雙目立體視覺動態角度測量方法
2015-03-07 05:40:02郭繼平李阿蒙于冀平宋濤伍沛剛
中國測試 2015年7期
郭繼平李阿蒙于冀平宋 濤伍沛剛
(1.深圳市計量質量檢測研究院,廣東 深圳 518109;2.深圳大學光電工程學院,教育部光電子器件與系統重點實驗室,廣東 深圳 518060)
雙目立體視覺動態角度測量方法
郭繼平1,2,李阿蒙1,于冀平1,宋 濤1,伍沛剛1
(1.深圳市計量質量檢測研究院,廣東 深圳 518109;2.深圳大學光電工程學院,教育部光電子器件與系統重點實驗室,廣東 深圳 518060)
為實現對大幅度動態擺角及運動過程中物體空間姿態角的在線測量,提出一種基于雙目立體視覺技術的動態角度測量方法。通過標定好的雙目系統實時跟蹤采集被測物體的特征點圖像,重建特征點的空間三維坐標,進而計算出待測物的動態擺角或空間姿態角。實驗結果表明:該系統在測量擺角時示值誤差為±0.02°,測量空間姿態角時示值誤差為±0.12°,同時具有非接觸的優點,適用于動態擺角的在線測量及運動物體的空間姿態跟蹤。
動態角度測量;幾何量計量;雙目立體視覺;在線測量
0 引 言
隨著科技的進步,動態角測量需求越來越多,其中大空間范圍內的動態角在線測量問題成為近年來的研究熱點[1],如彎折試驗機動態彎折角度測量、運動物體的空間姿態角定位跟蹤等。
動態角度的大小隨時間變化,因此要求其測量方法能夠實時記錄被測角在各個時間狀態下的角度信息。綜觀國內外報道,有多種方法可用于探測動態角度[2]。其中,激光干涉測角方法測量準確度高,通常用于二維微小角度的精密測量[3]。基于莫爾條紋技術的測角方法系統結構相對簡單、分辨率高,但需借助特定的光路才能實現,應用受到一定限制[4]。基于圖像處理技術的測角方法便于進行實時測量,但其測量準確度有待提高,只能探測二維角度的變化[5-8]。基于計算機視覺的動態角度測量方法能實現三自由度動態角度測量,但測量準確度較低,需用點陣激光照射至平面物體表面,應用受到限制[9]。基于視覺技術的測量方法具有非接觸、測量范圍大、使用靈活的優點,可制成便攜式測量系統,在空間動態角度測量中有較大的應用潛力。本文對大范圍空間動態角度量的高準確度測量技術進行研究,提出一種基于雙目立體視覺技術的動態角測量方法及系統,用于解決動態擺角及空間姿態角的在線測量。
1 基于立體視覺的動態角測量方法
1.1 立體視覺測量原理
基于立體視覺的動態角測量方法主要包括2個步驟:1)利用雙目視覺系統(本文為兩個CMOS相機)采集并重建出被測物體表面特征點的三維空間坐標;2)由特征點坐標參數計算相應的角度變化量。前者的基本原理可結合圖1進行簡要說明,物體空間(世界坐標系)中的物點P(xW,yW,zW),分別成像于CMOS1和CMOS2像平面上的P1(u1,ν1)、P2(u2,ν2)點。在齊次坐標系下,世界坐標系到相機成像平面圖像坐標系之間的關系可由下式表示:
式中,Mi為大小為3×4的相機內參矩陣,矩陣中元素描述相機的焦距、主點位置、鏡頭畸變等參數,Ri、Ti是世界坐標系(xW,yW,zW)到相機坐標系(xCi,yCi,zCi)旋轉平移變換矩陣。通過攝像機標定,可預先分別得到CMOS1和CMOS2相機的內參矩陣參數和世界坐標系到各自相機坐標系的變換矩陣[10],即得到Mi、Ri、Ti,i=1,2。通過二維圖像特征提取算法可分別求出特征點在CMOS1和CMOS2中所成圖像的像素坐標(ui,νi),i=1,2。將上述已知參數代入式(1)可得到4個方程,其中只有xW,yW,zW3個未知數,可得到唯一解。通過實時采集被測物體表面特征點圖像并由上述原理計算出其空間三維坐標,便可進一步計算動態角度變化量。
