o的范圍或人工描記標志點時,對第1跖趾處標志點數字化就是難點。因此,部份學者[12]又提出了在第2跖趾末端處粘貼1個標記點,假設其就是跖趾關節中心的辦法來代替跖趾關節模型,即跖趾模型。本文認為,如果實驗條件允許的情況下盡可能選擇跖趾模型,已獲得相對準確的信息。
此外,與環節角相比,三點角放大了踝關節角度,四點角縮小了踝關節角度變化范圍。這是由于人體解剖學特點,當人體站立成解剖學姿勢時,小腿環節的股骨外側髁與踝外側髁連接的矢量不能與地面垂直,總是有一個夾角存在,三點角與四點角在構造小腿環節時就是采用這種方法。而環節角構造小腿環節采用膝關節中心與踝關節中心連接的矢量為Z軸,幾乎與地面坐標系的XY平面垂直。就足環節而言,三點角采用右踝外側髁與足尖連接矢量構造足環節,這一連接矢量在地面坐標系XY平面內與Y軸,XZ平面內與Z軸都有一個明顯的夾角。因此,它在構造時就已經放大了2矢量之間的夾角范圍。四點角通過足跟和足尖連接矢量構造足環節,這一矢量與環節角構造足質心坐標系Z軸基本重合。也就是說,四點角的誤差是由構造小腿環節時產生的。
三點角或四點角只能對踝關節角進行粗略的一維分析,而環節角則可以構造出踝關節在矢狀面、額狀面和水平面內的三維關節運動。另外,利用環節角的思想,人體下肢大腿環節、小腿環節和足環節質心上建立局部坐標系,可以計算出人體環節相對環節質心的轉動慣量,進而求解出人體不同關節的關節力、關節力矩和關節功率[13]。
試驗研究中,經常把足環節定義為單一或多剛體模型。大致有2種誤差來源:(1)產生于人體表面皮膚的顫動;(2)產生于剛體模型的假設不成立。前者已經得到了一些學者的關注,但構建足部模型誤差卻很少有人研究[14]。OKITA[15]報告了由5個腳趾構成的前足模型與只由第1腳趾和第2腳趾構成的模型的比較研究。足環節模型假設不合理可導致研究者不能分辨人體足部不同骨或小環節運動學參數。迄今為止,還沒有一個能夠被多數研究者所普遍接受的足環節模型。同樣,評價不同足部模型運動學參數誤差水平也是一件非常困難的事情。如果關節角度變化50o左右,3o的誤差可以接受,但資料顯示[16],足環節內小關節的運動幅度都小于10o。
4 結論與建議
(1)不同足環節模型的選擇對于研究人體踝關節運動至關重要。足尖模型已受到國內外學者的廣泛質疑,經理論與數據驗證后,本研究認為此模型不適合用于構造踝關節。跖趾關節模型是研究踝關節的最佳選擇,但考慮到此模型的構造過程及其對試驗條件的高要求,只能應用于高配置的試驗室研究。
(2)三點角和四點角在描述踝關節角度變化時都不準確且有較大誤差,只能粗略地描述人體運動過程中的關節角度變化趨勢。但三點角與四點角又是研究人體運動非侵入式測量的較好辦法,如體育比賽現場、公共安全對“特殊”人群步態身份識別等方面。
(3)環節角的優點是可準確地測量人體運動特征,較適合試驗控制下對人體運動特點的精細研究,應該在運動生物力學研究中得以推廣。
[1]ANDERSON D M,ANDERSON L E,GLANZE W D.Mosby's Medical Dictionary[M].Louis:Denton,MO,2002.
[2]INMAN V T,STIEHL J B.Inman's Joints of the Ankle[M].Nevada:Reno,Williams&Wilkins,2011.
[3]LEARDINI A,BENEDETTI M G,CATANI F.An anatomically based protocol for the description of foot segment kinematics during gait[J].Clinical Biomechanics,1999,14(8):528-536.
[4]WRUGHT C J,ARNOLD B L,COFFEY T G.Repeatability of the modified Oxford foot model during gait in healthy adults[J].Gait&posture,2011,33(1):108-112.
