基于積分滑模的壓機(jī)液壓緩沖墊負(fù)載力控制
2015-03-09 03:32:54葉偉
機(jī)床與液壓 2015年21期
葉偉
(太重集團(tuán)榆次液壓工業(yè)有限公司技術(shù)中心,山西晉中 030600)
基于積分滑模的壓機(jī)液壓緩沖墊負(fù)載力控制
葉偉
(太重集團(tuán)榆次液壓工業(yè)有限公司技術(shù)中心,山西晉中 030600)
針對(duì)壓機(jī)液壓緩沖墊負(fù)載力控制問題,提出一種基于積分滑模的魯棒控制策略。該方法利用滑模控制魯棒性強(qiáng)的優(yōu)點(diǎn),實(shí)現(xiàn)了緩沖液壓墊負(fù)載力的精確跟蹤控制,并且對(duì)系統(tǒng)中的參數(shù)不確定性和外部干擾具有較好的抑制作用。理論分析與仿真結(jié)果對(duì)比驗(yàn)證了該控制算法的有效性。
壓機(jī);緩沖液壓墊;負(fù)載力;魯棒
0 前言
近年來,隨著我國汽車工業(yè)的飛速發(fā)展,大型沖壓機(jī)作為生產(chǎn)大型汽車覆蓋件必不可少的拉深設(shè)備,對(duì)汽車覆蓋件尺寸形狀精度、表面質(zhì)量及加工效率的要求越來越高[1]。傳統(tǒng)拉深工藝中原有的恒力、彈簧式緩沖方式,越來越無法滿足生產(chǎn)實(shí)際的需求,數(shù)控液壓墊緩沖技術(shù)作為一種新型的發(fā)展方向,逐漸成為機(jī)械壓力機(jī)的重要組成部分,對(duì)提高拉伸質(zhì)量,滿足復(fù)雜工件不同拉延要求,延長設(shè)備使用壽命,提高設(shè)備利用率有重大貢獻(xiàn),已成為各國學(xué)者研究、關(guān)注的焦點(diǎn)[1]。
若薄板沖壓過程中,緩沖力過小,則無法有效控制材料流動(dòng),板料容易起皺;壓邊力過大,雖可避免起皺,但材料拉破可能性會(huì)明顯增加,同時(shí)模具和材料的表面受損可能性也相應(yīng)增大,從而影響模具壽命和板料拉伸成型的質(zhì)量[2]。因此變緩沖力控制在實(shí)際中得到廣泛應(yīng)用,即在薄板沖壓過程中,在不同位置施加不同的緩沖力。采用這種變緩沖力控制技術(shù)不僅可以提高薄板成形性能,減少和消除成形過程中起皺和破裂,而且能提高沖壓件的精度和穩(wěn)定性[3-4]。因此,緩沖液壓缸的力控制是數(shù)控液壓墊的一項(xiàng)關(guān)鍵技術(shù),力控制性能的優(yōu)劣直接影響沖壓件的成形品質(zhì)[5],必須進(jìn)行深入的研究。
