一種慣導系統工具誤差在線估計方法研究
2015-03-10 07:09:07張國龍
導航定位與授時 2015年6期
關鍵詞:系統
張國龍
(北京控制與電子技術研究所,北京100038)
?
一種慣導系統工具誤差在線估計方法研究
張國龍
(北京控制與電子技術研究所,北京100038)
為了在高動態條件下對慣導系統工具誤差進行在線估計,提出了基于衛星導航接收機原始測量信息的慣導/衛星導航深組合導航濾波方法,該方法是以衛星導航接收機偽距和偽距率作為觀測量,對慣導系統位置、速度、姿態角和陀螺、加速度計零位等誤差進行實時估計,并進行閉環補償,解決了慣導系統長航時使用時,慣導系統誤差隨時間快速發散等問題。經理論仿真和試驗驗證,該方法可以有效地抑制慣導系統誤差,具有工程實用價值。
慣導系統;深耦合濾波;在線估計
0 引言
通過衛星導航接收機(簡稱接收機)解算得到位置、速度,各方向誤差之間相互耦合,該信息與慣導系統信息融合進行復合導航,這種松耦合模式會由于量測信息相關而導致精度不高,當有效衛星個數低于4時,接收機無法給出位置和速度信息,因而導致無法正常進行復合導航。而采用接收機直接輸出的偽距、偽距率與慣導系統信息進行復合導航,且若能將復合導航算法與接收機緊密結合,使之輔助接收機進行偽碼捕獲和載波捕獲,縮小碼環和載波環的跟蹤搜索帶寬,則不僅可以大幅提高復合導航的精度,當衛星數目小于4時也可以保證一定的復合導航精度,同時也將使衛星導航接收機的抗干擾能力顯著提高。
特別在高動態環境下,慣性器件誤差特性較車載或者低速運動應用更為顯著,通過慣導/衛星導航深組合導航方法,可以有效辨識慣導系統工具誤差,提高慣導系統工具誤差在線估計精度,該方法的有效性經數學仿真得到了驗證。
1 慣性導航誤差
慣性器件以激光捷聯慣導系統中的激光陀螺和石英加速度計作為主要的研究對象,慣導系統的加速度計測量誤差數學模型如下
(1)
式中,
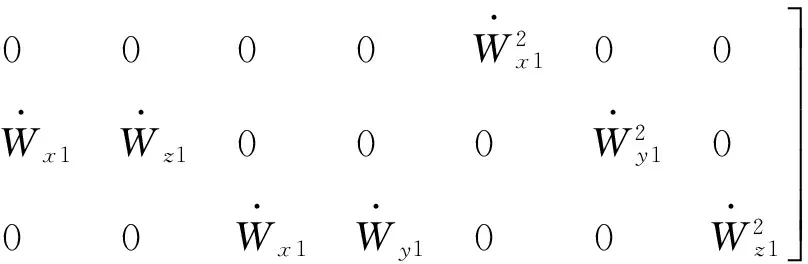
δK=[k0xk0yk0zΔk1xΔk1yΔk1zkzx
kyxkzykxykyzkxzk2xk2yk2z]T