1.2 動態角測量算法
動態擺角的運動軌跡在空間中一般是一個圓弧平面且為周期運動,其角度測量方法可通過跟蹤被測對象擺臂上的一個特征點,由1.1節方法計算各個時刻特征點的空間三維坐標,再根據最小二乘法擬合出擺角平面及圓弧的圓心,并由此計算出各個時刻特征點到該圓心的向量,通過求解向量夾角得到。具體步驟可結合圖2進行說明,設P為被跟蹤特征點,測量時,雙目視覺系統同步采集各時刻的特征點(P1,P2,…,PN)的圖像,計算出其三維坐標后,擬合出該N個點所在的平面∏。同時將三維坐標投影到平面∏得到各點相應的二維坐標由這些二維坐標點擬合出圓心O(x0,y0),求出某一時刻點和初始點坐標到圓心的向量便可由下式計算出該時刻擺角變化量:
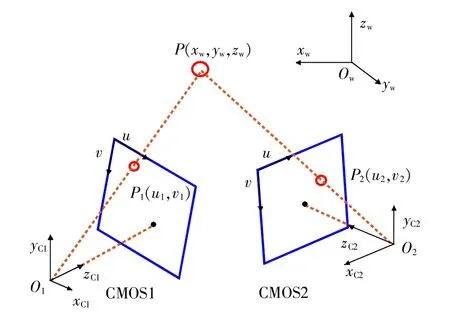
圖1 雙目立體視覺原理示意圖

式中0≤θi<π。
利用Pi和P1在運動軌跡中的位置關系,可判斷出擺角變化方向,由此可利用該方法對[-π,π]范圍內的角度變化進行測量。實際應用中,被測擺動對象的運動軌跡并不是理想的圓弧平面,計算各時刻特征點坐標到平面∏的距離,可以進一步分析出被測對象在轉動過程中的離面誤差。
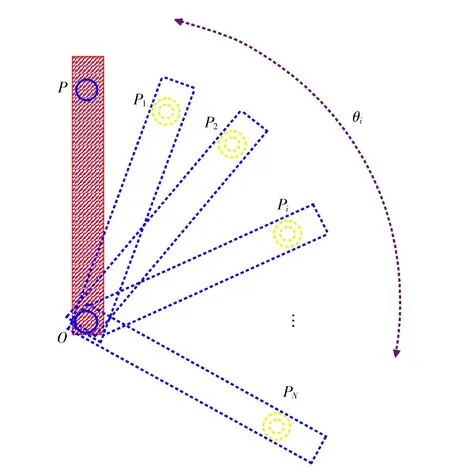
圖2 旋轉擺角測量示意圖
對于空間姿態角度的測量,需同時跟蹤被測對象表面上的3個特征點,計算出各時刻3個點的空間三維坐標,并由此擬合出各時刻此3點坐標決定的空間平面。各時刻物體的姿態角為該平面法向量與各坐標軸的夾角。實時跟蹤采集3個特征點圖像,便可通過計算其決定的平面法向量的變化求出空間姿態角的變化。
2 測量系統組成
根據上述測量原理設計便攜式測量系統,主要包括CMOS相機、光源及控制盒、同步控制器、采集卡、運算處理器、標定板、跟蹤特征靶、支撐架等部件。其中兩個CMOS相機由同步控制器進行同步,同時采集被測對象各時刻的特征點圖像。本文使用的特征點為白色圓形標志點貼紙,可方便粘貼于被測表面,對被測對象運動狀態無影響。在特定的工況下也可用跟蹤特征靶貼于被測物體表面實現跟蹤測量。標定板用于對系統的參數進行標定,使用前大圓的圓心距經過校準作為尺度標尺。
本系統中CMOS相機型號為pointgrey FL3-U3,分辨率為1280×1024,最小曝光時間為0.01ms,同步圖像采集幀率為60幀/s。受曝光時間和采集幀率的限制,使用該系統進行測量時,對被測物體運動速度有一定要求,當速度過快導致特征點圖像模糊時便不能實現準確測量。另外,系統動態角度測量分辨力取決于采集幀率和角速度,幀率越高,角度變化速度越小,系統動態測量分辨力就越高。對擺臂長為500 mm,線速度為5 mm/s的動態擺角進行測量時,系統動態角度分辨力約為0.01°。而實際應用中有很多情況需要在動態工況下對最大角擺幅度進行測量,在邊界處特征點擺動速度幾乎為零,此時系統不受分辨力的限制可準確采集特征點圖像,獲得較好的測量準確度。
3 實驗結果
為驗證系統的動態角度測量功能,對彎折試驗機的擺角進行測量。實驗中將圓形標志點貼于擺臂上與旋轉中心約100mm位置處。系統跟蹤采集試驗機擺動過程中標志點的圖像,由1.2節算法計算出各個時刻的角度,繪制角度-時間曲線如圖3所示。

圖3 彎折試驗機擺角跟蹤測量結果曲線圖
