基于大學生方程式賽車整車控制器的開發
2015-03-05 05:37:28合肥工業大學機械與汽車工程學院吳其林張愛武黃嘯林李遵義
電子世界 2015年19期
合肥工業大學機械與汽車工程學院 張 奎 吳其林 張愛武 黃嘯林 李遵義
?
基于大學生方程式賽車整車控制器的開發
合肥工業大學機械與汽車工程學院 張 奎 吳其林 張愛武 黃嘯林 李遵義
【摘要】良好的車輛的操縱穩定性是參賽賽車能夠在大學生方程式汽車大賽(簡稱“中國FSC”)中取得順利的關鍵,因此針對車輛操縱穩定性的賽車整車控制器的開發就尤為重要。區別于傳統的乘用車的整車控制器,大學生方程式賽車的整車控制器的功用主要是滿足車輛的動力性和操縱穩定性,對其他性能則相對忽略。因此大學生方程式賽車的整車控制器相對較簡單,其中方程式電動賽車的整車控制器要求滿足能接收電子油門信號,與電機控制器和電池之間進行CAN通訊,并進行相應的控制,能滿足制動可靠性,車輛行駛穩定性,控制的準確性即可。
【關鍵詞】方程式賽車;控制器;CAN通訊;穩定性
引言
中國大學生方程式汽車大賽(簡稱“中國FSC”)是一項由高等院校汽車工程或汽車相關專業在校學生組隊參加的汽車設計與制造比賽。各參賽車隊按照賽事規則和賽車制造標準,在一年的時間內自行設計和制造出一輛在加速、制動、操控性等方面具有優異表現的小型單人座休閑賽車,能夠成功完成全部或部分賽事環節的比賽[1]。
目前我國在方程式賽車上的整車控制器開發上與國外還有較大差距,像國外以斯圖加特大學為代表的一類大學,由于這類大學的電車用輪轂電機驅動,因此他們開發的整車控制器不僅僅單純的控制轉矩和轉速的輸出,還要做到電子差速,對整車控制器的穩定性有更高的要求,而且其技術已經相當成熟。就國內看來目前僅有上海交通大學、同濟大學、北京理工大學等幾所名校在開發雙電機驅動的整車控制器,其他的主要有兩種形式,一種是比較簡單直接的通過電子油門直接控制電池放電電流,進而控制電機控制器從而輸出轉矩使賽車移動;另一種是同時可以與電池、電機控制器進行通訊進而根據駕駛員意圖控制轉矩輸出的整車控制器,這種控制器相對來說控制水平更加穩定,整車控制器需要具有運行穩定,可靠,反應靈敏等要求,其結構相對來說復雜,是保證整車各部件正常工作的必要條件。鑒于此,開發可以滿足方程式賽車規則的整車控制器也尤為必要。
本文主要介紹具有激活電池管理系統(BMS)、接收分析電子油門的信號,與電池管理系統(BMS)和電機控制器進行通訊,同時判斷制動信號和油門信號再控制輸出轉矩輸出等功能的一款滿足方程式賽車規則的整車控制器。
1 總體設計方案

圖1 穩壓模塊
整車控制器由主芯片,穩壓模塊,獨立CAN控制模塊,CAN收發模塊,輸出控制模塊等部分組成。由方程式賽車小電池組降壓供電。整車控制器布置于方程式賽車前環附近,這樣布置即可以減少電池及電機控制器之間大電流放電產生的電磁干擾,又靠近角度傳感器和LCD,布線相對簡單。其工作過程可分為啟動和控制運行兩個階段,其工作原理是當整車控制器接收到啟動按鈕的信號,便開始鳴笛并同時激活電池管理系統(BMS),整車控制器隨時接收來自電子油門和制動器的信號并加以分析判斷來輸出轉矩。
2 硬件設計
2.1 穩壓模塊
由于方程式賽車需要以小電池作為啟動電源,一般小電池電壓選在12V,但是整車控制器的工作電壓為5V,這就需要進行降壓處理,同時為了使整車控制器更加穩定的工作也需要設計穩壓和濾波電路。本文介紹的穩壓電路分兩級采用了三端穩壓管78M09BDT和78M05BDT,并配有單向電容器,電容器加以濾波。由于78M09BDT更耐高壓,經過78M09BDT穩壓后,78M05BDT可以處于一個相對穩定的環境。其中5V穩壓電路如圖1所示,圖1中12V的電壓來自電車的安全回路,通電時經過單向電容C1和電容C2濾掉一部分干擾諧波,經過78M09BDT后電壓降為9V,同樣經過后面的兩個電容C3和C4又濾掉一部分干擾諧波,再經過78M05BDT之后電壓即降為5V,此時再經電容C5濾波即可得到相對穩定的5V直流電輸出。
2.2 主芯片模塊
本文采用的主芯片模塊是ATmega16L-8AC,ATmega16L-8AC是一款8位嵌入式微控制器,帶有16K字節的系統內可編程閃存,其工作電壓為2.7V-5.5V,運算速度為8MHZ,可以滿足賽車使用要求,其I/O口數雖然為32,但是可以通過擴展來滿足要求。由于ATmega16其內部沒有自帶CAN控制器,所以要搭配一個獨立的CAN控制器。其中主芯片的電路圖如圖2所示,LCD通訊信號,兩路來自油門角度傳感器的信號,BMS 啟動信號,制動燈信號,制動可靠性回路信號都分別接入了主芯片模塊,主芯片通過對這些信號進行分析判斷從而輸出正確的各路信號。