k0x、k0y、k0z——x1、y1、z1加速度計的零偏誤差;
Δk1x、Δk1y、Δk1z——x1、y1、z1加速度計的刻度因子穩定性;
kzx、kyx、kzy、kxy、kyz、kxz——x1、y1、z1加速度計的安裝誤差;
k2x、k2y、k2z——x1、y1、z1加速度計的二階非線性。
激光陀螺測量誤差的數學模型如下
(2)
式中,

δD′=[D0xD0yDozΔE1xΔE1yΔE1z
EzxEyxEzyExyEyzExz]T;
D0x、D0y、D0z——x、y、z陀螺的常值漂移;
ΔE1x、ΔE1y、ΔE1z——x、y、z陀螺的比例誤差;
Ezx、Eyx、Ezy、Exy、Eyz、Exz——陀螺的安裝誤差。
2 慣導/衛導深耦合復合導航原理

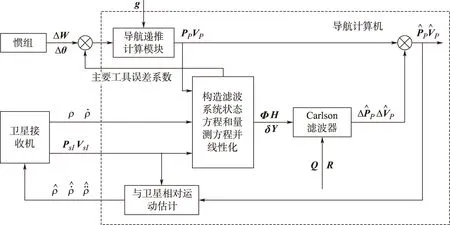
圖1 慣導/衛導深組合導航原理框圖Fig.1 The scheme of deeply integrated navigation system of INS/GNSS
3 量測方程
GPS接收機通過基帶處理能提取出衛星導航信號的發射時刻,進而與接收信號時刻求差,可以得到信號在空間的傳播時間,從而得到偽距;通過對載波相位的測量值進行處理,可以精確得到所接收衛星導航信號的多普勒頻移,從而獲得偽距率的測量值。
根據偽距、偽距率的測量方式,可以得到其量測方程。偽距的量測方程為
(3)
其中:
Sj,i=PsI,j-PI,i,為衛星到載體的位置矢量;
PsI,j為i時刻第j顆衛星在發射慣性坐標系下的位置;
c為光速,取c=2.997924580×108m/s;
Δar0為接收機鐘差;

偽距率的量測方程為
(4)
其中:

VsI,j為i時刻第j顆衛星在發射慣性坐標系下的速度;


(VsI,j-VI,i)T——相對速度矢量值。
4 仿真分析
4.1 數學仿真條件
選取激光陀螺捷聯慣導系統和接收機,建立數學模型,進行數學仿真。具體仿真狀態如表1所示。
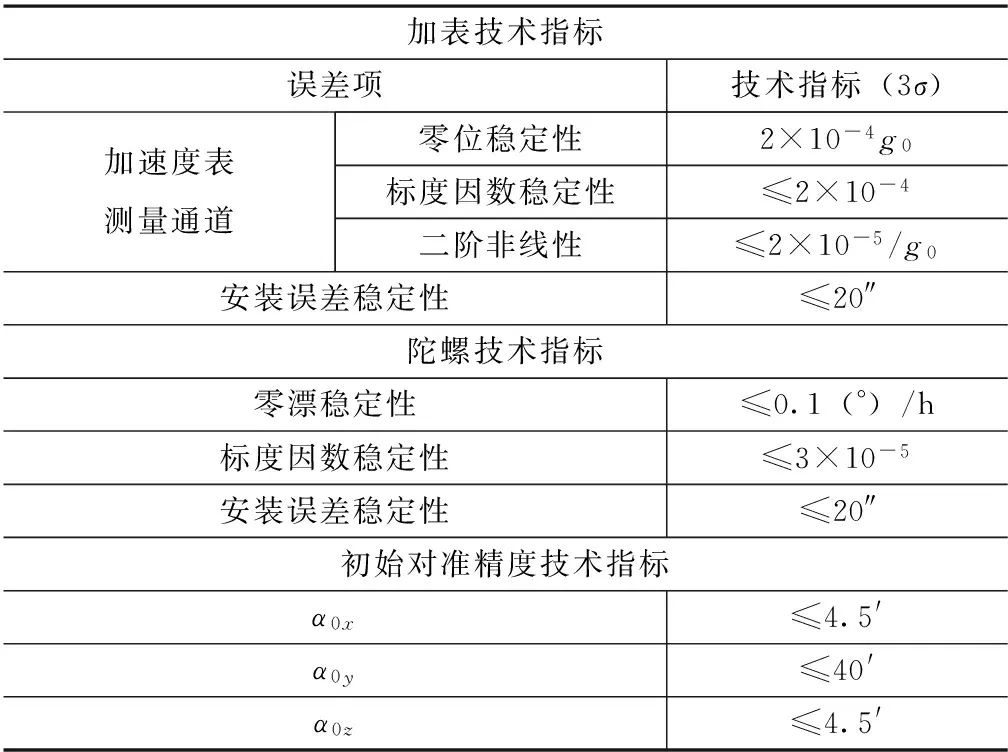