對(duì)于緩沖液壓缸力控制這樣一個(gè)復(fù)雜的、動(dòng)態(tài)耦合、具有時(shí)變的非線性系統(tǒng),存在緩沖缸運(yùn)動(dòng)速度和緩沖力之間的耦合、伺服閥流量與壓差關(guān)系非線性、油液彈性模量的變化,液壓缸泄漏系數(shù)的變化,泵源壓力的波動(dòng)等不確定性因素[6-7],這些客觀存在的實(shí)際情況使得控制系統(tǒng)性能變差,以致常規(guī)的反饋控制技術(shù)不能滿足控制要求。為解決上述問題,本文作者提出了一種基于積分滑模的緩沖液壓缸力控制策略,所設(shè)計(jì)的算法中,通過積分滑模對(duì)系統(tǒng)干擾進(jìn)行觀測(cè),用于減小系統(tǒng)不確定性對(duì)力控制性能的影響并通過動(dòng)態(tài)仿真來分析系統(tǒng)的動(dòng)態(tài)特性。理論與仿真結(jié)果表明,所提出的算法能夠在各種干擾和不確定下獲得精確的力控制性能,對(duì)大型沖壓機(jī)設(shè)備性能的提高具有重要意義。
1 系統(tǒng)數(shù)學(xué)模型和問題描述
典型緩沖液壓缸原理如圖1所示。
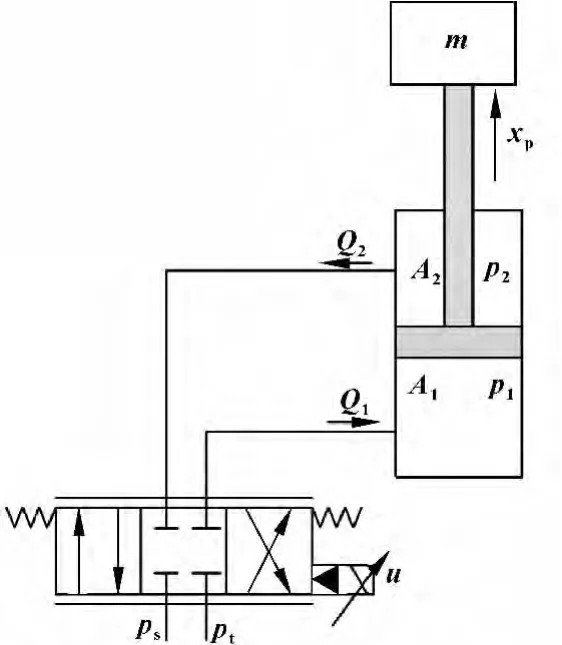
圖1 緩沖液壓缸工作原理圖
忽略液壓缸內(nèi)外泄漏,緩沖液壓缸兩腔壓力動(dòng)態(tài)為[8]:
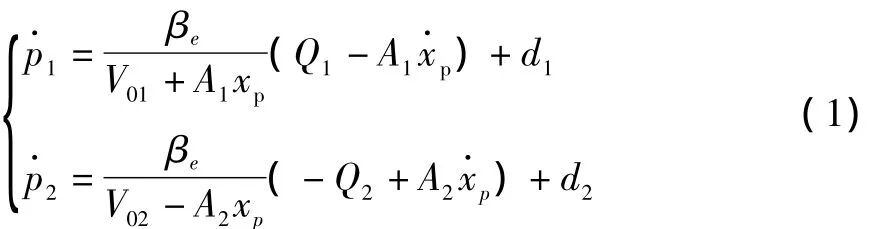
式中:p1和p2分別為緩沖液壓缸無桿腔壓力和有桿腔壓力,A1和A2分別為緩沖液壓缸無桿腔和有桿腔面積,xp為緩沖液壓缸位移,V01和V02為緩沖液壓缸無桿腔和有桿腔的初始容積,βe為油液體積彈性模量,Q1為流入液壓缸無桿腔流量,Q2為流出液壓缸有桿腔流量,d1和d2分別為兩腔壓力動(dòng)態(tài)中的集中干擾項(xiàng),由系統(tǒng)中參數(shù)不確定性和外部干擾引起。
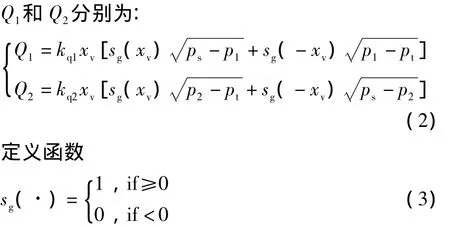
式中:kq1、kq2為伺服閥流量系數(shù),xv為伺服閥閥芯位移,ps為泵源壓力,pt為回油箱壓力。
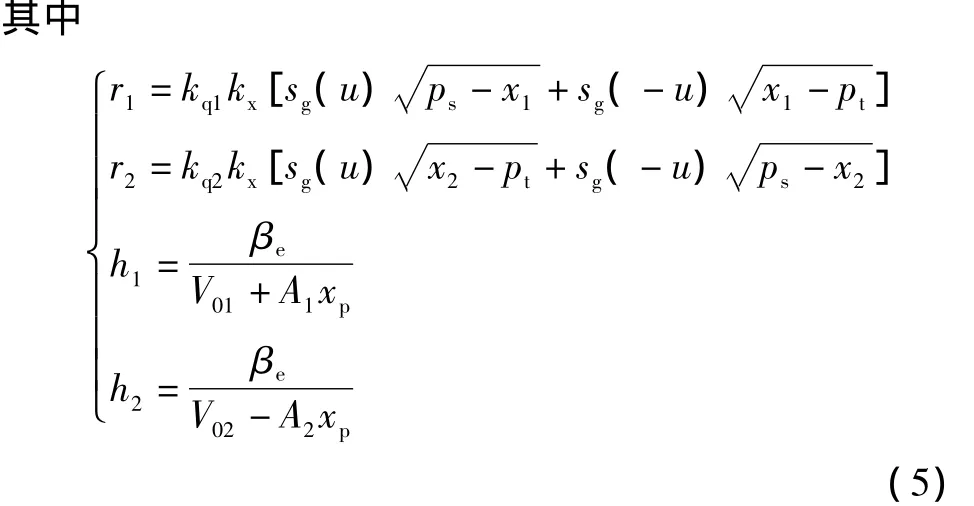
忽略伺服閥的閥芯動(dòng)態(tài),將伺服閥閥芯位移與輸入信號(hào)u的關(guān)系簡(jiǎn)化為線性關(guān)系,可得:xv=kxu。

y為緩沖液壓缸輸出負(fù)載壓力pL,α為緩沖液壓缸面積比。
由式(4)得緩沖液壓缸輸出負(fù)載壓力pL動(dòng)態(tài)為:
由系統(tǒng)狀態(tài)方程 (4)可以看出,該電液控制系統(tǒng)為非線性系統(tǒng),且由于系統(tǒng)溫度、工作環(huán)境的不同,系統(tǒng)中參數(shù)存在不確定性,因此本文控制目標(biāo)可歸納為:
針對(duì)緩沖液壓缸電液伺服系統(tǒng),在存在參數(shù)不確定性和外部干擾的情況下,設(shè)計(jì)一種控制算法,在保證系統(tǒng)穩(wěn)定性的前提下,使緩沖缸負(fù)載壓力y精確的跟隨壓力指令yd。
2 算法設(shè)計(jì)
定義緩沖液壓缸負(fù)載壓力跟蹤誤差為y~=y-yd,取:


3 仿真結(jié)果及分析