圖2 主芯片外接電路
2.3 微控制器模塊
SJA1000是一種I/O設備基于內存編址的微控制器,整個電路中最重要的芯片之一。其中AD0-AD7為SJA1000進行通信的并口,RX0和TX0是CAN的通信口。在整車控制器中,采集油門踏板和制動的信號工作由SJA1000來完成,電子油門的雙路信號直接輸入到SJA1000的通信并口,采集作為監測信號,對比制動踏板信號并能夠同時根據電池狀態發送電機功率的調整指令,從而輸出正確的轉矩信號。SJA1000外接電路如圖3所示。
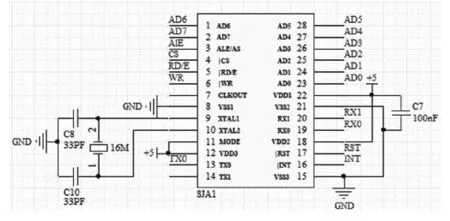
圖3 SJA1000外接電路

圖4 BMS激活電路示意圖
2.4 激活BMS模塊
根據方程式汽車大賽的要求,僅閉合安全回路時,賽車不允許進入待駛狀態,即BMS不可以直接由安全回路激活,因此BMS需要設立一個專門的啟動按鈕,當按下按鈕時,一個12V的高電平信號會激活BMS。本文介紹設計的BMS激活電路如圖4所示,從圖4可以看出,使用場效應管將單片機的5V信號放大,同時接電源端采用多個電阻并聯的形式以滿足激活BMS時有足夠的驅動電流。
2.5 制動啟動
賽車對于啟動部分的設計的要求是踩下制動的同時按啟動按鈕賽車才能進入待駛狀態,這樣可以避免在按下啟動按鈕時程序出現紊亂電機突然發力使賽車沖出去的情況。所以單片機除了接收制動踏板的信號,還要接收啟動按鈕的開關信號。因此本文采用的制動啟動的上拉電阻線路,按鈕的一端接地,另一端接STAR_BUTTON,未按下時STAR_BUTTON腳為高電平,按下時按鈕時被拉到地,為低電平。
3 軟件實現
在大學生方程式汽車大賽中,整車控制器的主要工作是接收電子油門的兩路角度傳感器信號,通過計算分析與相應的邏輯控制轉矩的輸出。整車控制器系統控制流程如圖5所示,當安全回路接通時,系統開始上電,當整車控制器檢測到制動踏板踩下并按下啟動按鈕時開始程序的初始化,即此時整車處于待駛狀態,在賽車運行過程中整車控制器需要同時檢測來自電子油門的兩路信號和制動的一路信號,如果只檢測到油門信號則輸出轉矩,但只要檢測到制動信號到一定強度便立即中斷轉矩的輸出。其中電子油門的兩路角度傳感器信號偏差不允許超過10%踏板行程,超過時整車控制器即需要切斷電機動力輸出。接收油門的角度傳感器信號同時,整車控制器還需要解析制動踏板的位移傳感器信號。當電子油門的行程超過25%,只要踩下制動踏板整車控制器即需要中斷動力輸出;當電子油門的行程在5%以內時,動力才可以輸出。此外,整車控制器還需要與電池進行通訊,控制電流的輸出,防止電池放電倍率過大燒壞電池以達到保護電池和電機控制器的目的。

圖5 系統流程圖
4 結論
FSAE電動賽車是一種專為比賽而設計制作的賽車,由于是競賽式比賽,所以控制器的可靠性與穩定性是最重要的,其追求的功能不在于多,而在于穩定控制以順利完賽。因此其在加速,剎車,操縱性方面都要求有優越的操作性和穩定性。本文介紹的整車控制器是基于方程式賽車規則開發的,該整車控制器在保證賽車良好的加速性和操作穩定性的同時,也能使賽車靈敏度有較大提高。雖然其功能較為簡單,但其目的是以最準確最可靠的狀態采集油門和制動信號來控制輸出轉矩,是賽車正常工作的必要條件。
參考文獻
[1]2015FSC&FSEC CHINA Rules(Final)20150119
[2]胡漢才.單片機原理及其接口技術(第2版)[M].清華大學出版社,2004
[3]郭天祥.51單片機C語言教程—入門.提高.開發.拓展全攻略[M].電子工業出版社,2009.
[4]姜海斌.純電動車整車控制策略及控制器的研究[D].上海交通大學碩士學位論文,2010.
[5]李伯成.嵌入式系統可靠性設計[M].電子工業出版社,2005.