表1 激光陀螺捷聯慣導系統及初始對準的技術指標Tab.1 The technical index of Laser gyro strapdown IMU,and initial alignment
接收機技術指標:
1)接收機輸出的數據更新率為100Hz;
2)接收機輸出偽距的隨機誤差取10m(3σ);
3)接收機輸出偽距率的隨機誤差取0.3m/s(3σ)。
4.2 數學仿真結果分析
下面在高動態條件進行仿真分析,如圖2~圖5所示。

圖2 載體加速度變化Fig.2 Vehicle acceleration
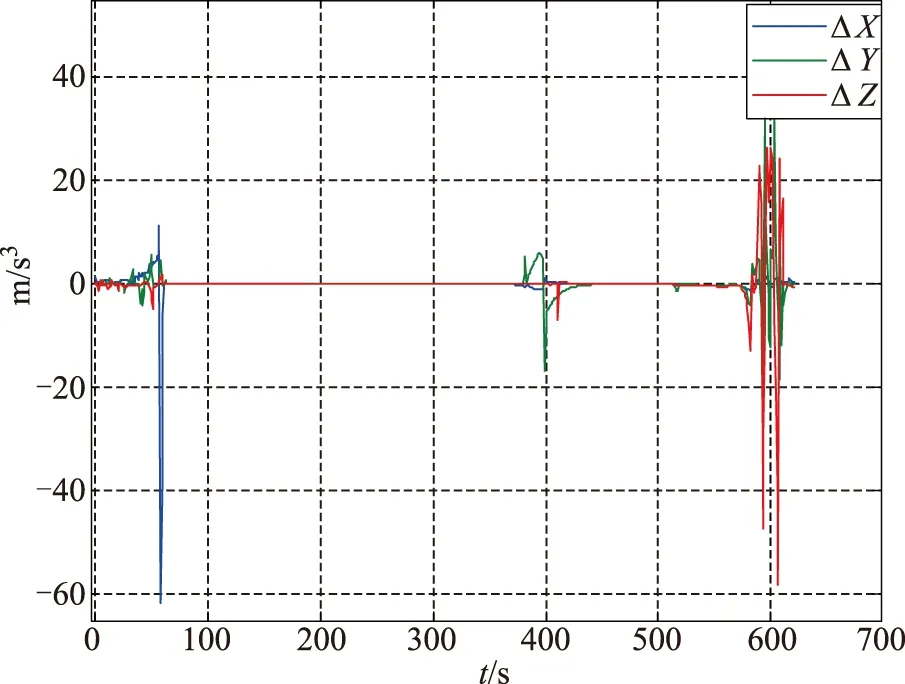
圖3 載體加加速度變化Fig.3 Vehicle acceleration rate

圖4 復合導航位置精度Fig.4 Integrated navigation location accuracy
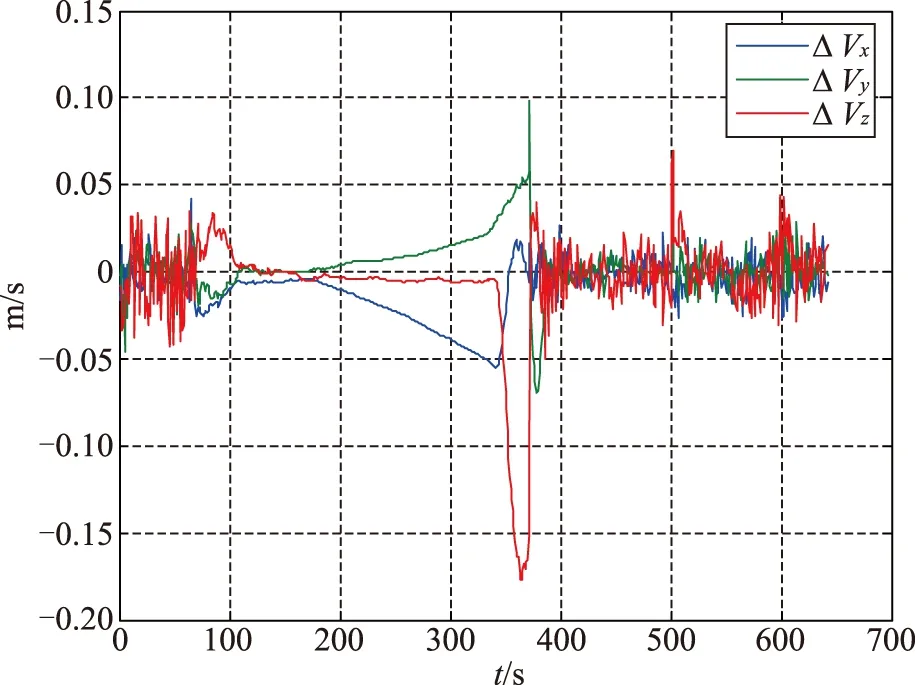
圖5 復合導航速度精度Fig.5 Integrated navigation velocity accuracy
慣導系統工具誤差估計精度如圖6~圖10所示。
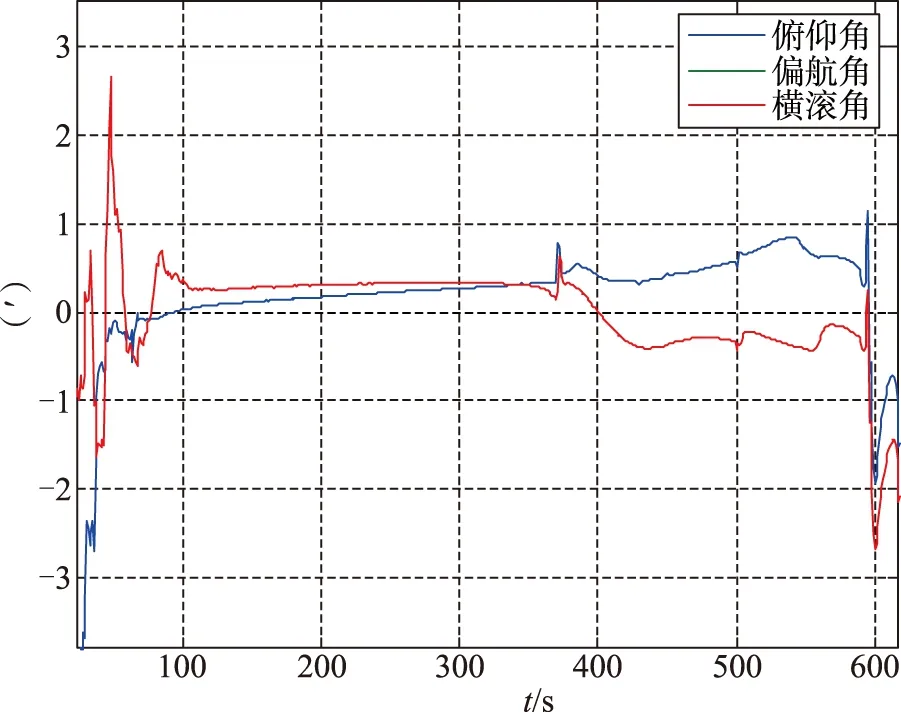
圖6 失準角估計誤差Fig.6 Misalignment angle estimation error

圖7 失準角估計誤差Fig.7 Misalignment angle estimation error

圖8 X向加表零位估計結果Fig.8 Estimated results of the X accelerometer bias
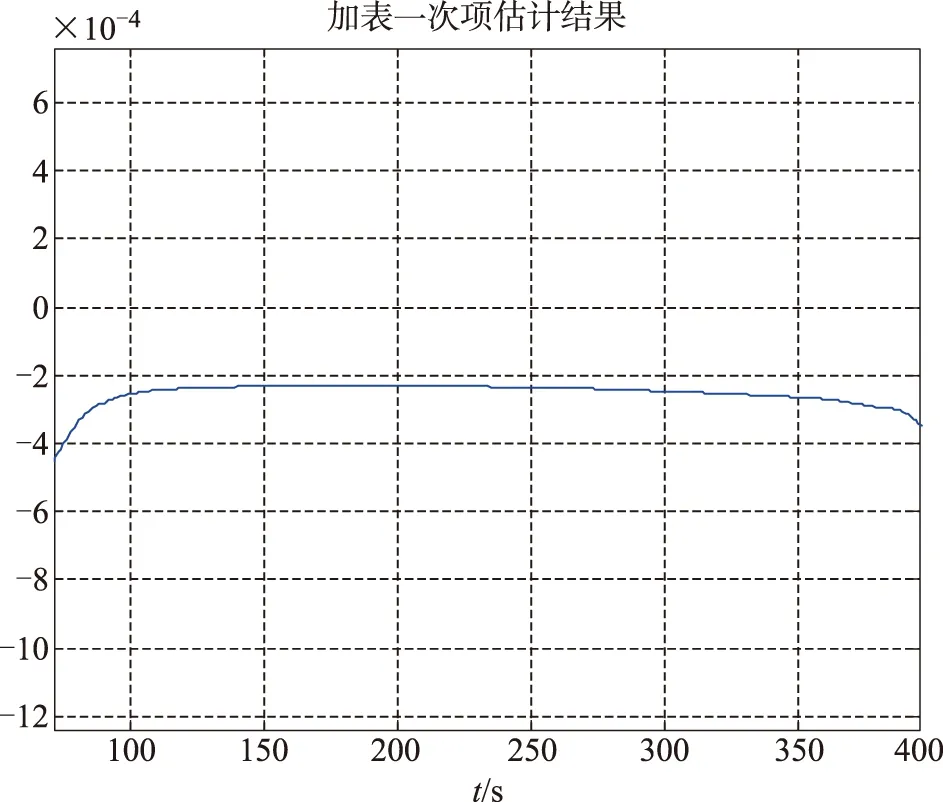
圖9 X加表一次項系數估計結果(無量綱)Fig.9 Estimated results of the accelerometerscale factor to X table(non-dimensional)
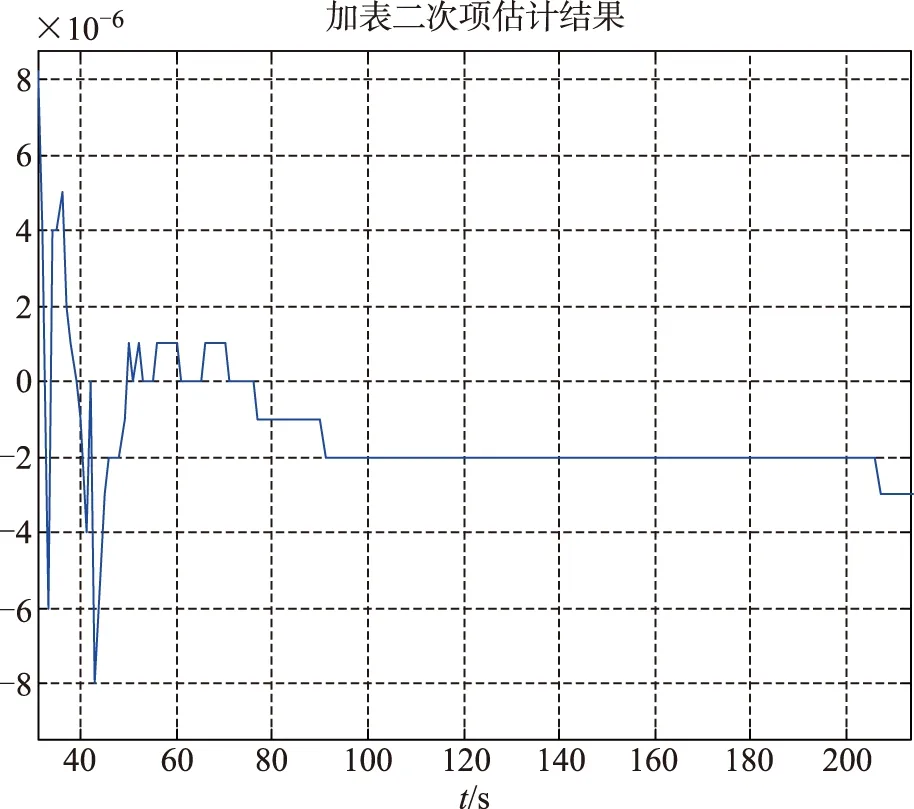