[5]郝衛亞.人體運動的生物力學建模與計算機仿真進展[J].醫用生物力學,2011,26(2):97-104.
[6]WU G,VANDER F C,VEEGER H E.ISB recommendation on definitions of joint coordinate systems of various joints for the reporting of human joint motion—Part II:shoulder,elbow,wrist and hand[J].Journal of biomechanics,2005,38(5):981-992.
[7]HSU W H,LEWIS C L,MONAGHAN G M.Orthoses posted in both the forefoot and rearfoot reduce moments and angular impulses on lower extremity joints during walking[J].Journal of biomechanics,2014,47(11): 2618-2625.
[8]KEDGLEY A E,MCWALTER E J,WILSON D R.The Effect of coordinate system variation on in vivo patellofemoral kinematic measures[J].The Knee,2015,22(2):88-94.
[9]LEARDINI A,O'CONNOR J,GIANNINI S.Biomechanics of the natural,arthritic,and replaced human ankle joint[J].Journal of foot and ankle research,2014,7(1):1-16.
[10]劉卉.三維攝影(攝像)解析中人體關節角度計算方法[J].北京體育大學學報,2004(6):767-776.
[11]岳衛亞.人體三維運動影像解析環節角的概念與計算方法[J].南京體育學院學報:自然科學版,2009,8(3):28-30.
[12]JOHANSON M,DEARMENT A,HINES K.The effect of subtalar joint position on dorsiflexion of the ankle/rearfoot versus midfoot/forefoot during gastrocnemius stretching[J].Foot&Ankle International,2014,35(1):63-70.
[13]WHITTLE M W.Gait analysis:An introduction[M].Butterworth:Heinemann,Elsevier,2014.
[14]ARNDT T,NESTER C,LUNDGREN P.In vivo,intrinsic kinematics of the foot and ankle[J].Journal of Foot and Ankle Research,2012,5(1): 1-12.
[15]OKITA N,MEYERS S A,CHALLIS J H.An objective evaluation of a segmented foot model[J].Gait&posture,2009,30(1):27-34.
[16]SOUZA T R,MANCINI M C,ARAUJO V L.Clinical measures of hip and foot-ankle mechanics as predictors of rearfoot motion and posture [J].Manual therapy,2014,19(5):379-385.
Different Foot Models and Corresponding Variation on Ankle Joint Parameters:Experimental Verification of HumanNormalWalking
ZHANG Zongcheng1,LIU Haibin2,YUAN Wenxue2,WANG Kai3
(1.Dept.of PE,Tianjin College of Beijing University of Science and Technology,Tianjin 301830,China;2.Dept.of PE,Dalian University of Technology,Dalian 116024,China;3.Dept.of PE,Beijing Union University,Beijing 100101,China)
Objective:The aim of this research is to study different foot models and their parameters varied mechanism on ankle joint angle,provide theory reference for the research related to select pertinent model for human lower extremities,foot segment and give the correct definitions for segment angle.Methods:The shanks and foots of subjects were pasted with reflective markers to construct 3 foot segment models used by international colleagues and 2 vector foot models used by nationals.Conclusions:The Toe model was no suit for constructing ankle joint,MJoint model only suited for high equipped motion capture system and recommend Phalange model after theory and experimental verification.Three point model and four point models were vector models and have significant errors when constructing joint angle.Three point models enlarged the ankle joint angle.Four point models shrink the ankle joint angle,only suit for some special capture environment,compared with segment model.
foot models;ankle joint;segment angle;vector angle;gait cycle
G 804.6
:A
:1005-0000(2015)02-175-05
10.13297/j.cnki.issn1005-0000.2015.02.016
2014-02-10;
2015-01-16;錄用日期:2015-01-24
張宗程(1980-),男,山東文登人,講師,研究方向為體育保健。
1.北京聯合大學體育教學部,北京100101;2.大連理工大學體育教學部,遼寧大連116024;3.北京科技大學天津學院體育部,天津301830。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19