同時,為驗證系統的測量準確度,利用Zeiss角分度頭設計測量驗證實驗。該分度頭可分別沿兩個軸轉動,產生兩個方向上的角度變化(其角度示值經校準,U=0.001°,k=2)。其中一個方向為沿分度頭圓盤面內旋轉,每隔10°讀取一個角度值直至旋轉360°,產生36個標準角度變化用于驗證擺角測量準確度。另一個方向為沿俯仰方向轉動,每隔5°讀取一個角度值,產生5°,10°,15°,20°,4個標準角度變化用于驗證姿態角測量準確度。測量時僅需要保證特征點在系統視場范圍內即可,無其他安裝及定位要求。兩次實驗測量過程中,使分度頭轉盤處于旋轉運動狀態,到達各標準角度變化量時稍作停頓后繼續旋轉直至運動到最大角度位置。使用本系統對運動過程進行跟蹤,由重建出的特征點三維坐標計算出角度測量值并與標準值進行比較。擺角測量誤差曲線如圖4所示,姿態角測量誤差如表1所示。
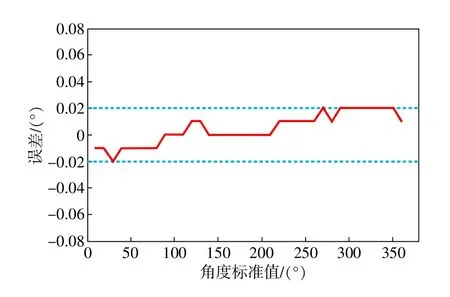
圖4 擺角測量誤差曲線
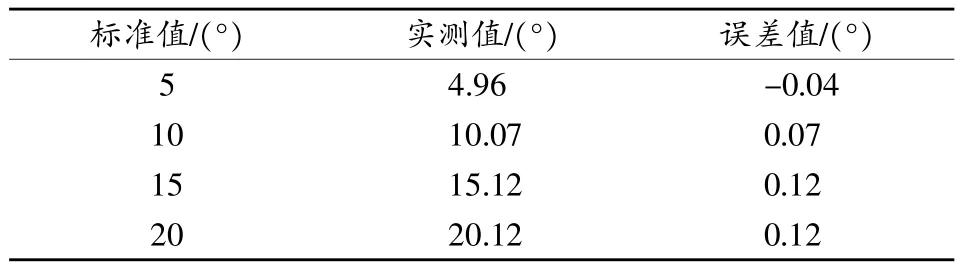
表1 空間姿態角測量實驗結果
從圖4及表1測量結果中可以看出,本系統在測量動態旋轉角度時,測量誤差可控制在±0.02°以內,測量空間姿態角誤差值在±0.12°以內。需要指出的是:由于本文方法是基于視覺技術的動態角度測量方法,在測量過程中必須保持被測物體表面標志點在雙相機公共視場范圍內。對于旋轉角測量,僅需要跟蹤1個標志點即可;對于空間姿態角測量,需要同時跟蹤測量視場范圍內至少3個標志點。系統的測量準確度與雙目系統的視場大小、基線長度、標志點尺寸、相機分辨率及物體運動速度等因素有關。本實驗中,系統視場大小約為300 mm×300 mm,雙相機基線長度約為200 mm,選用圓形特征標志點的直徑為5mm,轉盤旋轉半徑約為100mm,轉動線速度約為5mm/s。
4 結束語
本文對大幅度動態角在線測量方法進行了研究,提出一種基于立體視覺技術的動態角測量方法,并研制出相應的便攜式測量系統。實驗結果表明,提出的方法可實現對動態擺角及空間姿態角的測量。在300 mm×300 mm視場范圍內,動態擺角測量誤差為±0.02°,對20°范圍內變化的空間姿態角測量誤差為±0.12°。能夠滿足彎折試驗機、開關門試驗機等的擺角測量需求。同時,該系統具有非接觸的優點,在測量應用中不需要光軸平面與被測擺角平面垂直,可自由安裝調試,適用于在線動態角度測量。此外,該系統可實時跟蹤運動物體的空間位置軌跡,適用于振蕩篩、運動導軌的在線狀態監測,在工業生產和檢測領域有較好的應用前景。今后,可進一步提升系統的圖像采集幀率,提高動態分辨力,以提升該系統的測量能力和應用范圍,推動計量檢測技術在動態量在線測量方面發揮更大的作用。
[1]魏煥東,華建文,代作曉,等.空間傅里葉光譜儀高精密大范圍動態測角技術[J].光電工程,2009(10):47-50.
[2]于冀平,郭繼平.動態角測量方法研究進展[J].中國測試,2012(3):27-30.
[3]Masroor I,Ghazanfar H.Michelson interferometer for precision angle measurement[J].Applied Optics,1999,38(1):113-120.
[4]鄧立新,楊建坤,戴穗安,等.莫爾條紋技術的三維測角方法研究[J].光學與光電技術,2010,8(3):39-41.
[5]朱國力,吳學兵,鄒萬軍.基于PSD的角度測量系統[J].電表與儀器,2006,43(481):29-32.
[6]鄒萬軍,朱國力,吳學兵.基于面陣CCD的激光角度測量系統的研究[J].光電工程,2006,33(10):91-95.
[7]徐東亮,劉輝.基于計算機視覺的纏繞角度檢測系統[J].機電工程,2008,25(8):50-52.
[8]Li W M,Jin J,Li X F,et al.Method of rotation angle measurementin machinevision based on calibration pattern with spot arry[J].Applied Optics,2010,49(6):1001-1006.