圖10 X加表二次項系數估計結果(無量綱)Fig.10 Estimated results of the accelerometersecondary items to X table(non-dimensional)
從仿真結果可以得出以下結論:
1)經過濾波估計值補償后的位置誤差小于1m,速度誤差小于0.1m/s;
2)載體飛行100s后,失準角估計值可收斂,俯仰和滾轉角對應的失準角估計誤差小于1′,偏航角對應的失準角估計誤差小于2′;
3)載體在飛行中段(300s~600s),X向加表零位估計值可收斂,估計誤差小于0.0001m/s2;
4)載體飛行100s后,X向加表一次項系數和加表二次項系數估計值可收斂,加表一次項系數估計誤差小于2×10-5,加表二次項系數估計誤差小于1×10-7。
5 結束語
本文在高動態使用條件下,對激光慣導系統工具誤差特性進行了分析,并建立了在線估計的誤差模型,提出了基于衛星導航原始測量信息的慣導/衛導深耦合導航濾波方法。經數學仿真分析,該方法可以對慣性導航位置、速度、失準角和陀螺、加表零位等誤差進行實時估計,解決了慣導系統長航時使用時,慣導系統誤差隨時間快速發散等問題,具備后續工程化應用基礎。
[1] Julier S,Uhlmann J,Durrant-Whyte H.A new approach for filtering nonlinear systems[C].Proc.of American Control Conference,Seattle,WA,1995:1628-1632.
[2] Kain J E,Cloutier J R.Rapid transfer alignment for tactical weapon applications[C]//Proce.of AIAA Guidance,Navigation and Control Conf.,Boston:MA,1989,129021300.
[3] Wendel J,Metzger J,Moenikes R,et al.A performance comparison of tightly coupled GPS/INS navigation systems based on extended and sigma point Kalman filters[J].Navigation,2006,53(1):21-31.