首先在恒定上模壓下速度30 mm/s下進(jìn)行緩沖力閉環(huán)控制性能仿真,并與PID控制效果進(jìn)行對(duì)比,仿真結(jié)果如圖2、圖3所示。由圖3可以看出,文中的積分滑模控制算法輸出誤差的絕對(duì)值小于PID控制結(jié)果,具有較好的動(dòng)態(tài)性能。
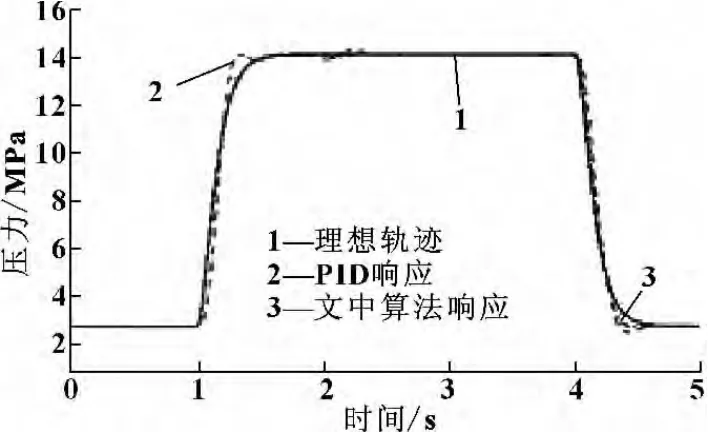
圖2 兩種算法響應(yīng)曲線對(duì)比
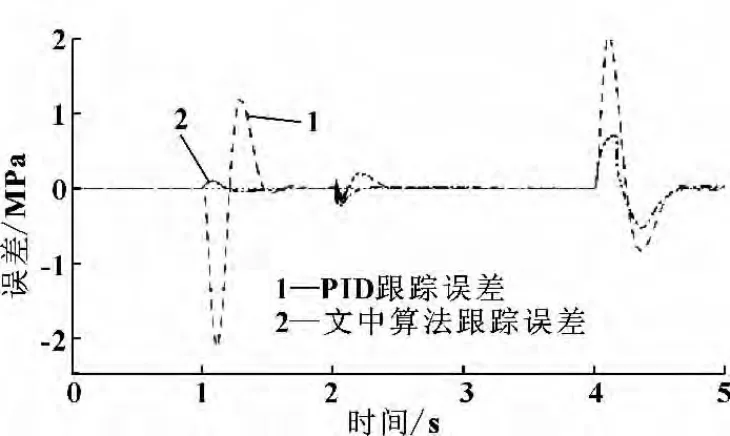
圖3 兩種算法響應(yīng)誤差對(duì)比
為了驗(yàn)證控制器克服系統(tǒng)不確定性的能力,上模壓下速度取設(shè)為變量,如圖4所示,跟蹤誤差仿真結(jié)果如圖5所示。采用文中的積分滑模算法時(shí),得到了較好的控制效果,輸出誤差絕對(duì)值小于0.6 MPa;當(dāng)采用PID控制策略時(shí),跟蹤誤差明顯增加,最大誤差絕對(duì)值超過1.5 MPa,這表明干擾對(duì)系統(tǒng)控制性能有較大的影響,而采用文中的控制方法能夠有效地克服這種影響。
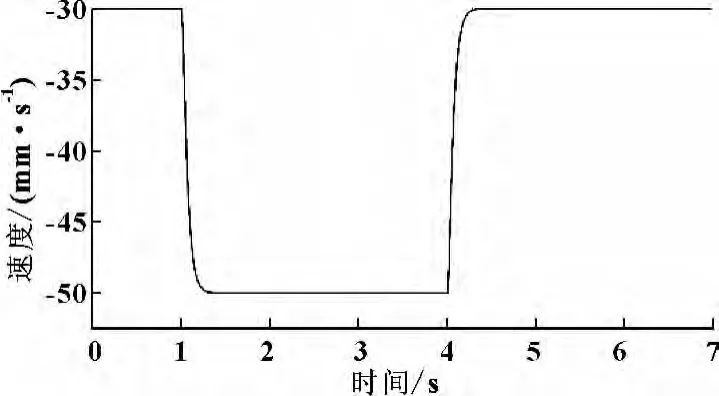
圖4 速度干擾曲線
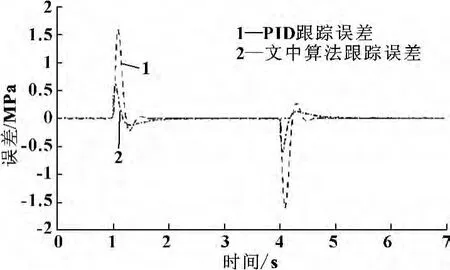
圖5 兩種算法響應(yīng)誤差對(duì)比
4 結(jié)論
提出一種基于積分滑模的緩沖液壓缸輸出力控制策略,用于對(duì)存在外界干擾與參數(shù)不確定性的緩沖液壓缸輸出力控制,給出了滑模面及控制律的設(shè)計(jì)方法。仿真結(jié)果表明:該控制方法可取得良好的控制性能,具有較強(qiáng)的魯棒特性,能夠很好地克服不確定參數(shù)以及由外部干擾對(duì)系統(tǒng)的影響。
[1]王文娟.利用液壓墊進(jìn)行四角調(diào)壓的壓機(jī)液壓系統(tǒng)設(shè)計(jì)[J].流體傳動(dòng)與控制,2012(3):25 -27.
[2]夏衛(wèi)明,李輝,駱桂林,等.液壓墊結(jié)構(gòu)優(yōu)化設(shè)計(jì)[J].鍛壓裝備與制造技術(shù),2014(1):49-51.
[3]徐尚德,雷君相,于珊珊.板料拉深過程中的壓邊力控制技術(shù)[J].鍛壓裝備與制造技術(shù),2004(2):51-55.
[4]蔡喜.機(jī)械壓力機(jī)中數(shù)控液壓墊的應(yīng)用與分析[J].一重技術(shù),2011(4):32-34.
[5]宋雨芳,吳友坤,王翠萍.新型液壓機(jī)上液壓墊裝置的設(shè)計(jì)與應(yīng)用[J].鍛壓裝備與制造技術(shù),2005(4):31-32.
[6]姜萬錄,朱勇,鄭直,等.電液位置伺服系統(tǒng)非線性動(dòng)力學(xué)行為研究[J].機(jī)床與液壓,2013(17):5-11.
[7]李自光,游張平.基于Simulink的液壓伺服系統(tǒng)動(dòng)態(tài)仿真[J].中國工程機(jī)械學(xué)報(bào),2004(1):30-34.