[9]江潔,苗準,張廣軍.點結構光動態姿態角測量系統[J].激光與紅外,2010,39(3):532-536.
[10]丁菁汀.立體視覺在實際應用中的若干問題研究[D].杭州:浙江大學,2012.
Dynamic angle measurement method based on stereo vision
GUO Jiping1,2,LI Ameng1, YU Jiping1, SONG Tao1, WU Peigang1
(1.Shenzhen Academy of Metrology&Quality Inspection,Shenzhen 518109,China;2.College of Optoelectronics Engineering,Key Laboratory of Optoelectronic Devices and Systems,Education Ministry of China,Shenzhen University,Shenzhen 518060,China)
In order to measure dynamic large swing angle and attitude angle of moving object,a dynamic angle measurementmethod based on stereo vision hasbeen presented.Firstly,the sequence images of object with point features are captured synchronously by a calibrated stereo system.Secondly,the 3D coordinates of the point features are reconstructed.Finally,the angle variation is calculated out by a specific algorithm.Experiment results show that the error of the system can reach to ±0.02°for swing angle measurementand ±0.12°for attitude angle measurement.This method can be used to measure the dynamic angle and to trace the attitude angle online with the advantage of non-contact.
dynamic angle measurement;geometric metrology;stereo vision;online measurement
A
:1674-5124(2015)07-0021-03
10.11857/j.issn.1674-5124.2015.07.005
2014-12-08;
:2015-02-18
國家自然科學基金項目(61201355,61377017)深圳市科技研發資金(CXC20110506038A)
郭繼平(1985-),男,安徽涇縣人,博士,主要從事幾何量計量及光學三維成像與測量方面的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
家庭影院技術(2017年9期)2017-09-26 03:41:45