[4] Wendel,Jan,Trommer Gert F.Tightly coupled GPS/INS integration for missile applications[J].Aerospace Science and Technology,2004,8(7):627-634.
[5] WANG Wei,LIU Zong-yu,XIE Rong-rong.An improved tightly coupled approach for GPS/INS integration[C].Singapore,2004 IEEE Conference on Robotics,Automation and Mechatronics,2004,2:1164-1167.
[6] Debo Sun.Ultra-tight GPS/reduced IMU for land vehicle navigation[D].Calgary,2010:140-200.
[7] Anastasia Olegovna Salytcheva.Medium accuracy INS/GPS integration in various GPS environments[D].Calgary,2004:68-86.
[8] 馬云峰.MSINS/GPS組合導航系統及其數據融合技術研究[D].南京:東南大學,2006:81-83.
Research on Online Estimation Errors of Inertial Navigation System
ZHANG Guo-long
(Beijing Institute of Control & Electronic Technology,Beijing 100038,China)
For online estimation errors of inertial navigation system(INS)under the condition of high dynamic,the deep coupling filter method of INS/ GNSS(Global Navigation Satellite System)integration is proposed based on original measuring information of GNSS receiver.This method estimated the INS errors in real-time,such as position,velocity,attitude angle,gyro,accelerometer bias etc,and completed the closed loop compensation based on satellite receiver pseudo-range and pseudo-range rate as observed quantity.This method solves the problem of the inertial long-endurance,when using inertial navigation error spread rapidly over time.By theoretical simulation and experimental validation,this method can effectively inhibit the error of INS,and has engineering practical value.
INS;Deep coupling filter;On-line estimation
2015 - 05 - 28;
2015 - 07 - 08。
張國龍(1984 - ),男,博士,高工,主要從事慣導及衛星緊耦合方面的研究工作。
E-mail:181942977@qq.com
U666.1
A
2095-8110(2015)06-0038-05
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