[8] MERRITT H E.Hydraulic Control Systems[M].Wiley:1967.
[9] UTKIN V,JINGXIN S.Integral Sliding Mode in Systems Operating Under Uncertainty Conditions[C].1996.
[10]UTKIN V,GULDNER J,SHIJ.Sliding Mode Control in E-lectro-Mechanical Systems,Second Edition[M].Taylor &Francis,2009.
Integral Sliding Mode Based Load Pressure Control of Die-cushion Cylinder of Hydraulic Press
YEWei
(Technical Center,Taiyuan Heavy Machinery Group Yuci Hydraulic Industry Co.,Ltd.,Jinzhong Shanxi030600,China)
An integral slidingmode based control scheme was put forward by aimed at the problem of load pressure force control of die-cushion cylinder of hydraulic press.Thismethod was fully exploited themeritof robustness of slidingmode control,which implemented tracking control of desired load pressure trajectory of die-cushion cylinder precisely,in addition,it had good disturbance rejection function to uncertainties and external disturbances of the parameter.Theoretical analysis and simulation results in comparing show the effectivenessof the proposed control algorithm.
Hydraulic press;Die-cushion cylinder;Load pressure force;Robustness
TH137
A
1001-3881(2015)21-160-3
10.3969/j.issn.1001 -3881.2015.21.039
2014-09-02
葉偉 (1983—),男,本科,工程師,從事液壓元件設(shè)計(jì)及電液控制技術(shù)研究。E-mail:yucihydraulicsx@163.com。
